

Прикладная теория колебаний
..pdfчастот, показывают, что колебания гильзы с частотой 2,83 кГц имеют наилучшую проходимость по каналу блока к месту установки датчика при наименьшем коэффициенте затухания. Значительное затухание вибраций гильзы при прохождении по каналам блока наблюдается в диапазоне частот до 2 кГц.
Выделение виброакустических параметров по частоте осуществляется с помощью диагностических приборов ВДПЛСХИ и диагностической системы ДИПС, разработанной на- учно-исследовательским институтом электроизмерительных приборов (г. Москва).
6.3. Выделение виброакустического сигнала по времени
Соударения деталей в кинематических парах при работе или прокручивании ДВС происходят в определенные моменты времени. Так, образование вибрационного импульса от перекладки поршня в зазоре около верхней мертвой точки (ВМТ) и удара о гильзу у нового двигателя начинается тогда, когда коленчатый вал повернется на угол ϕi = 0…2° относительно отметки ВМТ (n = 1000 об/мин, ti = 0,0004 с), а у предельно изношенной цилиндро-поршневой группы тогда, когда угол поворота коленчатого вала (п.к.в.) ϕi = 13…16° (n = 1000 об/мин, ti = 0,0025 с).
Продолжительность импульса, вызванного ударом поршня о гильзу двигателя, составляет 28–32° п.к.в. (п = = 1000 об/мин, t = 0,005 с). Зная момент образования и продолжительность вибрационного импульса проверяемой пары, можно выделить его по времени, провести анализ и зарегистрировать параметры. Это позволит значительно повысить информативность диагностического сигнала и тем самым увеличить достоверность информации о техническом состоянии проверяемой кинематической пары.
131
Стр. 131 |
ЭБ ПНИПУ (elib.pstu.ru) |
Принцип стробирования осуществляется следующим образом. Зная момент времени начала образования импульса кинематической пары ti′ относительно опорной точки и период
следования Ti импульсов, порождаемых кинематической парой, определяют возможное максимальное смещение импульса ∆t, вызванное износом или разрегулировкой механизма. Сигнал, формируемый i-й кинематической парой, можно представить как суперпозицию периодически следующих импульсов:
ST (t) = ∑ai Si′(t −t′−kTi ± ∆τi ), |
(6.7) |
k=0 |
|
где ai Si′(t) – одиночный импульс с амплитудой ai, вызванный
проверяемой кинематической парой; k – номер импульса. Совокупность импульсов, вызванных ударами в кинема-
тических парах двигателя, представляется суммой сигналов:
N |
± ∆τi ). |
|
ST (t) = ∑∑ai Si′(t −t′−kTi |
(6.8) |
i=1 k=0
Для выделения во времени импульсов, порождаемых проверяемой кинематической парой, из общей совокупности импульсов S(t) используется последовательность прямоугольных импульсов с амплитудой, равной единице:
∆ti = ∆ti′′+ ∆τi ,
где ∆ti′′ – продолжительность вибрационного импульса. Прямоугольный импульс определяется выражением
Ψ(t) = ∑Ψ(t −ti −kTi ). |
(6.9) |
x=0 |
|
При совмещении начала образования вибрационного импульса с передним фронтом прямоугольного импульса S(t) умножается на Ψ(t) и вибрационные импульсы Si′(t), совпадаю-
щие во времени с прямоугольным импульсом Ψ(t), пропуска-
132
Стр. 132 |
ЭБ ПНИПУ (elib.pstu.ru) |
ются электронным блоком на измерительный прибор. Остальные импульсы, не совпадающие с прямоугольными импульсами определенной заданной последовательности и длительности, на измерительный прибор не пропускаются.
Выделение виброакустических параметров во времени использовано в электронных диагностических приборах типа ВДП-ЛСХИ и диагностической системе ДИПС.
6.4. Корреляционный метод выделения диагностического сигнала
Двигатель внутреннего сгорания является системой со многими входными и выходными сигналами. Множество возможных входных сигналов можно рассматривать на установившемся режиме как случайный стационарный процесс. При необходимости определения среднего квадрата ошибки сигнала на выходе, оценки стационарности процесса, наличия периодических составляющих можно использовать корреляционный метод. Корреляционная функция характеризует связи между значениями случайной функции в моменты времени t и (t + τ) и определяется выражением
R(τ) = lim |
1 |
T∫ X (t)X (t + τ)dt. |
(6.10) |
|
2π |
||||
|
−T |
|
||
|
|
|
Корреляционная функция чисто случайного стационарного процесса обычно представляет собой затухающую функцию от аргумента τ и имеет максимальное значение при τ = 0.
