

Автоматический газовый хроматографический анализ
..pdfзнаки, фиксируется выброс. Коррекция производится проведением экстраполирующей прямой с наклоном, равным наклону аппроксимирующей параболы, проведенной через ближайшие к подозрительной на выброс точки пика (например, по (109)). Далее определяются углы между этой прямой и прямыми, соединяющими последнюю точку кривой с точками выброса (рис. 46). Та точка, которая дает наименьший угол отклонения, принимается за точку пика, и аппроксимирующая парабола передвигается в эту точку. Ее координаты в точках выброса и принимаются за истинные значения пика.
Рис. 46. Пример фильтрации сигнала от выбросов эмпирических алгоритмов: а – часть хроматоргаммы с начальными точками выброса g1 и h1; б – соответствующие первые и вторые (штрихпунктир) разности
Другой метод обнаружения выбросов. По хроматограмме движется фильтрующее «окно», состоящее из 3 равных участков по 3 точки каждый. Через точки крайних участков проводятся прямые с условием их пересечения в центре «окна», и устанавливаются допустимые зоны на разброс точек на среднем участке (рис. 47)
131

|
2 |
2 |
|
|
|
|
b |
|
|
2 |
|
|
|
|
|
||||||
|
|
|
|
3,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
σш σR |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2σш |
||||
где σR — разброс точек на крайних участках; |Δb| — разность наклонов прямых. Если точка на центральном участке выпадает за зону ±Δ, то она считается выбросом и сигналу в этой точке присваивается значение ординаты, соответствующей прямой.
Рис. 47. Устранение выбросов линейной экстраполяцией (стрелками показано направление движения «окна» по хроматограмме)
6.2.Коррекция базисного сигнала
Качество коррекции базисного сигнала очень сильно влияет на точность результатов обработки хроматографической информации. Процедуры коррекции значительно отличаются в зависимости от режима обработки. Поэтому рассмотрим методы коррекции базисного сигнала отдельно для проведения обработки во вторичном и реальном времени.
6.2.1. Методы коррекции базисного сигнала во вторичном времени
Методы коррекции базисного сигнала во вторичном времени можно разделить на две группы: требующие предварительного обнаружения пика (участки сигнала вне его границ принимаются за сегменты базисной линии) и ведущие сразу поиск сегментов базисной линии.
Коррекция базисного сигнала методами первой группы производится следующим образом. Для каждого участка оставшегося вне границ пиков, методом наименьших квадратов подбирают соответствующий аппроксимирующий полином, начиная с нулевого порядка и постепенно повышая степень до получения удовлетворительной аппроксимации. Пусть Qk(t) полином k-й степени независимой переменной t, тогда функция fm(t) = a0Q0(t) + … + amQm(t) является полиномом степени т. Процесс аппроксимации получается наиболее простым при использовании ортогональных полиномов. Аппроксимация этой функцией участков базисного сигнала приводит к системе из (т + 1) нормальных уравнений:
132

m |
n |
n |
|
ak Qj ti Qk ti yiQk ti ; |
k 0,1, , m . |
||
k 0 |
i 1 |
i 1 |
|
Используя свойство ортогональности, эту систему разбивают на систему независимых уравнений вида
|
n |
|
|
ak |
yiQk ti |
. |
(111) |
n |
|||
|
i 1 |
|
|
Qk ti 2
i 1
Качество подбора определяется суммой квадратов невязок:
n |
n |
m |
n |
|
n yi fm t 2 |
yi2 |
ak Qk ti 2 . |
(112) |
|
i 1 |
i 1 |
k 0 |
i 1 |
|
В предположении некоррелированного шума, для определения
необходимости введения добавочного члена можно использовать тест: отношение Fn n m 1 m 1 m соответствует F-распределению с 1 и (n —
m
m —1) степенями свободы и является мерой того, насколько новый член улучшит аппроксимацию; значимость этого отношения определяется из таблиц.
