


|
|
|
|
|
M 2 |
= t 2 +u2 . |
|
|
||||
тоді |
|
|
|
2 |
|
|
|
а |
=2 |
6 |
|
|
Якщо |
|
|
6t = u, |
|
, |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
2 |
= |
u |
|
+u |
2 |
= |
37u |
=1.03 u |
2 |
, |
|
|
36 |
|
|
36 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
а
M =1.01×u.
Або
M 2 = t 2 +36t 2 = 37t 2 .
I
M = 6.08 ×t.
Допустима відносна похибка виражається розглянутою досі формулою
ML = T1 ,
(13)
(14)
(15)
тут М – середня квадратична похибка положення кінцевого пункта ходу, L – довжина ходу, T
– знаменник відносної нев’язки.
Підставивши (13) у(1 5), отримаємо допустиму відносну похибку виражену через поперечний зсув ходу
|
u |
= |
1 |
|
, |
(16) |
||
|
L |
1.01×T |
|
|||||
і звідси |
|
|
L |
|
|
|
||
|
u = |
|
|
. |
(17) |
|||
|
1.01×T |
|
||||||
|
|
|
|
|
|
|||
2.5. Розрахунок допустимої величини випадкової похибки на окреме джерело вимірювання горизонтальних кутів для ходу з ув’язаними кутами.
Згідно із (6) для ходуз попередньо ув’язаними кутами поперечний зсув дорівнює
|
|
|
|
m′β′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
u |
= |
L |
|
|
n +3 |
. |
|
(18) |
||||||||||||||
|
ρ′′ |
|
12 |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Розв’яжемо (18) відносно m′β′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′′ |
|
|
|
′′ |
|
|
|
|
|
12 |
|
|
|
|
|
|
||||||
|
= ρ |
|
L |
|
|
|
n +3 . |
|
(19) |
||||||||||||||
|
mβ |
|
|
|
|
||||||||||||||||||
Підставимо у (19) замістьuйого значення із (17), матимемо: |
|
||||||||||||||||||||||
|
|
|
ρ′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
m′β′ = |
|
|
|
|
|
|
12 |
|
|
|
|
. |
(20) |
||||||||||
1.01×T |
|
|
|
n +3 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Для ходуполіґонометрії4 класу, з такими параметрами n= 15; T= 25000 матимемо |
|
||||||||||||||||||||||
|
206265 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
m′β′(Сумарне) = |
|
|
|
|
|
12 |
|
= 6.7". |
|
||||||||||||||
25000×1.01 |
18 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
Як видно з формули (18), навіть для однаковоїдовжин ходів, для ходу з більшою кількістю сторін поперечний зсув u зростатиме.Отже, для того щоби поперечний зсув не
зростав, m′β′має бути меншим (точнішим). Нагадаємо, що Інструкція з топографічного
знімання допускає mβ(Сумарне) = 3", для того щобмати запас точностідля похибок, яківажко врахувати, наприклад, бокову рефракцію.
4
Для однакового впливу кожного з шести джерел випадкових похибок на результати вимірювання окремого кута, згідно із (5) допустима величина похибки на окреме джерело дорівнюватиме
m′β′ |
(Окр.джерело) = |
m′β′ |
(Сумарне) |
= |
6.7′′ |
= 2.7′′. |
(21) |
||||
|
|
|
|
|
|
|
|||||
|
6 |
|
6 |
|
|||||||
|
|
|
|
|
|
|
|
||||
Як бачимо, для поліґонометричних ходів які прокладають топографічними електронними тахеометрами с.к. похибка вимірювання кута що припадає на одне джерело більша (2.7″) у порівнянні із класичними розрахунками поданими у підручнику (1.9″), що значно полегшує прокладання таких ходів.
