

Прикладная теория колебаний
..pdfПодставляя решения (2.11) в дифференциальные уравнения, получим систему однородных уравнений:
(1−m1δ11ω2 ) A1 −m2δ12ω2 A2 −... −mnδ1nω2 An = 0;
|
−m δ ω2 A +(1−m δ |
22 |
ω2 ) A −... −m δ |
2n |
ω2 A = 0; |
(2.12) |
|||||||||||||||||||||
1 21 |
1 |
|
|
|
2 |
|
|
2 |
|
n |
|
|
|
n |
|
|
|||||||||||
|
………………………………………………… |
|
|||||||||||||||||||||||||
|
−m δ ω2 A −m δ |
n |
2 |
ω2 A −... +(1−m δ |
nm |
ω2 ) A = 0. |
|
||||||||||||||||||||
|
1 n1 |
1 |
2 |
|
|
|
|
|
2 |
|
n |
|
|
|
|
|
|
|
n |
|
|
||||||
Определитель системы (2.12) имеет вид: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
(1−m δ ω2 ) |
−m |
δ ω2 |
|
... |
−m |
δ |
|
|
|
ω2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
1 |
11 |
|
2 |
|
12 |
|
|
|
|
|
n |
|
1n |
|
|
|
|
|
|
|
|
|||||
|
−m δ ω2 |
(1−m |
δ |
22 |
ω2 ) |
... |
−m |
δ |
2n |
ω2 |
|
|
= 0. |
(2.13) |
|||||||||||||
|
1 21 |
|
|
|
|
|
2 |
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
||||||
|
−m δ ω2 |
−m |
δ |
n2 |
ω2 |
... |
(1−m |
|
δ |
nm |
ω2 ) |
|
|
||||||||||||||
|
1 n1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|||||
Раскрывая (2.13), получаем уравнение n-й степени относи- |
|||||||||||||||||||||||||||
тельно параметра v = ω2. Наименьшая частота |
|
|
ω |
|
= |
v . |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
min |
|
min |
|
|
2.3.3. Приближенные методы определения частот свободных колебаний
При большом числе степеней свободы решение системы (2.12) требует очень высокой точности из-за умножения больших чисел на малые, представляющие, в свою очередь, разность больших чисел.
Существуют различные приближенные методы определения частот свободных колебаний, дающие приемлемую точность, особенно для основной частоты, имеющей первостепенное значение в решении многих инженерных задач [7, 8]. Рассмотрим некоторые из них.
51
Стр. 51 |
ЭБ ПНИПУ (elib.pstu.ru) |
Энергетический метод (метод Рэлея)
В основе метода лежит закон сохранения энергии:
K (t) +W (t) = const,
где K(t) – кинетическая энергия; W (t) – потенциальная энергия.
Если амплитуда максимальна, то K = 0, а W = Wmax, и наоборот, в момент прохождения массы через положение равно-
весия K = Kmax, W = 0; при этом Kmax = Wmax.
Рассмотрим колебания балки длиной l с распределенной по длине балки массой µ(z). Предположим, что отклонение в произвольной точке соответствует уравнению
y(z,t) = y(z)sin(ωt +ϕ),
а скорость
y(z,t) = y(z)ωcos(ωt +ϕ).
Кинетическая энергия (согласно общей |
формуле |
K = 0,5mv2 ) определяется так: |
|
K (t) = 0,5ω2 cos(ωt +ϕ)∫µ(z) y2 (z)dz. |
(2.14) |
Максимальная кинетическая энергия |
|
Kmax = 0,5ω2 ∫µ(z) y2 (z)dz, |
(2.15) |
поскольку cos(ωt +ϕ) =1. |
|
Потенциальная энергия для балки с распределенной массой
W = 0,5∑∫EJy2dz. |
(2.16) |
l |
|
Уравнение прогиба имеет вид |
|
M (z) = −EJy(z), |
|
тогда |
|
Wmax = 0,5∫EJ [y(z)]2 dz. |
(2.17) |
l |
|
52 |
|
Стр. 52 |
ЭБ ПНИПУ (elib.pstu.ru) |

Следовательно,
∫EJ [y(z)]2 dz
2 |
l |
|
|
ω = |
|
. |
(2.18) |
∫µ(z) y2 (z)dz |
|||
l
Функция y(z) неизвестна. Нужно задавать ее с учетом
граничных условий, чем точнее она выбрана, тем точнее будет решение. Если при этом функция задана с одним неопределенным параметром а, то этот параметр, входя в числитель и в знаменатель выражения (2.18), сокращается.
