

Надежность систем автоматизации
..pdfЛегко видеть, что в случае любого k получим
Pk (t) = e |
−λt |
+ |
(λt) |
+ |
(λt)2 |
+ |
(λt)3 |
+...+ |
(λt)k |
= e |
−λt |
k |
(λt)m |
. |
|
1 |
1! |
2! |
3! |
k! |
|
|
∑ |
m! |
|||||||
|
|
|
|
|
|
|
|
|
m=0 |
|
|||||
4.3. Расчет надежности систем при постоянно включенном резерве
На 1-м этапе рассмотрим вариант резервирования отдельных блоков однотипными узлами.
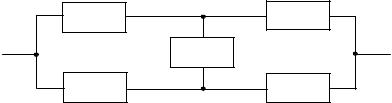
В качестве исходных данных строится надежностная схема системы. Основные элементы считаются подключенными последовательно, резервные – параллельно. Рассмотрим структуру системы, приведенную на рис. 4.2.
Здесь основными являются блоки 1, 3, 4, 8. Блок 1 является самым ненадежным и резервируется однотипным ему блоком 2. Подсистема блоков 1, 2, 3, 4 также не является достаточно надежной и потому функционально резервируется подсистемой блоков 5, 6, 7, в которой блоки 5 и 6 – однотипные с низкими показателями надежности. Блок 8 является высоконадежным и не требует резервирования.
|
|
I |
|
II |
|
|
|||
|
1 |
|
V |
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
4 |
|
|||
|
|
|
|
|
|
|
|||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
III |
|
|
|
7 |
6 |
IV |
8
Рис. 4.2. Некоторая система автоматизации
91
Пусть блок i имеет за tзад ВБР Рi. Рассчитаем надежность всей системы. Расчет производится выделением параллельных и последовательных участков и применением формул для расчета параллельного и последовательного соединения.
Для последовательного соединения
N
Pc = ∏Pi .
i=1
Для параллельного соединения
N
Pc =1− ∏(1− Pi ).
i=1
Пусть
Р1 = Р2 = 0,8; Р3 = 0,9; Р4 = 0,9, Р5 = Р6 = 0,82; Р7 = 0,85; Р8 = 0,99.
Обозначим выделенные участки римскими цифрами:
PI = 1 – (1 – P1)(1 – P2) = 1 – 0,2 0,2 = 0,96;
PII = P1P3P4 = 0,96 0,9 0,9 = 0,78;
PIII = 1 – (1 – P5)(1 – P6) = 1 – 0,18 0,18 = 0,98;
PIV = PIIIP7 = 0,98 0,85 = 0,84;
PV = 1 – (1 – PII)(1 – PIV) = 1 – 0,22 0,16 = 0,696; Pc = PVP8 = 0,96 0,99 = 0,95.
Сравним полученную надежность с надежностью нерезервированной системы:
Pнрс = P1P3P4P8 = 0,8 0,9 0,9 0,99 = 0,64.
На рис. 4.3 приведена структурная схема надежности системы с «мостиковым» резервированием. Основными являются блоки 1 и 3. Блоки 2 и 4 их дублируют. Блок 5 одновременно резервирует часть функций блоков 3 и 4. Получается мостиковая схема, в которой нет возможности выделить
92
параллельное и последовательное соединения. В таких случаях прибегают к логико-вероятностному методу расчета надежности.
Рассмотрим основные этапы расчета надежности системы логико-вероятностным методом.
1. Словесная формулировка условий работоспособности объекта. Для приведенной схемы (рис. 4.3): объект исправен, если исправны блоки 1 и 3, или блоки 2 и 4, или блоки 1, 5 и 4, или блоки 2, 5 и 3.
1 |
3 |
|
5 |
2 |
4 |
Рис. 4.3. Система автоматизации с «мостиковым» резервированием
2. Составление логической функции работоспособности:
Fл = a1a3 a2a4 a1a5a4 a2a5a3.