Пример методов второго типа. Пусть yi — точка базисной линии (рис. 48). Тогда последующая точка yi+1 будет отнесена к базисной линии, если
|
|
|
|
|
|
|
|
|
|
|
yi k yi k 1 |
|
|
|
|||
|
|
|
|
|||||
|
|
χσш |
|
|||||
|
|
yi 4 yi 4 |
|
χσш |
|
|
||
|
|
|
|
|||||
|
|
|
. |
(113) |
||||
|
|
|||||||
|
|
yi y j |
|
|
|
|
|
|
|
|
D |
|
|
||||
|
|
|
|
|||||
|
|
ti t j |
|
|
||||
|
|
|
|
|||||
Здесь χ и D — некоторые постоянные (χ = 2…5; величина D устанавливается в зависимости от ожидаемой величины дрейфа); k= –(m – 1), –(m – 2), … , т, где (2m + 1) — объем выборки; т = 3 … 5.
133

Рис. 48. Пример выполнения коррекции нуля во вторичном времени алгоритмами второго типа: а — хроматограмма с обнаруженными точками базисного сигнала (обозначены •); б — первые разности между соседними точками (χ —порог); в — анализ тенденций изменения сигнала (по разностям yi+4 — yi–4 для точки ti штрихпунктиром обозначена зона из 8 точек, где ведется поиск.
Первое и второе условия в (113) выявляют возможные начала пика или помехи (коррекция производится обычно после фильтрации выбросов); третье условие учитывает возможный дрейф. Если D будет выбрано очень большим, то появляется опасность принять за базисную линию плечевой пик. Если между точками базисной линии (отмечены темными точками на рис. 48) уi и уj, удовлетворяющими условию (113), нет других таких же точек, то они соединяются прямой. Другой вариант поиска точек, принадлежащих базисной линии, состоит в следующем. Хроматограмма разбивается произвольным образом на равновеликие (хотя это и не обязательно) не очень большие участки. На каждом участке фиксируются абсолютные минимумы хроматографического сигнала, которые соединяются с начальной точкой хроматограммы, задаваемой оператором и априорно принадлежащей базисной линии. За первое приближение базисной линии принимается прямая с наименьшим наклоном (1—2 на рис. 49). Затем уже из этой точки проводятся прямые, соединяющие ее с точками минимумов на остальных участках, и опять выбирается прямая с наименьшим наклоном и т.д. – до конечной точки хроматограммы. Таким образом, получается ломаная первого приближения базисной линии (1—2—4—5). Затем ищутся точки, лежащие от этой ломаной снизу на наибольшем удалении (6 и 7). Окончательно за базисную линию принимается ломаная 1—2—6—4—7—5. Аналогично производится коррекция полиномами второго порядка.
134
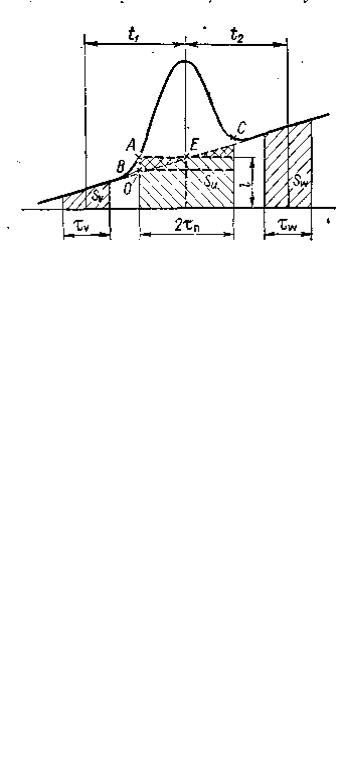
Рис.49. Автоматический поиск базовой линии. Пунктир – первоначальная оценка положения базисной линии;
штрихпунктир – уточненная оценка с линейной и квадратичной интерполяцией
Может быть предложен иной метод коррекции по построенной базисной линии при сильном (но линейном) дрейфе. Площадь Su под базисной линией в границах пика определяется через площади Sυ и Sω на участках τυ и τω перед началом и после окончания пика длительностью 2τп (рис. 50):
Su τω l mt2 τυ l mt1 . |
(114) |
где l — средняя линия трапеции Su. |
|
Рис. 50. Коррекция нуля при линейном дрейфе базисного сигнала
Перегруппируем члены в выражении (114):
Su = 2lτп = l (τυ + τω) + m (t2 τω – t1 τυ) |
(115) |
Выберем τυ и τω так, чтобы второй член в (115) был равен нулю, тогда
135

коррекция не будет зависеть от наклона базисной линии:
τυ τω 2τп ,
τυ t2 .
