

Вероятностные методы расчета конструкций
..pdfоси эта величина мало отличается от нуля (рис. 3.4). Такие системы называются системами с высокими фильтрующими свойствами или узкополосными системами, которые пропускают главным образом составляющие спектра внешнего воздействия с частотами, близкими
к собственной частоте колеба- Рис. 3.4 ний (резонансный режим).
Свойством узкополосности пользуются довольно часто, так как оно позволяет значительно упростить расчетные формулы, не внося при этом погрешностей, имеющих практическое значение.
Ширину полосы пропускания системы , или, как еще говорят, эффективную полосу пропускания системы, можно вычислить, разделив площадь под графиком H (i ) 2 , равную
H (i ) 2 d , на значение H (i ) 2 при p0 :
0
H (i ) 2 d
|
0 |
|
|
. |
|
|
2 |
|
|||
|
|
H (i ) |
p |
||
|
|
|
|
0 |
|
Конструкции из металлов и даже из железобетона являются системами с высокими фильтрующими свойствами (узкополосными), поэтому многие машиностроительные конструкции могут быть отнесены к узкополосным динамическим системам.
Для рассматриваемого случая
H (i ) |
|
2 |
|
|
|
1 |
|
|
|
. |
(3.29) |
|
|
|
|
|
|
|
|||||
|
m |
2 |
|
2 2 |
2 |
2 |
|
||||
|
|
|
|
( p0 ) |
|
(2n ) |
|
|
|
||
91

Подставляя (3.29) и соотношение (3.27) в формулу (3.28), получим дисперсию перемещения:
2 |
1 |
|
|
H (i ) |
|
2 S f ( )d |
|
|||
|
|
|
||||||||
Dx x |
|
|
|
|
|
|
|
|
. |
(3.30) |
2 m2 |
( 2 p2 )2 |
(2n )2 |
||||||||
|
|
|
|
0 |
|
|
|
|||
Если воспользоваться свойством узкополосности системы |
||||||||||
и считать, что спектральная |
плотность |
S f ( ) – |
спокойная |
|||||||
функция, не имеющая разрывов и очень резких максимумов вблизи p0 , то произведение H (i ) 2 S f ( ) , входящее под знак
интеграла в формуле (3.28), будет существенно отлично от нуля только вблизи p0 . Поэтому, если пренебречь изменением
спектральной плотности воздействия в пределах полосы пропускания (см. рис. 3.4) и принять ее равной значению на частотеp0 , то формула (3.30) примет вид:
|
|
S f ( ) |
|
|
|
|
|
2 d . |
D 2 |
|
|
p0 |
|
|
H (i ) |
|
|
|
|
|
||||||
|
|
|||||||
x x |
|
2 4n2c2 |
|
|
|
|
||
|
|
|
|
|
|
|||
В качестве примера рассмотрим движение транспорта по неровной дороге. Нет надобности доказывать, что неровности всех видов автомобильных и железных дорог носят случайный характер. Поэтому все задачи определения транспортных нагрузок опираются на теорию случайных процессов.
Пример 3.3 [21].
Рассмотрим случайные поперечные колебания прицепа (рис. 3.5, а) массой m при движении его со скоростью v по дороге, характеризующейся заданной спектральной функцией неровностей. Будем считать, что точка крепления прицепа к автомобилю (точка О), находящаяся на расстоянии l от его центра тяжести, не имеет вертикальных перемещений, жесткость шин весьма велика по сравнению с жесткостью рессор с. Момент инерции массы прицепа относительно точки О равен J0. В рес-
92