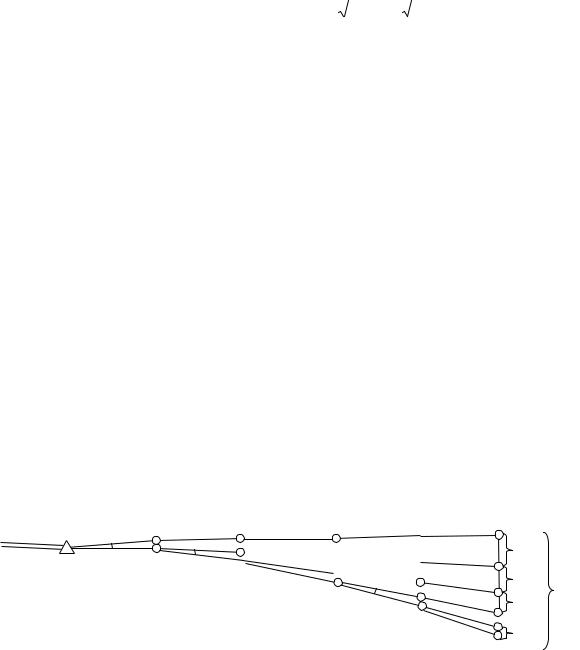
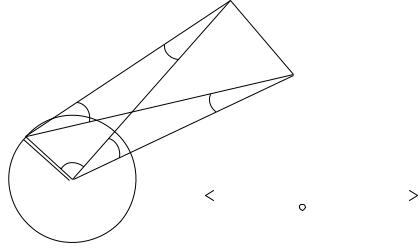
2.6. Розрахунок допустимої величини систематичної похибки виміру окремого кута у витягнутому висячому ході
Нехай у витягнутому, висячому, рівносторонньому ході |
n сторін. Вплив однакових |
|||||||||||||||||
систематичних похибок m′β′ сист |
виміру кутів, на положення кінцевої точки ходу показано на |
|||||||||||||||||
рис. 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u′, |
|
|
|
Сумарний поперечний зсув для висячого ходу позначимо через |
і його значення |
|||||||||||||||||
знайдемо на основі рисунка 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
′′ |
|
|
|
′′ |
сист |
|
|
|
′′ |
|
′′ |
сист |
|
|
|
||
u′ = |
mβ сист |
S n + |
mβ |
S(n −1)+ |
mβ сист |
S(n −2)+...+ |
mβ |
S(1) . |
(23) |
|||||||||
|
|
|
|
|
ρ′′ |
|||||||||||||
|
ρ′′ |
|
|
|
ρ′′ |
|
|
ρ′′ |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Або: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
′ |
= |
m′β′ сист |
S[n + (n −1)+ (n − 2)+... +1]. |
|
|
|
(24) |
||||||||
|
|
|
ρ′′ |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||
У квадратних дужках формули (24) маємо суму натурального рядучисел від n
відомо сума такого ряду чисел дорівнює |
|
∑(1+...+n) = n(n +1). |
|
n |
|
1 |
2 |
до 1. Як
(25)
S S S S  S
S
mβсист mβсист 

 mβсист
mβсист 

mβсист
mβсист
u1' |
|
|
u2' |
u' |
|
u3' |
||
|
||
un |
|
Рис. 1. Вплив, однакової систематичної похибки m′β′ сист виміру кутів, на положення кінцевої точки витягнутого, висячого, рівностороннього поліґонометричного ходу.
З урахуванням (25) формула (24) матиме вигляд
|
′ |
|
|
m′β′сист |
n(n +1) |
|
|||
|
|
|
|
|
|
|
2 . |
(26) |
|
u |
= |
|
|
ρ′′ S |
|||||
|
|
|
|||||||
Згідно із (17) |
|
|
|
|
L |
|
|
||
|
u′ |
|
|
|
|
||||
|
= |
|
. |
|
|
||||
|
1.01×T |
|
|
||||||
Прирівняємо праві частини рівнянь (17) і (26)
5
|
L |
= |
m′β′сист |
S |
n(n |
+1) |
. |
||
1.01×T |
|
ρ′′ |
|
2 |
|||||
|
|
|
|
|
|||||
S n=L , іскоротивши це значення управій і лівій частинах рівняння матимемо |
|||||||||
|
m′β′сист = |
|
2ρ′′ |
|
. |
|
|||
|
1.01×T (n |
+1) |
(27) |
||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
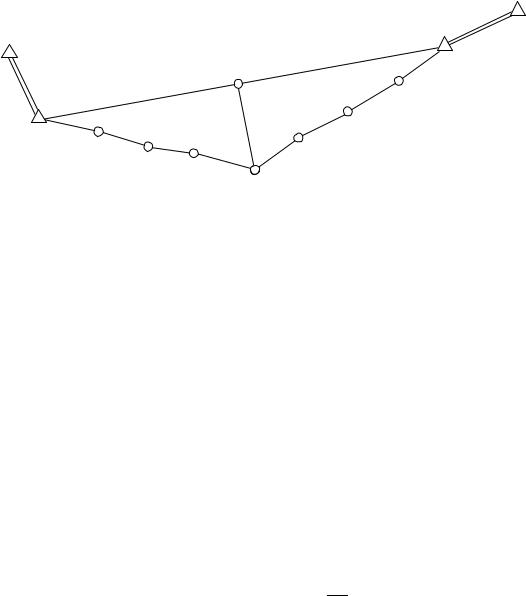
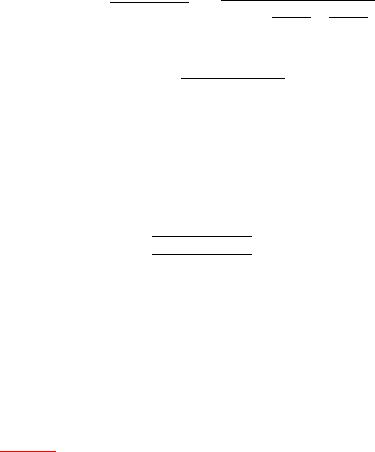
2.7. Розрахунок допустимої величини систематичної похибки виміру окремого кута у витягнутому ході з попередньо ув’язаними кутами
Якщо кути ходупопередньо виправлені за нев’язку, то найбільший поперечний зсув ходу буде уйого середині. Якщо вплив похибок однаковий увсьомуході, то ймовірно, що
αК
αП
|
u1 |
u2 |
n2 |
= n |
|
|
|
|
|
|
2 |
n = n |
|
|
|
|
|
1 |
2 |
Pn |
|
|
|
|
+1 |
|
|
||
|
|
2 |
|
|
|
Рис. 2.22. Поперечний зсув середньої точки ходу.
поперечний зсув u1 від початкуходудорівнюватиме поперечномузсуву u2 від кінця ходу.
u1 = u2 = u'.