При периодических процессах корреляционная функция является периодической с постоянной составляющей данного процесса. Подставив в выражение (6.10) значение периодической функции, получим:
|
1 |
T ∞ ∞ |
|
|
|
|
( |
|
|
|
|
|
R(τ) = |
∫ ∑∑ |
C |
C |
|
cos |
kω t −ϕ |
|
cos (kωt −τ)ϕ |
|
dt, (6.11) |
||
|
n |
k |
||||||||||
|
2π |
k |
|
|
1 |
|
n ) |
|
||||
|
−T k=0 n=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
133 |
Стр. 133 |
ЭБ ПНИПУ (elib.pstu.ru) |
при k ≠ n
∞ |
2 |
|
|
|
R(τ) = ∑ |
Ck |
cosω1τ, |
(6.12) |
|
2 |
||||
k=1 |
|
|
где Сk и Сn – амплитуды гармоник основного и сдвинутого на время Т процесса; ϕk, ϕn – начальные фазы.
Из соотношения (6.12) следует, что корреляционная функция периодического процесса является также периодической с периодом данного процесса T и с теми же гармониками. Она не зависит только от фазовых углов.
Вычисление корреляционной функции связано с большой затратой времени, поэтому для этой цели применяют специальные приборы – корреляторы и ЭЦВМ.
На рис. 6.3, а показана корреляционная функция реализации ускорения вибрации в области четвертого цилиндра двигателя СМД-14А при начальных зазорах. Экспериментальная кривая корреляционной функции аппроксимирована уравнением
R (τ) = e−α2τ2 . |
(6.13) |
x |
|
Для двигателя СМД-14А при п = 1350 об/мин, α = 46 корреляционная функция имеет вид затухающей колебательной кривой без периодических составляющих. Отсутствие периодических составляющих объясняется малой интенсивностью импульсов от перекладки поршня при начальных зазорах.
В корреляционной функции, полученной при предельных зазорах s = 0,61…0,64 мм, имеются периодические составляющие, соответствующие частоте перекладки поршня в зазоре на такте расширения. Максимум периодической составляющей изменяется пропорционально зазору сопряжения поршень – гильза. График корреляционной функции аппроксимирован выражением
R(τ) = e−α2τ2 cosωt. |
(6.14) |
134
Стр. 134 |
ЭБ ПНИПУ (elib.pstu.ru) |

а
б
Рис. 6.3. Корреляционная функция процесса вибрации двигателя СМД-14А при работе на одном цилиндре (n = 1350 об/мин): а – при s = 0,19…0,22 мм; б – при s = 0,61…0,64 мм; 1 – экспериментальная кривая; 2 – аппроксимированная кривая
Для бестормозного режима работы двигателя СМД-14А
при п = 1850 об/мин α = 18, ω = 78 рад/с.
Из рассмотренных корреляционных функций, полученных при начальных и увеличенных зазорах в сопряжениях поршень –
135
Стр. 135 |
ЭБ ПНИПУ (elib.pstu.ru) |
гильза, видно, что при наличии в процессе периодических составляющих корреляционная функция также имеет эти составляющие. Таким образом, по виду и значению периодической составляющей корреляционной функции можно определить меру связи между структурными и диагностическими параметрами.
Корреляционный анализ виброакустического процесса может быть использован для выделения диагностических параметров и установления их связи со структурными параметрами механизмов машин. Часто для оценки связи между входными х и выходными у величинами применяют коэффициент корреляции
r |
= |
Rxy |
, |
(6.15) |
|
||||
xy |
|
σxσy |
|
|
где σх и σу – среднее квадратичное отклонение величин х и у. Коэффициент корреляции характеризует линейную зави-
симость и имеет тенденцию возрастать или убывать по линей-
ному закону у = ах + b в пределах –1 < rxy < 1.
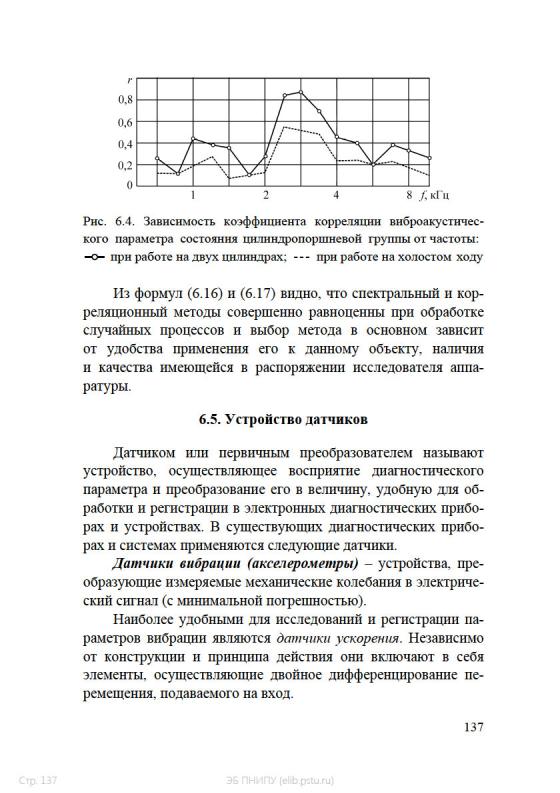
Зависимость коэффициента корреляции виброакустического диагностического параметра состояния цилиндропоршневой группы от частоты (рис. 6.4) позволяет установить, что наиболее информативной для определения зазора поршень – гильза является полоса частот 2–4 кГц. Статистическая спектральная плотность мощности S(ω) связана с функцией корреляции R(τ) преобразованием Фурье:
|
1 |
∞ |
|
S(ω) = |
∫ R(τ)e− jωt dt; |
(6.16) |
|
|
π |
−∞ |
|
|
|
|
|
|
1 |
∞ |
|
R(τ) = |
∫ S(ω)e jωt dω. |
(6.17) |
|
|
2 |
−∞ |
|
|
|
|
136
Стр. 136 |
ЭБ ПНИПУ (elib.pstu.ru) |

Идеальная характеристика датчика имеет вид
y = Sa = S |
d 2 x |
, |
(6.18) |
||
dt |
2 |
||||
|
|
|
|||
где у – выходная величина; S – чувствительность в статическом режиме; а – ускорение.