τω t1
Использование метода оправдано уже при изменении уровня базисной линии за счет дрейфа на 0,25 % от всей шкалы за время пика 2τп. При этом целесообразно выбирать τυ = τω = 2τп. Остаточная ошибка определяется в основном нелинейностью дрейфа. Существенными недостатками метода являются необходимость хорошего разделения пиков, т.к. время на пик фактически удваивается, и необходимость программирования интервалов τυ и τω при автоматической работе.
6.2.2. Методы коррекции базисного сигнала при работе в реальном масштабе времени
Методы коррекции базисного сигнала при работе в реальном масштабе времени предполагают проведение коррекции либо после вычисления определяющего параметра, либо непосредственно в процессе вычисления. Значения базисного сигнала измеряются в моменты, заданные программой или при отсутствии пика (невыполнении критериев его обнаружения — см. подраздел 6.3). Собственно коррекция может быть выполнена в аналоговой или цифровой форме.
При использовании устройств, работающих в реальном масштабе времени, возникает проблема устранения ложной фиксации положения базисной линии в случае плохого разделения анализируемой смеси. Если не предусмотреть никаких дополнительных мер, то в момент срабатывания селектора в случае неразделенных пиков блок запоминания положения базисной линии воспримет в точках F текущее значение сигнала за базисное, что приведет к грубым ошибкам (рис. 51).
136
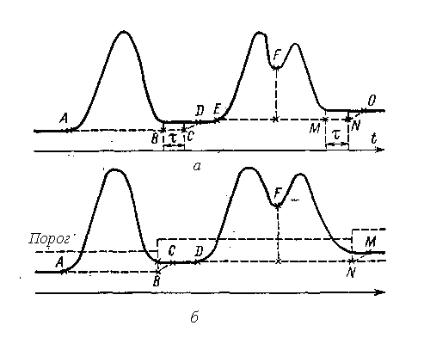
Рис. 51. Диаграмма работы корректора нуля при наличии запаздывании τ (а) и зоны работы корректора (б)
Для устранения этого ложного запоминания используют задержку включения корректора, т.е. начала слежения (измерения) за базисной линией, как показано на рис. 51, а, или измеряют базисный сигнал только в области, ограниченной некоторым пороговым уровнем, как показано на рис. 50, б.
Величина систематической погрешности δSK при оценке площади от неточной коррекции может достигать нескольких процентов (рис. 52). Исследования влияния скорости слежения υ0 на величину δSK подтвердили наличие существенной зависимости погрешности от отношения порога чувствительности селектора s (по производной) к скорости слежения и значения параметра sµ/A (рис. 53). Уже при s/υ0 = 10 она уменьшается примерно на порядок по сравнению с ее значением при s/υ0 = 1. Для высоких и узких пиков (первые пики в спектре) погрешность δSK значительно меньше, чем для низких и широких, поэтому желательно для последних уменьшать величину υ0 (увеличивать s/υ0). Следует отметить, что повышать s нельзя, т.к. при этом растет значение параметра sµ/A; это приводит к увеличению δSK и ухудшению качества обнаружения пика (см. подраздел 6.3). Поэтому порог s с течением времени анализа уменьшают, а значит, уменьшение υ0 должно быть еще более значимым. При значительном дрейфе допустимо увеличивать скорость коррекции, т.к. устройство обработки будет частично компенсировать дрейф (заштрихованные области на рис. 50).