3. Минимизация и упрощение логической функции. Для этого можно воспользоваться разложением Шеннона:
Fл = (a1a3 a2a4 a1a5a4 a2a5a3 )(a5 а5 ) =
=a5 (a1a3 a2a4 a1a4 a2a3 ) a5 (a1a3 a2a4 ).
4.Арифметизация булевой функции. Правила арифметической функции следующие:
a b = a + b – аb, a b = a + b − ab = a + b(1− a) = a(1− b) + b;
a & b = ab, a b = ab;
93
a = 1 – a, a =1−a;
Fл = a5 (a1 a2 )(a3 a4 ) a5 (a1a3 a2a4 ) ; Fл = a5 (a1 +a2 −a1a2 )(a3 +a4 −a3a4 ) +
+(1−a5 )(a1a3 +a2a4 −a1a2a3a4 ) −
−a5 (a1 +a2 −a1a2 )(a3 + a4 −a3a4 )×
×(1−a5 )(a1a3 + a2a4 −a1a2a3a4 ).
Можно вынести за скобку повторяющееся подвыражение:
Fл = a5 (a1 + a2 −a1a2 ) (a3 +a4 −a3a4 )×
× 1− 1−a |
a a |
+a a |
4 |
−a a a a |
|
+ |
||
|
( |
5 ) ( |
1 3 |
2 |
1 2 3 4 ) |
|
||
+ (1−a5 ) (a1a3 +a2a4 −a1a2a3a4 ); Pc = P5 (P1 + P2 − P1P2 ) (P3 + P4 − P3P4 )×
× 1− 1− P |
|
PP + P P − PP P P |
|
|
+ |
||||
|
( |
5 ) ( |
1 3 2 4 1 2 3 4 ) |
|
|
||||
|
+ 1 |
− P |
PP |
+ P P |
− PP P P |
. |
|
|
|
|
( |
5 ) ( |
|
1 3 |
2 4 |
1 2 3 4 ) |
|
|
|
5. Расчет вероятности безотказной работы.
Пусть Р1 = Р2 = 0,9; Р3 = Р4 = Р5 = 0,8; Рс = 0,8(0,9 + 0,9 + 0,64) + 0,1(0,9 0,8 + 0,9 0,8 – 0,64 0,81) –
–0,8 0,1(0,9 + 0,9 – 0,64)(0,8 + 0,8 – 0,64) ×
×(0,72 + 0,72 – 0,64 0,81) = 0,938.
Ввышеприведенных расчетах допускалось, что элементы системы в смысле надежности независимы, т.е. отказы одних элементов не изменяют надежности других. Однако
вобщем случае это довольно грубое допущение, так как на самом деле элементы в системе обычно зависимы. Например, отказ одного из двух элементов, включенных параллельно, может изменить надежность оставшегося, так как последний вследствие этого может оказаться более нагруженным.
94

Чтобы учесть зависимость между элементами, надо при расчете надежности исходить не из абсолютных значений надежности составляющих элементов, а из условных надежностей, вычисленных при различных условиях отказа того или иного числа элементов системы
4.4.Особенности резервирования
вцифровой технике
Две девятки, три девятки, четыре девятки: 0,99; 0,999; 0,999… Пять девяток! Развитие технологии – это погоня за «девятками» вероятности безотказной работы. Если типичное значение коэффициента готовности (о нем речь будет в следующих подразделах) для обычной вычислительной системы составляет 99 %, что эквивалентно примерно 80 ч простоя в год, то для систем непрерывной готовности этот параметр устанавливается на уровне 99,999 % – 5 мин простоя в год!
4.4.1. Дублирование
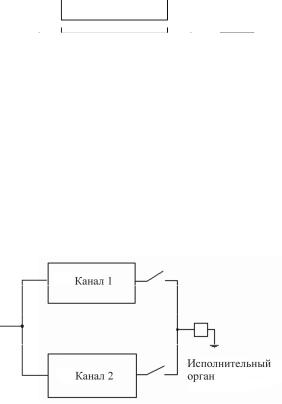
Для повышения надежности можно дублировать энергосистемы – одна работает, другая – в «подпоре», либо автоматически запускается дизель-генератор. ССН дублирования – двухканальная система – представлена на рис. 4.4.