сорах возникает вязкое трение с коэффициентом трения . Массой колес прицепа по сравнению с массой m можно пренебречь. При решении будем считать, что в результате статистических исследований получена спектральная плотность воздействия дороги на систему:
Sh ( ) |
|
av |
|
, |
2 |
2 |
)2 |
||
|
( |
bv |
|
где v – скорость движения; a, b – характеристики спектральной функции профиля дороги.
Рис. 3.5
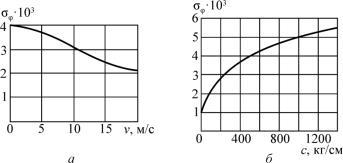
Определить среднеквадратичное отклонение угла колебаний и угловой скорости колебаний прицепа в зависимости от скорости движения. Провести анализ зависимости среднеквадратичного отклонения угла колебаний от жесткости рессоры (при заданной скорости движения).
Параметры системы: J0 = 5·104 кг·см·с2; l = 250 см; а = = 10 см2 /м; b = 25 1/cм2; с = 200 кг/см; = 10 кг·с/см.
93

Решение. Представим прицеп в виде схемы (рис. 3.5, б), причем h значительно меньше l (поворот на угол приводит
только к вертикальному смещению точки А). Тогда уравнение малых угловых колебаний системы можно записать в виде:
|
l2 |
|
cl2 |
cl h |
|
l h |
|
|
2 |
|
1 |
|
||
|
|
|
|
|
|
|
|
|
или 2n p0 |
|
|
(clh lh), |
||
|
|
J0 |
|
J0 |
J0 |
|
J0 |
|
|
|
|
J0 |
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
p |
2 |
|
cl2 |
; 2n |
l2 |
. |
|
|
|
|
|
|
|
|
0 |
|
J0 |
|
J0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Зависимость спектральной плотности выхода от спектральной плотности входа определяется зависимостью (3.27), т.е. в нашем случае
S ( ) H (i ) 2 Sh ( ),
где H (i ) 2 – квадрат модуля частотной характеристики систе-
мы, которая равна передаточной функции. Передаточная функция
|
H (i ) |
l |
|
|
c i |
|
. |
|
|
|
|||||
J |
0 |
|
(i )2 2n(i ) p2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H (i ) |
2 |
|
l |
|
|
2 |
c2 2 (i )2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||
|
|
|
|
|
|
|
|
|
|
2 |
|||||
|
|
|
J0 |
|
(i )2 2n(i ) p |
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
Подставим некоторые |
заданные |
значения переменных |
|||||||||||||
в выражение спектральной плотности воздействия дороги на систему:
Sh ( ) |
|
10v |
|
|
10v |
|
|
. |
|
(25v |
2 |
2 |
|
5v i |
2 |
|
|||
|
|
)2 |
|
|
|
2 |
|||
94
Находим дисперсию угла колебаний прицепа:
2 |
D |
1 |
|
H (i ) |
|
2 S |
( )d . |
||
|
|
||||||||
|
|
||||||||
2 |
|||||||||
|
|
|
|
|
h |
|
|||
|
|
|
|
|
|
|
|||
Рис. 3.6
График изменения среднеквадратичного отклонения угла колебаний в зависимости от скорости движения показан на рис. 3.6, а, а в зависимостиот жесткостирессорыс– нарис. 3.6, б.
3.2.2. Системы с n степенями свободы
Рассмотренные решения можно обобщить для случая динамической системы с n степенями свободы. Принципиальных затруднений при этом не возникает, но усложняется процесс вычислений.
Система дифференциальных уравнений движения системы имеет следующий вид:
n |
|
|
(3.31) |
(mij xi 2 ij xi cij xi ) fi (t) ( j 1,2, ..., n) , |
|||
|
|
|
|
i 1 |
|
|
|
где при i j mij |
mj , а при i j |
mij 0. |
|
При исследовании колебаний системы с n степенями свободы возможно несколько характерных случаев действия сил. Наиболее простой из них – это случай, когда все силы изменя-
95
ются по времени одинаково, дисперсии же сил могут быть разными. Другим случаем является вариант разных fi (t) , но статистически независимых между собой. Общим случаем и наиболее сложным является вариант, когда все силы fi (t) различны
и между ними существует сильная статистическая взаимосвязь. При решении первых двух вариантов используется метод главных координат [15, 17], который позволяет перейти от системы (3.31) к системе уравнений вида:
q |
2n q |
k |
p2 q |
k |
|
1 |
F (t) (k 1, 2, ..., n) , |
|
|||||||
k |
k |
k |
|
|
k |
||
|
|
|
|
|
|
Mk |
|
где pk – собственная частота колебаний; qk (t) – главные координаты, связанные с исходными координатами соотношением
n |
|
xi (t) qk (t)uik , |
(3.32) |
k 1
uik – амплитудное смещение i-й массы при k-й форме собственных колебаний; Mk – обобщенная масса системы при k-й форме собственных колебаний,
n |
|
Mk mi (uik )2 ; |
(3.33) |
i 1 |
|
Fk – обобщенная сила, |
|
n |
|
Fk (t) fk (t)uik . |
(3.34) |
i 1
Определение вероятностных характеристик решения уравнений (3.31) было рассмотрено ранее, следовательно, используя связь (3.32), можно найти вероятностные характеристики исходной системы.
Пример 3.4. Рассмотрим балку с двумя сосредоточенными массами. На массу m2 ( m2 m1 m ), расположенную на расстоянии 2l от заделки, внезапно подействовала случайная сила
96