Отже, якщо кількість сторін уцілому ході n, то кількість сторін укожному із ходів
n |
= n |
2 |
= n . |
|
|
|
|
|
|
|
|
|
(28) |
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Тодіформула (27) матиме вигляд |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
m′β′сист = |
|
2ρ′′ |
|
|
|
|
4ρ′′ |
|
|||
|
|
|
|
|
|
= |
|
|
|
. |
(29) |
|||
|
|
|
|
n |
|
1,01×T (n + 2) |
||||||||
|
|
|
1,01 |
×T |
2 |
+1 |
|
|
|
|
|
|||
Для n = 15 іТ=25000, матимемо: |
|
|
|
|
|
|
|
|||||||
|
|
206265 |
|
4 |
|
|
|
|||||||
|
|
Сумарне m′β′сист = |
|
|
=1,9′′, |
|
||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
25000×1,01 17 |
|
|
|
|||||
а випадкова, як ми розглядували досі – 6,7ʺ. Як бачимо, вплив систематичних похибок для ходумає бути учотири рази менший, ніж випадкових.
Розрахуємо допустимий вплив на хід одного джерела систематичної похибки
Одне джерело m′β′сист = 16.9 = 0,32′′,
а випадкова, як ми розглядували досі– 2,7ʺ. Отже на одне джерело допуск систематичних похибок має бути меншим удев’ять разів ніж випадкових похибок. Знешкоджувати такімалі систематичніпохибки досить складне завдання.
6
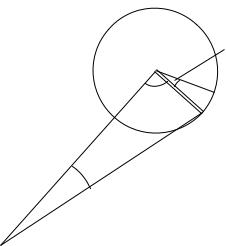
2.8. Похибка редукції
Допустимо,щопідчасвимірюваннянапряму AB (рис. 2.8.1)візирна маркавстановлена не в точці B (над центром геодезичного знаку), а помилково, в точці B′. Лінійна величина
редукції– e . Кутова величинаредукції–кут α .Сторони S1 та S1′ трикутника ABB′ практично рівні. З цього трикутника, оскільки кут α малий, можемо записати:
|
|
|
|
|
|
|
α′′ = ρ′′ |
esin x |
. |
|
|
|
|
|
|
|
|
(2.8.1) |
|||||
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Точка B′, рухаючись по колурадіус омe може займати різні положення. Кут x буде |
|||||||||||||||||||||||
змінюватися, разом з кутомα′′. Для x = 0° та x = 180°, α′′ |
= 0. Для x = 90° та x = 270°, α′′ |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
набуває максимального значення. Нехай |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
точка переміщатиметься на сталий кут dx ; |
|||||||||||||
|
|
|
B |
|
|
dx |
|
|
тоді n – кількість положень точки B′ |
||||||||||||||
|
|
|
|
e |
|
|
|
знайдемо за формулою: |
|
|
n = 2π |
|
|||||||||||
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. (2.8.2) |
||
|
|
|
|
|
|
B' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx |
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
Кожному положенню точки |
B′ буде |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
відповідати похибка редукції в деякому |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
α |
|
|
S1' |
|
|
|
|
|
|
напряміi . |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Квадрат |
|
|
середньої |
|
квадратичної |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
похибки |
редукції в i -тому |
напрямі |
|||||||||||
|
|
|
|
|
|
|
|
|
|
дорівнюватиме: |
|
|
|
|
|
||||||||
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ′′2e2 |
sin2 x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mα2і |
= |
|
S |
2 |
|
. |
(2.8.3) |
|
Рис. 2.8.1. Редукція одного напрямку. |
|
|
|
|
|
|
|
|
1 |
|
|||||||||||||
|
|
|
|
|
|
|
|
2π |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Або: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mα2 |
|
ρ2 e |
2 |
|
2n |
|
|
. |
|
|
|
|
|
|
|
(2.8.4) |
|
|
|
|
|
|
|
= |
|
i |
|
∫sin2 x dx |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
S12 2π |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
i |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
||||
2n |
2 |
x |
|
− |
1 |
sin 2x + |
1 |
|
|
− |
1 |
sin 2x + |
1 |
|
=π. Якщо в перший член у |
||||||||
Інтеграл ∫sin |
|
dx = |
4 |
2 |
x |
− |
4 |
2 |
x |
||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
дужках підставити нижню границю х = 0, то він дорівнюватиме нулю, а в |
|
другий член у |
|||||||||||||||||||||
дужках, підставимо верхню границю 2π, то отримаємо – π. Тому формула (2.8.4) набуде для першого напряму вигляду:
mα2 = |
ρ2e |
2 |
. |
1 |
|||
2 |
|||
1 |
2S1 |
|
|
|
|
|
|
Для другого напрямукута з вершиною в точці A (для довжиниS2 ) похибка:
|
mα2 |
= |
ρ2 |
e |
2 |
. |
|
|
|
|||
|
|
|
|
|
|
2 |
|
|
|
|||
|
|
2S22 |
|
|
|
|
||||||
|
2 |
|
|
|
|
|
|
|
||||
Сумарна квадратична похибка редукції: |
|
|
|
|
|
|
|
|
|
|
||
mρ2 = mα2 |
+ mα2 |
|
|
ρ2 |
|
e2 |
|
e2 |
|
|||
= |
|
|
|
|
|
1 |
|
+ |
2 |
. |
||
2 |
|
|
S12 |
S22 |
||||||||
1 |
2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.8.5)
(2.8.6)
(2.8.7)
Дляe1 = e2 = e іS1 = S2 = S , матимемо:
|
ρ |
2 |
e |
2 |
|
2 |
|
′′ |
|
|
mρ2 = |
|
|
|
, або mρ″ = |
ρ e |
. |
(2.8.8) |
|||
|
|
2 |
|
S 2 |
|
|||||
|
|
|
|
|
|
S |
|
|||
Як бачимо з формули (2. 8.8), похибка редукції прямо пропорційна величині лінійної редукції іобернено пропорційна довжинам лінійS , що створюють кут.