Рис. 4.4. ССН дублирования
95
Пусть имеется два одинаковых канала ЭВМ с вероятностями безотказной работы р = 0,9 и отказа (1 – р) = 0,1. Назовем 1-й, основной, канал k1, 2-й, дублирующий, – k2. Составим ФРС:
k1 k2 = k1 + k2 −k1k2 = k1 + k2 (1−k1 ) = k1 (1−k2 ) + k2 , p1 + p2 − p1 p2 = p1 + p2 (1− p1 ) = p1 (1− p2 ) + p2.
К тому же результату можно прийти иначе, рассуждая так: отказ дублированной системы наступает при отказе двух каналов, вероятность такого события равна произведению (1 – р)(1 – р). Тогда ВБР двухканальной системы будет определяться выражением
p2 < p; 2 p(1− p) +(1− p)2 > (1− p).
Будем рассуждать 3-м способом. Система работоспособна:
1)при работоспособности двух каналов;
2)при работоспособности 1-го канала, если отказал 2-й;
3)при работоспособности 2-го канала, если отказал 1-й:
p2 + p(1− p) + p(1− p) = p2 + 2 p(1− p) = 2 p − p2 ,
p2 +2 p(1− p) +(1− p)2 = p2 +2 p −2 p2 +1−2 p + p2 =1.
Все это хорошо, но как это реализовать на практике?! Нет возможности установить, какой канал «ошибается»:
p2 < p; 2 p(1− p) +(1− p)2 > (1− p).
Вероятность безотказной работы будет ниже, чем у недублированной системы, но так называемая достоверность функционирования – выше. Иногда это важнее. Кроме того, возможно восстановление каналов (перезагрузка, тестирование и пр.) с последующим восстановлением одноили двухканальной системы. Для повышения достоверности (сте-
96
пени «доверия» к результатам вычислений) сравниваются результаты, получаемые каналами.
На рис. 4.5 представлена дублированная система со схемой сравнения (СС).
Рис. 4.5. Дублирование со сравнением результатов
Дублирование применяется для повышения надежности блоков средней степени значимости.
Рис. 4.6. Дублирование релейно-контактных систем
Дублирование применяется также для релейно-кон- тактных схем. Считается, что вероятность обрыва выше вероятности «закорачивания на плюсе». Поэтому выходы двух каналов объединяются по ИЛИ – это дизъюнкция (рис. 4.6).
97

4.4.2. Ориентировочная оценка достоверности функционирования двухканальной системы
Здесь мы имеем дело с системой, в которой есть средства оценки ее работы (средства контроля, диагностирования). Если контроль осуществляется в процессе работы системы, то это рабочий контроль (иначе – тестовый). Вообще достоверность контроля (диагностирования) – это степень соответствия результатов диагностирования действительному техническому состоянию.
Возможны следующие основные ситуации в системе объект контроля – средства контроля [18]:
–объект работоспособен (исправен) и распознается
средствами контроля как работоспособный (Ррр – вероятность такого события);
–объект неработоспособен (неисправен) и распознается
средствами контроля как неработоспособный (Рнн – вероятность такого события);
–объект работоспособен (исправен), но распознается
средствами контроля как неработоспособный (Ррн – вероятность такого события, ошибка контроля 1-го рода);
–объект неработоспособен (исправен), но распознается
средствами контроля как работоспособный (Рнр – вероятность такого события, ошибка контроля 2-го рода).
Тогда достоверность функционирования D(t) – условная вероятность того, что средства контроля правильно распознают истинное техническое состояние – «поймают ошибку»:
D(t) = |
|
Ppp (t) + Pнн(t) |
|
. |
||
Р |
(t) + Р |
(t) + P |
(t) + P |
(t) |
||
|
рр |
нн |
рн |
нр |
||
Поскольку в знаменателе – полная группа событий, то можно записать следующие выражения:
D(t) = Ррн(t) + Рнр(t) + Pннок(t)
98

с учетом ошибок 3-го рода (ошибок неправильной классификации – Рннок);
D(t) = Ррр(t) + Рнн(t) =1− D(t);
D(t) = Ррн(t) + Рнр(t).