f (t) f0 H (t) , где H (t) – функция Хевисайда (рис. 3.7). Вероятностныехарактеристикислучайной силы f0 известны ( mf0 , Df0 ).
Рис. 3.7
Определить математическое ожидание и дисперсию максимального нормального напряжения в заделке.
Решение. Уравнения колебаний:
y1 |
11 |
( m1 y1 ) 12 ( m2 y2 ) 12 f0 H (t); |
|
||
|
|
|
|
|
(3.35) |
|
|
|
|
f0 H (t). |
|
y2 |
21 ( m1 y1 ) 22 |
( m2 y2 ) 22 |
|
||
Определим коэффициенты влияния:
|
|
l3 |
; |
|
|
5l3 |
; |
|
|
8l3 |
. |
|
|
22 |
|
||||||||
11 |
|
3EI |
|
12 |
|
6EI |
|
|
3EI |
|
|
|
|
|
|
|
|
|
|
|
Найдем собственные частоты колебаний системы:
p 0,585 |
EI |
; |
p |
|
3,881 |
EI |
. |
ml3 |
|
|
|||||
1 |
|
|
2 |
|
ml3 |
||
Собственные формы колебаний:
u1 (u11;u21 ) (1; 3,132); u2 (u12 ;u22 ) (1; 0,319).
Перейдем к главным координатам по формуле (3.32):
y1 u11q1 u12q2 ; |
y2 u21q1 u22q2 , |
(3.36) |
где qk – главные координаты; uik – смещение i-й массы при k-й форме собственных колебаний.
97

Уравнения движения системы (3.35) с учетом (3.33) и (3.34) в главных координатах примут вид:
|
|
|
2 |
|
|
|
|
u j1 f j |
|
|
2 |
|
j 1 |
|
p1 q1 |
|
2 |
|
|
q1 |
|
|||
|
|
|
u2j1mj |
|
|
|
|
j 1 |
|
|
|
|
2 |
|
|
|
|
u j 2 f j |
|
|
2 |
|
j 1 |
|
p2 q2 |
|
2 |
|
|
q2 |
|
|||
|
|
|
u2j 2mj |
|
|
|
|
j 1 |
|
|
(1 3,132) f0 H (t) |
|
0,382 f0 |
H (t); |
|
m(1 3,1322 ) |
|||||
|
|
m |
|
|
(1 0,319) f0 H (t) |
|
0,618 f0 |
H (t). |
|
m(1 0,3192 ) |
|
m |
|
Решая полученные уравнения при нулевых начальных условиях, получим:
q |
|
0,382 f0 |
(1 cos p t); |
q |
|
|
0,618 f0 |
(1 cos p |
t). |
1 |
|
mp2 |
1 |
|
2 |
|
mp2 |
2 |
|
|
|
1 |
|
|
|
|
2 |
|
|
Определяем перемещения масс при колебаниях:
y (t) |
0,382 f0 |
(1 cos p t) |
0,618 f0 |
(1 p |
|
t); |
||
1 |
|
mp2 |
1 |
mp2 |
2 |
|
||
|
|
|
1 |
|
2 |
|
|
|
y |
|
(t) |
1,196 f0 |
(1 cos p t) |
0,191 f0 |
(1 p |
t). |
|
|
2 |
|
mp2 |
1 |
mp2 |
2 |
|
|
|
|
|
1 |
|
2 |
|
|
|
Изгибающий момент в заделке:
Ml( m1 y1 ) 2l( m2 y2 f0 )
f0l(2,774cos p1t 0,236cos p2t 2) F(t) f0 .
Максимальное напряжение в заделке max M F(t) f0 .
Wx Wx
Математическое ожидание и дисперсия этого напряжения:
m |
|
F(t) |
m |
; |
D |
|
F 2 (t) |
D |
. |
max |
|
W |
|
f0 |
max |
W 2 |
|
f0 |
|
|
|
x |
|
|
|
|
x |
|
|
98