Пример. Определим круговую частоту колебаний балки
при µ = const; |
y = |
|
4a(lz − z2 ) |
. |
|
|
|
|
||
|
|
l2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
Решение. |
Дифференцируя |
функцию прогибов дважды, |
||||||||
|
|
|
|
|
|
10,95 EJ |
||||
получим y = − |
8a |
, тогда ω= |
|
|
µ |
, что на 11 % больше |
||||
l2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
l2 |
||
|
|
|
|
9,87 |
EJ |
|
|
|||
точного значения |
|
ω= |
|
|
µ |
. |
Если задаваемая функция яв- |
|||
|
|
l2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
ляется параболой 4-й степени, то результат будет значительно точнее.
В случае сосредоточенных масс имеем:
Kmax = 0,5∑mi∆i2 ,
где ∆i – перемещение массы mi. Отсюда
∫EJ [y(z)]2 dz
ω2 = l ∑ .
mi∆i2
53
Стр. 53 |
ЭБ ПНИПУ (elib.pstu.ru) |
Метод Ритца
По методу Ритца упругая линия системы задается в следующем виде:
n |
|
y(z) = ∑ai fi (z). |
(2.19) |
i=1
Параметры аi уже не сокращаются. Поэтому для решения задачи необходимо составить систему n уравнений типа
∂∂ai (Wmax − Kmax ) = 0.
Затем из нетривиального решения полученной системы однородных уравнений определяем спектр частот.
Если за параметры принимать неопределенные силы а (силовые параметры), то создаваемые ими прогибы будут автоматически удовлетворять граничным условиям и зависеть от изменения жесткости элементов системы. При использовании силовых параметров потенциальную энергию системы удобнее записывать через внутренние силы. Для плоских рам и балок
W = 0,5∑∫ MEJ2dz. |
(2.20) |
l |
|
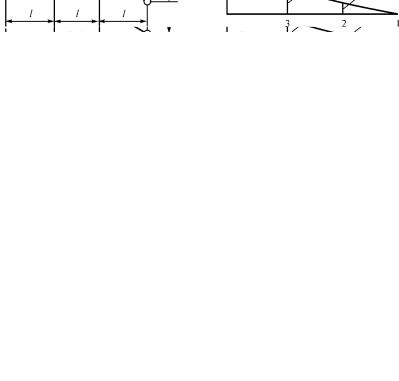
Пример. Определим круговую частоту колебаний невесомой балки, состоящей из трех масс (рис. 2.11). EJ = const.
а |
б |
Рис. 2.11. Балка, состоящая из трех масс: а – динамическая модель; б – эпюра изгибающих моментов
54
Стр. 54 |
ЭБ ПНИПУ (elib.pstu.ru) |

Решение. 1. Приложим в точках, где сосредоточены массы, неопределенные силы ai (a1, a2 , a3 ).
2. Построим эпюру моментов М (рис. 2.11, б):
Wmax = 6lEJ3 (a12 27 + a22 8 + a32 + 2a1a2 14 + 2a1a3 4 + 2a2a3 2,5).
3. GПриложим последовательно к узлам 1, 2, 3 единичные
силы P =1 и построим соответствующие единичные эпюры M. Определяем перемещения (по Мору):
∆1 = (a1 54 + a2 28 + a3 8)l3 ; 6EJ
∆2 = (a1 28 +a2 16 + a3 5)l3 ; 6EJ
∆3 = (a1 8 + a2 5 + a3 2)l3 .
6EJ
4.Определяем Kmax:
Kmax = (a12 3764 + a22 1065 + a32 93 + 2a1a2 2000 +
+ 2a a 588 +2a a 314) |
ω2ml6 |
. |
||
72(EJ )2 |
||||
1 3 |
2 3 |
|
||
5. Определяем условия минимума отклонений энергий:
∂∂ai (Wmax − Kmax ) = 0.
Раскрываем определитель 3-го порядка: 676λ3 −1703λ2 + 468λ−3,25 = 0,
в котором
λi = mωi2l3 . 12EJ
55
Стр. 55 |
ЭБ ПНИПУ (elib.pstu.ru) |
Корни уравнения: λ1 = 7,129 10−3, λ2 = 0,3056, λ3 = 2,207.