7
Дляe = 10мм та мінімальній допустимій довжиністорони ходуполіґонометрії4 класу
S = 250 м, m′ρ′ = 0,01м 206265" 8" ; таке значення не допустиме. За нашими розрахунками
250
за формулою (21) допустиме значення окремого джерела кутової похибки (в даному випадку похибка редукції) m′ρ′ = 2,7". Знайдемо допустиму лінійну похибку центрування візирної
марки, розв’язавши формулу відносно e :
е = |
m′ρ′ S |
. |
(2.8.9) |
доп |
ρ′′ |
|
Мінімальна сторона S поліґонометрії4 кл згідно зІнструкцією 250 м. Тоді:
едоп = 2,2062657 250 м =3.3 мм. .
Оптимальна довжина сторони ходу S = 500 м. едоп = 6.5 мм. Виходячи з розрахунків можна зробити два висновки:
1.Длякоротких сторін центрування марки слід виконувати значно точніше, ніж для довгих сторін;
2.Забезпечити точність центруваннямарки, якавстановленанаштативіз точністю3.3 мм можна застосовуючи оптичний центрир.
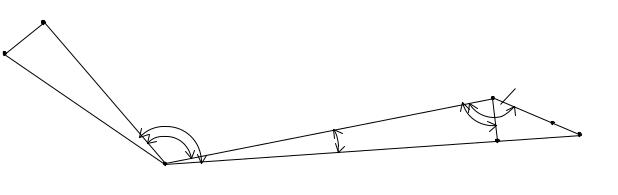
2.8.1. Похибка у вимірюванні кута через редукцію візирної цілі
(Спрощене виведення формули)
А
lA |
β´ |
|
С |
Θ |
l |
|
|
К |
|||
|
β |
|
|||
|
|
|
|
l´ |
С´ |
|
|
|
|
|
|
|
В |
|
|
|
|
l – лінійний елемент редукції; Θ – кутовий елемент редукції.
Рис. 2.8.1.1. До похибки редукціїодного напряму.
Нам потрібно |
виміряти кут |
АВС =β.Приймемо, що теодоліт в т. В зцентрований |
||||||||
безпомилково. |
|
= |
|
− |
BC = S; |
р |
– похибка через редукцію у напрям – кут СВС´. |
|||
Позначимо |
|
|
||||||||
Якщо візирна ціль зцентрована не над т.С, а над т.С´, то в результатівиміряємо кут |
||||||||||
β´.Знайдемо похибку |
р |
′ |
|
. |
|
|
|
|
||
|
|
|
|
|
||||||
Для обчислення поправки за |
|
|
р вимірюють кут ВСС´= Θ. |
|||||||
|
відрізок СС´=l; |
|
редукцію унапрям |
|
||||||
|
|
|
||||||||
|
|
|
|
|
|
|
||||
Проведемо перпендикуляр до лініїВС в т.С, до перетинуз лінією ВС´ іпозначимо його СК = l´. Зважаючи на те що відрізок l у сотні разів менший від сторони S, можна практично
безпомилково прийняти, що кут в точціК теж є прямим. Тоді
′ = ∙cos(Θ − 90°) = ∙ Θ;
Із трикутника CBK
8

|
|
|
|
(напр) |
= |
´; |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Підставивши замість l’ його значення виражене через lотримаємо |
||||||||||||||||
|
|
( |
) = |
|
|
|
= |
|
|
|
|
|
|||||
|
|
|
|
напр |
|
|
∙ ´ |
|
|
∙ ∙ Θ |
. |
|
|
(1) |
|||
|
Як бачимо із формули (1), для всіх інших однакових даних, похибка у напрям через |
||||||||||||||||
похибкуредукції візирноїцілі тим більша, чимменше S. |
|
|
|
|
|||||||||||||
|
Поправку за редукцію обчислюють у кожний напрям, а поправку у кут (за редукцію |
||||||||||||||||
візирних цілей) як суму(різницю) цих поправок. |
|
|
|
|
|
|
|
|
|
||||||||
|
Знайдемо lіз формули (1) |
|
(напрямΘ )∙ . |
|
|
|
|
|
|
||||||||
о |
Як видно з рис. та формули (2),= |
|
|
|
|
(2) |
|||||||||||
|
∙ |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
найбільший вплив на напрям ця похибка матиме для Θ |
|||||||||||||||
|
І для середньої довжини лінії 500 м, = |
|
|
|
|
|
|
|
|
|
(3) |
||||||
= 90 . Тоді |
|
|
|
|
|
∙ . |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
похибкацентруванняодногонапряму, якщо інший |
|||||||||||||
|
|
2.7″∙ 500000 |
|
|
|
|
|
|
|
|
|||||||
|
безпомилковий дорівнюватиме |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
206265 |
|
|
|
= 6.5 мм . |
|
|
|
||||||||
|
Для мінімальноїдовжини лінії 250 м |
|
|
|
2.7×250000 |
|
|
|
|
||||||||
|
Якщо для другого напряму редукція l |
|
|
|
|
|
206265 |
|
|
|
|
|
|||||
|
Aбуде спрямована так само як l у точціС, то |
||||||||||||||||