Считая, что max распределено по нормальному закону, находим максимально возможное напряжение в заделке:
max( |
|
) |
F(t) |
(m |
f0 |
3 |
). |
max |
|
||||||
|
|
Wx |
|
f0 |
|||
|
|
|
|
|
|
||
Пример 3.5. Рассмотрим ту же балку с двумя сосредоточенными массами. На массы m1 и m2 ( m2 m1 m ) внезапно подей-
ствовали случайные силы f1 (t) и f2 (t) (рис. 3.8). Определить
математическое ожидание и дисперсию смещения каждой из масс, если известны вероятностные характеристики внешних сил.
Рис. 3.8
Решение. Уравнения движения масс:
y1 |
11 |
( m1 y1 ) 12 ( m2 y2 ) 12 f1 (t); |
|
||
|
|
|
|
|
(3.37) |
|
|
|
|
f2 (t). |
|
y2 |
21 ( m1 y1 ) 22 |
( m2 y2 ) 22 |
|
||
Рассмотрим различные варианты действия внешних сил. 1. Пусть внешние силы одинаково изменяются во времени,
но отличаются дисперсиями, т.е.
fi (t) Fi (0) f (t) ( i 1,2 ),
где Fi (0) – стандарт силы fi (t); f (t) – стационарная случайная
функция времени.
Здесь, как и в предыдущей задаче, удобно использовать метод главных координат. Переходя к уравнениям движения системы в главных координатах, получим:
99

|
|
|
2 |
|
|
|
|
u j1 f j |
|
|
2 |
|
j 1 |
|
p1 q1 |
|
2 |
||
q1 |
||||
|
|
|
u2j1mj |
|
|
|
|
j 1 |
u11 f1 (t) u21 f2 (t) m(1 u212 )
|
|
F1 (0) 3,132F2 (0) |
f |
(t) R f (t); |
|
||||||
|
|
|
|
|
|||||||
|
|
m(1 3,1322 ) |
|
|
1 |
|
|||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
u j 2 |
f1 |
u12 |
f1 (t) u22 f2 (t) |
|
|||
|
|
2 |
|
j 1 |
|
|
|
|
|||
|
p2 q2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
m(1 u222 ) |
|
||||
q12 |
2 |
|
|
|
|
|
|||||
|
|
|
|
u j 2mj |
|
|
|
|
|||
j1
F1 (0) 0,319F22 (0) f (t) R2 f (t). m(1 0,319 )
Для определения коэффициента передачи k-й формы в стационарном режиме положим f (t) ei t , а qk (t) Hk (i )ei t .
Поскольку силы трения в задаче отсутствуют, то матрица передаточных коэффициентов имеет диагональный вид:
Hk (i ) pk2 Rk 2 .
Перемещение масс при колебаниях (3.36)
yi (t) u2ik Rk |
2 |
ei t u2ik Rk |
2 f (t). |
|||
2 |
|
|
2 |
|
|
|
k 1 |
( pk ) |
k 1 |
( pk ) |
|
||
Из полученного соотношения следует, что коэффициент передачи для координаты yi
H yi |
(i ) u2ik Rk |
2 . |
|
2 |
|
k 1 ( pk )
100