ω2 = 0,0855EJ
Тогда частота 1-го тона 1 . ml3
6. Форма колебаний определяется через λi и решение относительно ai. Определив силы ai, определяем перемещения узлов.
Методы замены и приведения масс
Эти методы приближенные, поскольку распределенная масса µ заменяется сосредоточенными массами Мп (рис. 2.12, а); то-
гда δ |
= |
l3 |
и ω = |
9,8 |
EJ |
. |
|
48EJ |
l2 |
µ |
|||||
11 |
|
1 |
|
а
б
Рис. 2.12. Динамическая модель балки на двух опорах с сосредоточенной массой: а – до переноса; б – после переноса
Метод переноса масс (см. рис. 2.12). Возьмем произволь-
ную точку K (см. рис. 2.12, б). До переноса ω2 |
= |
1 |
|
. После |
|||||||
|
|||||||||||
|
|
|
|
|
1 |
|
m1δ11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
переноса ω2 |
= |
1 |
|
. При этом если ω = ω , то α = |
|
δ11 |
. |
||||
α m δ |
|
|
|||||||||
п |
|
|
п |
1 |
|
1 |
|
δ |
kk |
||
|
|
1 1 |
kk |
|
|
|
|
|
|||
56 |
|
|
|
|
|
|
|
|
|
|
|
Стр. 56 |
ЭБ ПНИПУ (elib.pstu.ru) |

Если количество масс равно n, то заменяющая масса
Mп = ∑in=1αimi = ∑δmiδii , kk
где αi = δii / δkk , i и k – координаты положения масс.
Тогда
ω12 = Mпδkk = ∑miδii ,
или
1 |
= |
1 |
+ |
1 |
+... + |
1 |
. |
ω2 |
ω2 |
ω2 |
|
||||
|
|
|
ω2 |
||||
|
|
1 |
|
2 |
|
n |
|
(2.21)
(2.22)
Получаем заниженное значение частоты.
Метод приведения масс. Сосредоточенные и распределенные массы приводят в одну фиксированную точку, чаще всего в точку приложения динамической силы P(t). При этом приведенную массу Mп определяют из равенства кинетических энергий заданной и приведенной динамических систем:
K∑m = Km.
Принимая соотношения скоростей масс равными соотношениям перемещений во времени, запишем:
Mп yM2 = ∑mi yi2.
Тогда |
|
|
|
|
|
M |
|
= |
∑mi |
yi2 |
(2.23) |
п |
y2 |
. |
|||
|
|
|
|
||
|
|
|
M |
|
|
Чтобы определить перемещения уi масс, надо задать упругую линию y = y(x).
При действии единичной силы Р(t) = 1 и приведении масс к свободному концу консольной конструкции уравнение упругой линии консоли (рис. 2.13) имеет вид
57
Стр. 57 |
ЭБ ПНИПУ (elib.pstu.ru) |

|
|
|
|
|
3lz2 − |
|
z3 |
|
|
|
|
|
|||
|
|
y = |
|
3 |
. |
|
|
(2.24) |
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
2EJ |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Задавая |
|
|
трехмассовую |
схему |
||||||||||
консоли, получим перемещения масс: |
|||||||||||||||
y = |
9l3 |
; y |
|
= |
4,667l3 |
; |
y |
= |
1,333l3 |
. |
|||||
|
2 |
|
|
|
|
|
|
||||||||
1 |
EJ |
|
|
|
|
EJ |
|
|
3 |
|
EJ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Тогда Мп = 1,291 кг. Учиты- |
||||||||||||||
Рис. 2.13. Схема для опре- вая, |
что |
|
δ |
|
= |
9l3 |
|
, |
получим: |
||||||
|
|
|
|
||||||||||||
деления частот колебаний |
|
|
|
11 |
|
48EJ |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
балки |
0,0861EJ |
|
|
|
|
|
|
|
|
|
|
||||
ω2 = |
|
[4]. |
|
|
|
|
|
|
|
||||||
|
ml3 |
|
|
|
|
|
|
|
|
|
|
||||
Для определения коэффициентов δik рамы (рис. 2.14) приложим единичные силы в точке расположения массы m в вертикальном и горизонтальном направлениях и построим единичные эпюры изгибающих моментов. Применение метода сил (метода Мора) позволяет записать:
EJδ = |
4l3 |
; EJδ |
|
= |
l3 |
; EJδ |
= EJδ |
|
= |
l3 |
. (2.25) |
|
22 |
|
21 |
|
|||||||
11 |
3EJ |
|
|
3EJ |
12 |
|
|
2EJ |
|
||
|
|
|
|
|
|
|
|
|
Рис. 2.14. Динамическая модель для определения частот и форм колебаний рамы
58
Стр. 58 |
ЭБ ПНИПУ (elib.pstu.ru) |

При m1 = m2 = m подставляем эти значения в уравне-
ния (2.12) и после решения квадратного уравнения относительно частоты получим:
ω1 = 0,807 mlEJ3 ; ω2 = 2,82 mlEJ3 .