|
|
= |
|
|
|
|
|
|
= 3.3 мм. |
||||||||
похибка увимірюваннікута дорівнюватиме сумі похибок унапрями. Тобто |
|||||||||||||||||
|
( ) = |
√2 ∙ ( |
|
|
|
|
) |
|
( |
|
) = |
√2 |
|||||
|
кут |
|
|
|
|
напрям |
; |
|
|
напрям |
|
(кут) |
. |
||||
Отже для того щоби похибка укут не перевищувала допуску, марки потрібно центрувати точніше. Тепер,задаючись похибкоювимірюваннякута, через похибкууредукції,
можна знайти похибкуцентрування візирних цілей. |
|
|
|
|
|
|
|
||||||||||
|
(щоби) = 2.7" ( |
|
|
) = |
√2 = 1.9" |
|
|
|
|
|
|
|
|||||
Наприклад: |
S |
= 500 м. Похибка на одне джерело згідно з нашими розрахунками |
|||||||||||||||
|
|
|
|
|
|
|
|
2.7" |
|
|
|
|
|
|
|
1.9" |
|
(формула 21) |
|
кут |
. |
|
напрям |
|
. Обчислимо з якою точністю потрібно |
||||||||||
центрувати марки |
|
похибка |
вимірювання напряму не перевищувала |
. Згідно із (3) |
|||||||||||||
|
|
|
|
= |
|
∙ |
= |
1.9 × 500000 |
= 4.6 |
мм |
. |
|
|||||
|
|
|
|
|
|
206265 |
|
|
|
|
|||||||
Для мінімальноїдовжини лінії 250 м |
|
1.9×250000 |
= 2.3 |
мм |
. |
|
|
||||||||||
Для того, щоби мати запас точності = |
206265 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
на інші, важко враховувані похибки, інструкція |
||||||||
вимагає центрувати візирні цілі з похибкою 1 мм.
2.9. Похибкау вимірюванні кута через похибку центрування теодоліта
Допустимо, під час вимірювання кута теодоліт встановлено поза центром знаку, тобто в точці A , а не в точці D . Тоді буде виміряний кут A , а не кут D (рис.2.9.1). Нехай точка A переміщається по колу радіуса e′. Звернемо увагу на те, що на відмінувід впливуредукції, вплив центрування теодоліта завжди впливає на кут, що вимірюється, де б не знаходилася на
9
колі точка A .Розглянемо трикутник |
AMB та DMC . Кути в точці M в них однакові. Тому |
||||||||||||||
кути: |
|
|
|
|
|
|
|
D + β = A +α . |
(2.9.1) |
||||||
Або: |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
D − A =α −β = z . |
(2.9.2) |
|||||||||
З трикутника ABD знайдемо: |
|
||||||||||||||
|
|
|
sinα |
= sin x . |
|
||||||||||
|
|
|
|
|
|
|
|
(2.9.3) |
|||||||
|
|
|
|
|
|
|
|
e′ |
S1′ |
|
|||||
Оскільки кут α малий і S1′ ≈ S1 , тодінапишемо: |
|
||||||||||||||
|
|
|
|
|
|
α′′ = e′ ρ′′sin x . |
(2.9.4) |
||||||||
Також, з трикутника ACD напишемо: |
S1 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
β′′ = e′ρ′′sin(x + D). |
(2.9.5) |
||||||||
|
|
|
|
|
|
|
|
|
S2 |
|
|||||
Якщо точка A такожпереміщається по колурадіуса e′ з інтервалами dx , тодікількість |
|||||||||||||||
установлень теодоліта буде n = |
2π |
|
, тому для кожного положення точки |
A ,враховуючи |
|||||||||||
dx |
|||||||||||||||
(2.9.2), можемо записати |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
m2 |
= m2 |
= m2 |
+m2 . |
|
||||||||
|
|
|
|
|
(2.9.6) |
||||||||||
|
|
|
|
|
|
ц |
z |
α |
β |
|
|||||
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|||
|
|
S1' |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
C |
|
|||||
|
|
S1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
β |
|
|
|
|
|
|
||
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
||
A |
|
S2 |
|
|
|
|
|
|
|
||||||
|
D |
|
|
|
|
|
|
|
|||||||
|
x |
|
|
|
|
|
|
|
|||||||
e' |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
D |
|
б |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
С |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
S1 |
|
|
S2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
Рис. 2.9.1. Установлення теодоліта поза центром.