137
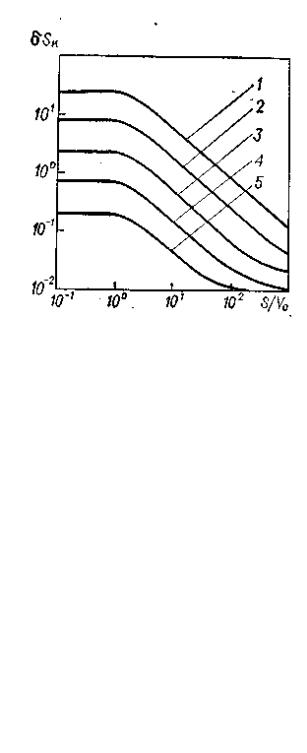
Рис. 52. Зависимость систематической погрешности δSK от относительной погрешности измерения базисного сигнала (Δу0/А) при различных уровнях срабатывания селектора уτ,/А: 1 — 10–4; 2 — 10–3; 3 —
10 –2; 4 — 10–1
Рис. 53. Зависимость δSK от отношения s/υ0 порога чувствительности селектора s к скорости слежения υ0 при различных значениях sµ/A: 1 — 0,4;
2 — 0,1;3 — 0,04; 4 — 0,01; 5 — 4·10–3
В простейшем случае следящее измерение базисного сигнала может быть произведено периодически обычным усреднением сигнала в течение определенных интервалов времени в отсутствие пика. Время усреднения при этом определяется ожидаемой шириной пика и оценивается (0,3 … 0,5)µ.
Пример частотно-импульсного следящего корректора нуля показан на
138
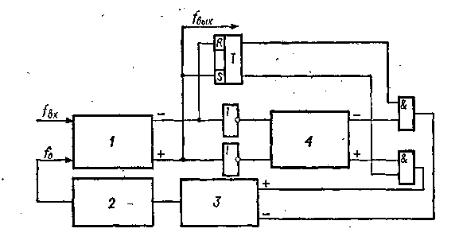
рис. 54. Импульсные последовательности с частотами fвх и f0, пропорциональными соответственно входному и базисному сигналу, сравниваются в вычитателе 1 и накапливаются в буферном счетчике 4 (запуская его по переднему фронту через инвертор). При этом триггер Т контролирует знак разности и через схемы «И» подключает выходы счетчика 4 на соответствующие входы регистра базисного сигнала 3, изменяя его содержимое до равенства частот fвх и f0. Емкость К счетчика 4 определяет величину скорости слежения. Такая схема коррекции удобна для применения в интеграторах.
Рис. 54. Структурная схема частотно-импульсного следящего корректора нуля: 1 — вычитатель; 2 — преобразователь код-частота; 3 — регистр базисного сигнала; 4 — буферный счетчик
На рис. 55, а приведены кривые переходных процессов, характеризующие динамику работы корректора в зависимости от величины рассогласования y0 и емкости буферного счетчика К, а на рис. 55, б — количество циклов измерения входного сигнала, необходимое корректору для отработки скачкообразного рассогласования величиной y0.
Инерционная коррекция может также быть осуществлена при использовании цифровой фильтрации, например с помощью фильтра последовательного экспоненциального сглаживания (см. подразд. 6.1).
139
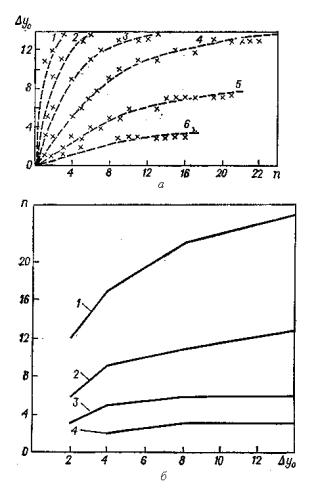
Рис. 55. Вид переходных процессов (а) при отработке следящим корректором по рис. 54 скачкообразного изменения базисного сигнала и зависимость числа циклов измерения входного сигнала, необходимого для окончания переходного процесса в корректоре, в функции рассогласования y0 (б) при различных значениях К для случаев:
Рисунок |
Кривая |
К |
y0 |
55, а |
1 |
1 |
14 |
|
2 |
2 |
14 |
|
3 |
4 |
14 |
|
4 |
8 |
14 |
|
5 |
8 |
8 |
|
6 |
8 |
4 |
55, 6 |
1 |
8 |
- |
|
2 |
4 |
- |
|
3 |
2 |
- |
|
4 |
1 |
- |
Полагая ошибку от шума в фильтруемом сигнале в i-й точке равной
140