Вероятность обнаружения ошибок, если они есть,
Pобн(t) = Рнр(t) + Рнн(t) ,
или при идеальности средств контроля (учитываются только ошибки метода контроля)
Ррн(t) = 0
Pобн(t) =1−Рнн(t()t) .
Рpp
Оценим достоверность функционирования дублированной системы. Пусть сравнение результатов выполняется схемами сложения по модулю 2 (исключающее ИЛИ). Пусть схема сравнения идеальна. В крайнем случае их тоже можно задублировать – проблема «Сторожа сторожей»! Получим вероятности состояний
Р (t) = P2 |
, |
Р (t) = 2P(1− P), |
Р |
(t) = (1− P)2 , |
Р (t) = 0. |
|||||
рр |
|
нн |
нp |
|
|
рн |
||||
D(t) = P2 +2P(1− P), |
|
(t) = (1− P)2 , P |
(t) = |
2P(1− P) |
. |
|||||
D |
||||||||||
|
||||||||||
|
|
|
|
|
|
обн |
|
1− P2 |
||
В таком случае сравним с недублированной системой, для которой достоверность функционирования Р = 0,9, недостоверность функционирования (1 – Р) = 0,1. В дублированной системе
D(t) = 0,92 +2 0,9(1−0,9) = 0,99,
D(t) = (1−0,9)2 = 0,01.
99

Оценка достоверности функционирования с учетом неидеальности схемы сравнения
Пусть Рсс – вероятность безотказной работы схемы сравнения (СС). Умножим полную группу событий предыдущего случая на полную группу событий, учитывающую схему сравнения:
|
|
P |
2 |
+2P(1− P) |
+(1− P) |
2 |
P |
+ 1− P |
|
, |
|
|
|||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
cc |
( |
|
cc ) |
|
|
|
|
||||
|
|
P |
2 |
+2P(1− P) +(1− P) |
2 |
|
P |
+ 1 |
− P = |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
cc |
( |
|
cc ) |
|
|
|
|||||
|
= P2Pcc + 2P(1− P)Pcc +(1− P)2Pcc + P2 (1− Pcc ) + |
|
|||||||||||||||||||||
|
|
|
|
|
+2P(1− P)(1− Pcc ) +(1− P)2 (1− Pcc ) ; |
|
|
|
|
||||||||||||||
|
P = P2P , |
P = 2P(1− P)P +(1− P)2 (1− P |
|
), |
|
||||||||||||||||||
|
pp |
|
|
|
|
|
cc |
нн |
|
|
|
|
cc |
|
|
|
|
сс |
|
|
|||
P |
= P2 |
(1− P |
), P |
= (1− P)2P + 2P(1− P)(1− P |
) ; |
||||||||||||||||||
pн |
|
|
|
|
|
|
cc |
нp |
|
|
|
|
cc |
|
|
|
|
|
|
cc |
|
||
|
|
|
|
|
|
|
|
P |
(t) = |
Pнн |
|
|
= |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
обн |
|
Pнн + Pнр |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
2P(1− P)P +(1− P)2 (1 |
− P |
|
) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
сс |
|
|
|
|
|
|
|
сс |
|
|
|
|
|
|
= (1− P2 )Pcc +2P(1− P)Pcc +2P(1− P)(1− Pcc ) +(1− P)2 (1− Pсс ).
Для повышения надежности блоков высшей степени значимости применяется так называемое мажоритирование.
4.4.3. Мажоритирование – троирование
Мажоритирование, или выбор двух из трех (троирование, «голосование по большинству голосов») при наличии трех совершенно одинаковых каналов, использует мажоритарные элементы (МЭ). Предполагается наиболее вероятным отказ (сбой) в одном из каналов. Сбои, или отказы, сразу в двух каналах приводят к отказу системы (рис. 4.7).
100