За аналогією з похибкою редукції запишемо (2.9.6) в розгорнутому вигляді:
2 |
|
ρ |
′′2 |
′2 2π |
sin |
2 |
x |
|
sin |
2 |
(x + D) |
|
||||
|
|
e |
|
∫ |
|
|
|
|
dx . |
|||||||
mц |
= |
|
|
|
S |
2 |
|
+ |
|
|
|
S 2 |
||||
|
2π |
|
|
|
|
|
||||||||||
|
|
|
|
|
0 |
|
1 |
|
|
|
|
|
2 |
|
||
Після інтегрування та деяких перетворень матимемо |
|
|||||||||||||||
|
|
|
|
m2 |
= |
|
e′2 ρ′′2 |
|
c2 |
, |
|
|||||
|
|
|
|
2 |
S 2 |
S 2 |
|
|||||||||
|
|
|
|
ц |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
де c – віддаль між точками B та C (див. рис. 2.9.1, б)
(2.9.7)
(2.9.8)
10
|
Для гострих кутів A іD , значення |
c |
мале. |
|
Для витягнутого ходу A = |
D = 180°, |
|||||||||||
c = S |
+ S |
2 |
. Якщо |
S |
= S |
2 |
= S , тоді |
c = 2 S , |
а c2 |
|
= 4 S 2 . У цьомувипадку (2. |
9.7) набуде |
|||||
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
вигляду: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m2 |
= |
e′2 ρ′′2 |
4S 2 . |
(2.9.9) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
ц |
|
|
|
2S 4 |
|
|
|
|
|
|
Або: |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
e′ρ′′ |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
m |
= |
|
|
. |
(2.9.10) |
||||
|
|
|
|
|
|
|
|
2 |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
ц |
|
|
S |
|
|
|
|
||
Порівнюючи формули (2.8.9) та ( 2.9.10), бачимо, що вплив похибок центрування на
виміряний кут в 
 2 більший, ніж вплив редукції візирної цілі. Поставимо вимогу, щоб mц = mp , тобто:
2 більший, ніж вплив редукції візирної цілі. Поставимо вимогу, щоб mц = mp , тобто:
ρ′′ eS′ 
 2 = ρ′′ Se
2 = ρ′′ Se
Значить: e′ 
 2 = e , або:
2 = e , або:
|
′ |
|
e |
|
||||
|
|
|
|
|
|
|
||
e |
= |
2 . |
(2.9.11) |
|||||
|
||||||||
Дляe відповідно 3.3 мм і6.5 мм, будемо мати e′ = 2.3 мм, e′ = 4.6 мм. Таким чином:
1) теодоліт необхідно центрувати точніше, ніж візирні марки;
2)обов’язково використовувати оптичні центрири.
2.9.1.Похибка у вимірюванні кута через похибку центрування теодоліта
(Спрощений метод виведення)
Потрібно виміряти кут ВОА= β (рис. 2.9.1). Нехай візирні цілі у тт. А і Взцентровані безпомилково.
B
 SB
SB
A
SA 
|
|
β |
|
|
|
О |
|
|
|
β´ |
||||
|
|
|
β
О´ |
Рис. 2.9.1. Похибка у вимірюванні кута через похибку центрування теодоліта.
Якщо теодоліт зцнентровано не над точкою О, а помилково над точкою О´, то замість |
|||||||||||||
Залежно |
від |
положення т. = |
|
− |
= + |
|
|||||||
кута β буде виміряно кут |
β´. Похибка вимірювання кутадля розглядуваного рисунка |
||||||||||||
|
|
|
|
|
|
′ |
|
|
|
|
|
|
. |
|
|
|
|
|
О´ відносто т.О, похибка у вимірюванні кута може |
||||||||
дорівнювати як сумі, так і різниці похибок увиміряні напрями. |
|||||||||||||
Приймето такі позначення: |
|
|
|
|
|
|
|
|
|||||
|
ОО´=l, |
|
OB = SB, OA = SA; |
кут BOO´= ΘB, AOO´= ΘA. |
|||||||||
Проведемо із т.О’ лінії, паралельні ОА і ОВі напрями на тт. А і В. Отримані кути між |
|||||||||||||
теодоліта. Кут |
|
і |
|
будутьпохибками увідповіднінапрямичерезпохибкуцентрування |
|||||||||
циминапрямами |
|
|
|
||||||||||
|
ОАО´ теж дорівнюватиме |
|
|
, |
як різносторонній при перетині двох |
||||||||
|
|
|
|
|
|
|
11 |
|
|
. |
|
||
|
|
|
|
|
|
|
´= |
|
|
|
|
||
паралельних прямих третьою. Аналогічно ОВО |
|
|
|
|
|||||||||
Побудуємо перпендикуляр в т.О до лініїОА іпроведемо його до перетинуз лінією О´А
в т.К. через цещо відрізокОК усотніразів менший віддовжини сторони,вважатимемощо він |
||||||||||||||||||||||||||||
Похибка унапрям ОА |
|
= ∙ |
( |
− 90 ) |
= ∙ |
|
|
|
|
|
||||||||||||||||||
перепендикулярний і до АО і до АО’.За цієї умовивизначимо lA: |
|
. |
|
|
||||||||||||||||||||||||
Аналогічно похибка унапрям |
= |
|
|
|
∙ |
|
= |
° |
|
∙ |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∙ |
|
|
. |
|
|
|
|
|
|||||
|
|
дорівнюватиме |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
= |
|
|
|
∙ |
|
= |
|
|
|
|
∙ |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∙ |
|
|
. |
|
|
|
|
|
|||||
|
|
|
|
ОВ дорівнюватиме |
|
|
|
|
|
|
|
|
|
|||||||||||||||
Похибка увимірюваний кут для розглядуваного рисунка буде |
|
|||||||||||||||||||||||||||
|
= |
|
2 + 2 |
= |
2 |
|
∙ 2 |
22 |
+ |
22 |
|
(1) |
||||||||||||||||
|
|
|
|
= 2 |
22 + 22 |
|
|
|
|
|
|
|
||||||||||||||||
Згідно з (1) можна розрахувати точність центрування |
|
|
|
|
|
|
|
|||||||||||||||||||||
Приймемо що А = В |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
. |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
А |
|
|
|
|
|
В |
|
|
|
|
° |
. |
|
|
|
|
|
|
|
|
|
|||||
|
класу |
|
= |
= |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Обчислимо для 4-го |
|
|
поліґонометрії |
|
|
360 − |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Для S = 250 м |
|
|
SA = SB = 500 м; |
ΘА = ΘВ |
= 90°; |
|
|
|
||||||||||||||||||||
|
|
l = 206265 |
|
(2 |
|
90) |
= 4,6 |
|
|
|
|
|
|
|||||||||||||||
mβ – похибка на одне джерело дорівнює 2.7" (21) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
2,72×5000002 |
|
|
|
|
|
|
мм. |
|
|
|
|
||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
=2,3 мм.