В пьезоэлектрических датчиках вибрации преобразование механических колебаний в электрические сигналы основано на появлении электрических зарядов на гранях некоторых кристаллических тел при воздействии на них механических сил.
На рис. 6.5, а приведена схема датчика Д-11, входящего в комплект диагностической прогнозирующей системы ДИПСК736. Корпус 1 жестко связан с исследуемым объектом. Инерционная масса 2 опирается на два плоских пьезокерамических элемента 3, сложенных таким образом, что поверхности, на которых образуются заряды одного знака, соединены друг с другом.
а |
б |
Рис. 6.5. Датчик вибрации Д-11: а – принципиальная схема: 1 – корпус датчика; 2 – инерционная масса; 3 – пьезокерамические элементы; 4 – токосъемник; 5 – изоляция; 6 – пружина; б – конструкция: 1 – пружина; 2 – корпус датчика; 3 – инерционная масса; 4 – фторопластовая втулка; 5 – изоляционное кольцо; 6 – пьезоэлектрические
кольца; 7 – контактная шайба
138
Стр. 138 |
ЭБ ПНИПУ (elib.pstu.ru) |
При вибрации исследуемого объекта инерционная масса т получает относительно корпуса ускорение а. При этом сила N, действуя на пьезоэлемент, вызывает его деформацию, что приводит к появлению электрического заряда, снимаемого с пластин токосъемником 4. Инерционная масса поджимается к пьезоэлементам пружиной 6. Жесткость пружины определяет частотный диапазон, а усилие поджатия пружиной инерционной массы – динамический диапазон, так как при достижении виброприемником определенного максимального ускорения инерционная масса отрывается от пьезоэлемента и дальнейшие измерения оказываются невозможными.
Перед выбором датчика необходимо изучить характеристики вибраций механизмов, а также изменения вибраций при износе механизма или сопряжения от начального до предельного. Собственная частота датчика должна в несколько раз превышать частоту вибраций измеряемых процессов. Датчики должны обладать достаточной поперечной чувствительностью
ималой погрешностью измерения.
Впроцессе измерения параметров вибраций важное значение имеет способ крепления датчика на поверхности детали или блока. На рис. 6.6 приведены частотные характеристики датчиков фирмы «Брюль и Кьер» в зависимости от способа их крепления. Привертывание датчика с помощью стальной шпильки до плотного прилегания установочной поверхности его к поверхности детали обеспечивает наилучшую частотную характеристику. При использовании других способов крепления резонансная частота датчика перемещается в сторону более низких частот. В условиях эксплуатации установка датчика с магнитной присоской в диагностических зонах двигателя удобна, однако приходится учитывать, что резонансная частота с 10 кГц (при креплении стальной шпилькой) смещается до 5 кГц, и, следовательно, без искажения будут регистрироваться вибрации только до 5 кГц.
139
Стр. 139 |
ЭБ ПНИПУ (elib.pstu.ru) |

аб
вг
Рис. 6.6. Частотные характеристики датчика при разных способах его крепления: а – стальной шпилькой; б – изолированной шпилькой; в – магнитной присоской; г – щупом
Использование щупа для присоединения датчика сохраняет линейную частотную характеристику в основном до 1 кГц.
7.ПРИМЕНЕНИЕ ДИНАМИЧЕСКИХ ПРОЦЕССОВ
ВВИБРОТЕХНИКЕ
Применение вибрационной техники позволяет коренным образом усовершенствовать традиционные технологические процессы, такие как движение, в том числе вверх по наклонному желобу; опорожнение бункера и его заполнение снизу; измельчение твердых тел и уплотнение смесей; превращение полужидких масс в твердые тела и придание сыпучему материалу свойств жидкости [10].
140
Стр. 140 |
ЭБ ПНИПУ (elib.pstu.ru) |