Направления движения массы, отвечающие первой и второй частотам колебаний, определяем по соотношениям:
|
A2′ |
= tgβ = 2,414 |
(β = 67°30′); |
||
|
A1′ |
||||
|
1 |
1 |
|||
|
|
|
|||
A2′′ |
|
= tgβ2 = 0,414 |
(β2 =157°30′), |
||
A1′′ |
|||||
|
|
||||
где A1′, A1′′, A2′, A2′′ – амплитуды колебаний массы по этим на-
правлениям с частотами ω1 и ω2.
Направления колебаний взаимно перпендикулярны: β1 −β2 = 90° (см. рис. 2.14), т.е. формы ортогональны.
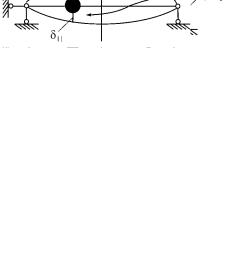
Пример. Определим низшую круговую частоту колебаний двухшарнирной симметричной рамы (рис. 2.15). Жесткость EJ. Погонная масса m = const, l = h = 2 м. Gдетали = 100 кг.
Рис. 2.15. Динамическая модель рамы на двух опорах
59
Стр. 59 |
ЭБ ПНИПУ (elib.pstu.ru) |
Решение.
Рассмотрим обратно симметричный подход. Условие симметрии позволяет считать вертикальные перемещения центральной точки ригеля равными нулю [3] и δ1 = –δ2.
Масса m1 = mh имеет амплитуду горизонтальных колеба-
ний y0 , |
масса m |
|
= |
|
|
l |
– |
амплитуду колебаний |
y0. |
Это со- |
||||||||||||||||
|
m |
|||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||
1 |
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стояние вызывается силами инерции: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
x = m ω2 y0 ; |
x = m ω2 y0 |
, |
|
|
|
|
||||||||||||||||
|
|
|
|
|
1 |
|
|
|
1 |
1 |
|
|
2 |
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
где ω2 y0 |
, ω2 y0 – ускорения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Принимаем |
|
|
колебательное |
|
движение |
|
по |
|
форме |
|||||||||||||||||
y = Asin ωt |
с ускорением y = −Aω2 sin ωt. |
|
|
|
|
|
|
|
||||||||||||||||||
Если |
обозначить |
x = mhω2 , |
|
|
|
получаем: |
x |
= xy0 , |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
x = 0,5xy0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Составляем уравнения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
y0 |
= xy0δ |
+0,5xy0δ |
|
|
, |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
1 |
|
1 |
|
11 |
|
|
|
2 |
12 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
y0 |
= xy0δ |
21 |
+0,5xy0δ |
22 |
. |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
2 |
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
Определитель системы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
(xδ11 |
−1) |
0,5xδ12 |
|
|
|
= 0. |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
xδ21 |
|
|
(0,5xδ22 −1) |
|
|
|
|
|||||||||||||||
Развертывая определитель, получаем: |
|
|
|
|
|
|||||||||||||||||||||
|
|
0,5x2 (δ δ |
22 |
−δ2 |
)− x(δ |
+0,5δ |
22 |
) +1 = 0, |
|
|
||||||||||||||||
|
|
|
|
11 |
|
12 |
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
||||||
|
0,5x2δ δ |
22 |
− xδ −0,5xδ |
22 |
+1−0,5x2δ δ |
= 0. |
|
|
||||||||||||||||||
|
|
11 |
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
21 |
12 |
|
|
|
||||
Определяем (согласно правилу перемножения эпюр):
δ = |
5h3 |
; δ |
|
= |
h3 |
; δ = |
5h3 |
. |
|
22 |
|
|
|||||
11 |
24EJ |
|
|
2EJ |
12 |
16EJ |
|
|
|
|
|
|
|
|
60
Стр. 60 |
ЭБ ПНИПУ (elib.pstu.ru) |