Для того, щоб мати запас точності Інструкція рекомендує центрувати прилади з похибкою 1 мм.
m2 = |
e′2 ρ′′2 |
|
c2 |
|
|
|
|
|
|
||||||||
|
= |
2 |
|
|
|
|
|
|
|
|
|||||||
ц |
2 |
2ц∙2 |
|
|
|
|
|
|
|
||||||||
|
2 S 2 |
|
S |
2 |
|
2 |
|
|
|
|
|
|
|
|
|||
Або |
|
ц |
1 |
2 |
2 |
|
. |
|
= |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Для S = |
= |
|
|
|
|
|
206265 |
×1000000 |
|
= 4,6 |
|
||||||
|
|
|
∙ |
|
|
|
|||||||||||
Звідси |
|
|
2∙2 2∙2 |
|
2.72×2×5000002×5000002 |
|
мм. |
||||||||||
|
|
|
|
|
|
|
2 |
|
|
2 |
|
2 |
|
2 |
|
|
|
|
|
|
500м β = 150°. |
с = SА+ SВ = 500 м. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Для S = 250 м: |
|
|
|
|
|
|
l = 2,3 мм. |
|
|
|
|||||||
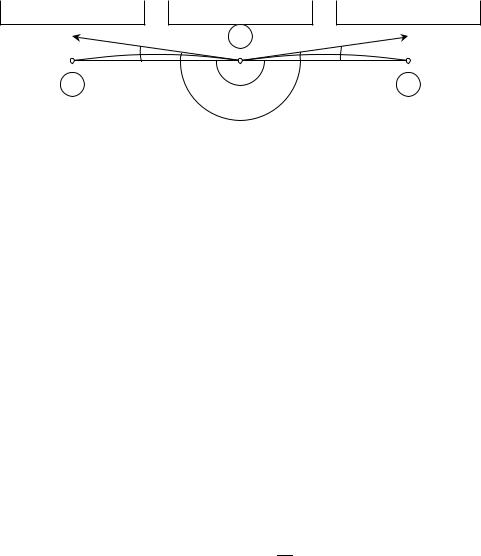
2.10. Похибка у вимірюванні кута через природне довкілля
Погана прозорість атмосфери та дрижання зображень візирних цілей викликають випадкові похибки вимірювання кутів. Дрижання зображень візирної цілі в горизонтальній площиніє короткотривалим явищем боковоїрефракції – викривленням світлового променю в горизонтальній площині. Дрижання, викликанімиттєвими змінами горизонтальних ґрадієнтів температури на всьому шляху променю від візирної цілі до теодоліта. Ці впливи не є загрозливими і не перевищують допуску на одне джерело кутових похибок – 2,7". Однак в атмосфері часто існують довготривалі, спрямовані середні горизонтальні ґрадієнти температури, які не змінюють знаку: зменшення чи зростання температури спрямоване в одному напрямі протягом годин. Так, наприклад, якщо на вулиці, стіни будинку нагріті сонцем, тодівід стін нагріваються близькі до стін прошарки повітря. У результаті, якщо на
12
віддалі 10 см від стіни середня температура, наприклад, 25°С, тоді в напрямі до середини вулиці, на такій же висоті, на віддалі110 см від стіни, температура нижча іможе бути 24,5°С. Тобто, горизонтальний ґрадієнт температури dT / dx = 0,5 град/м. Горизонтальні ґрадієнти температури можуть сягати 1°С. З віддаленням від стін горизонтальні ґрадієнти температури зменшуються. Біля стін густина повітря буде менша, ніж далі від стін. Світловий промінь, що йде від візирної цілі до теодоліта викривиться (за законом Ферма) опуклістю в сторону
S
будинку. Промінь розповсюджується оптично найкоротшим шляхом: ∑ni∆Si = мінімум; ni
i
– показник заломлення повітря на відрізку ∆Si . У результаті матимемо картину показану на рис. 2.10.
5КЖ |
3КЖ |
|
7КЖ |
rГ′′ |
2 |
|
rГ′′ |
1 |
|
β β1 |
3 |
Рис.2.10. Вплив бокової рефракції на вимірювання горизонтальних кутів.
Допустимо, в точці 2 потрібно виміряти горизонтальний кут β . Візирні марки
розташованів точках 1 та 3. Променісвітла, від точок 1 та 3 до точки 2 розповсюджуються криволінійно, до того ж цікриві обернуті опуклістю до стіни. Спрямовуючи трубу на точку 1, або на точку3, спостерігачубуде здаватися, що трубаспрямована на точку1 або 3, удійсності труба буде спрямована по дотичній до світлових кривих в точці 2,оскільки в цій точці крива
збігається з дотичною.Таким чином, вимірюватимемо не кут β , а кут β1 . Малігоризонтальні кути rГ між хордами, показані на рисунку пунктирами, та дотичними, називають кутами
бокової рефракції.
Цікути можна обчислити за формулою
rГ′′ = 8,13 |
P |
|
dT |
S . |
(2.10) |
|
T 2 |
dx |
|||||
|
|
|
|
де: P – тиск атмосфери в мб (гекто Паскалях); Т – абсолютна температура: Т = 273° + t°С; dT / dx – горизонтальний ґрадієнт температури у ґрадус/м, S – довжина лініїу метрах. Для Т = 298°, P =980мб, S = 500 м, dT / dx = 0,5 ґрад/м, rГ′′ = 22,4". Навіть, для ґрадієнта dT / dx =
0,025 ґрадус/м, rГ = 1,12", 2rГ′′ = 2,24".
Якщо тиск виміряно умм рт. ст, то |
. |
|
Г″ = 10,84 2 |
(2.11) |
Отже, вимірювання кутів вздовж стін будинківможна виконуватиколигоризонтальні ґрадієнти температури незначні. Значною бокова рефракція може бути тоді, коли поліґонометричний хід прокладають вздовж рік, озер, шосейних доріг та залізниць, вздовж межповерхоньзрізним альбедо(наприклад, луки-рілля),вздовжкрутихсхилів.Зрозуміло,що
втаких умовах слід виконувати вимірювання кутів в такі періоди доби, коли горизонтальні ґрадієнти температури незначні.
Видимимкритеріємнезначнихґрадієнтівєвідсутністьколиваньзображеньвізирноїцілі
вгоризонтальній та вертикальній площинах, та наявності хоча б незначного вітру – 0,5 м/сек.
Це, так звані періоди спокійних зображень, які також називають періодами геодезичної
13
видності. Вонинастають вранці, приблизнопівторигодини післясходутазагодинудо заходу сонця. Нажаль, під час ясної, антициклонної погоди ці періоди продовжуються 20-30 хвилин зранку та ввечері.
У похмуру погоду вони значно довші. Можна вилучати бокову рефракцію введенням поправок, але це вимагає вимірювання додаткових параметрів.
2.11. Похибка у вимірюванні кута через похибки вихідних даних
Як координати, так і (обчислені за ними) дирекційні кути вихідних пунктів містять певні похибки. Зрозуміло, що ці додаткові похибки не пов’язані з виконуваними вимірюваннями, а з вимірюваннями, які виконували створюючи геодезичну мережу вищого класу.Це викликає додаткові величини нев’язок в кутомірних ходах, що прокладеніміж цими відомими дирекційними кутами. І хоча кути можуть бути виміряні у межах допуску, нев’язка може бути більшою від допустимої .Виникнення цих додаткових нев’язок слід передбачати і вимірювати кути з деяким запасом точності.
β’
β t |
u |
X |
|
||
|
|
= 5"√5 = 11,2" |
|
розряду |
Полігонометрія4-го класу |
|
Для полігонометрії 1-го |
|
|
= 10"√5 = 22,4" |
|
|
|
|
|
|
= 1′√4 = 120" |
|
Для полігонометрії 2-го |
|
|
||
|
|
||
|
|
||
|
|
= 20"√5 = 44,7" |
|
|
Теодолітний хід |
|
розряду |
|
|
|
Теодолітний хід
= 20"√4 = 40"
прокладений електронним тахеометром
Рис. 2.11. Пояснення щодо похибки вихідних даних.
Як бачимо, теодолітні ходи прокладені електронним тахеометромкатегорично не можна не можна прив’язувати до ходів полігонометрії 2-го розряду, а до ходів 1-го розряду – небажано.
14

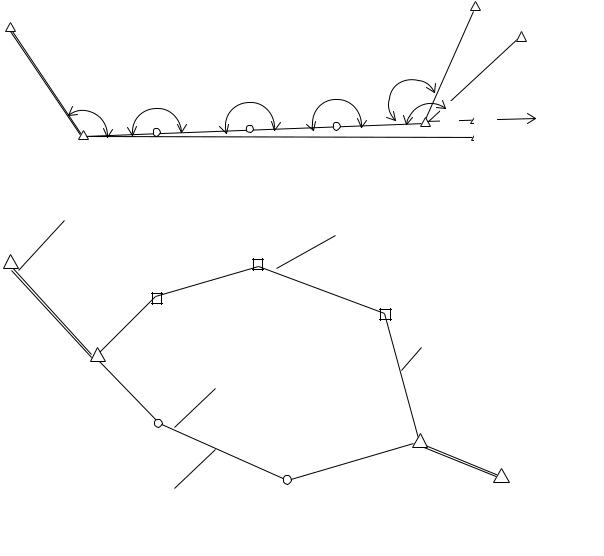
2.13. Похибка у вимірюванні кута через особові похибки
Як ми вже знаємо, до цих похибок відносяться похибки наведення труби на візирну ціль та похибки відліків лімба (горизонтального кута). Розглянемо окремо, як впливають ці похибки на вимірювання кутів методом кругових прийомів та методом повторень, якщо кут виміряний одним повним прийомом, або одним повторенням, а також, якщо кут виміряний n
прийомами або P повтореннями.
Спосіб кругових прийомів.
Нехай вимірюють кут β , створенийдвоманапрямками (див. рис.27). Як відомо, під час
вимірювання, після наведення труби на ціль беруть два відліки і з них виводять середнє значення.
a |
mв |
;mv |
0° |
2 |
|
|
|
β
T
 b m2в ;mн
b m2в ;mн
Рис. 27. До розрахунку похибок вимірювання горизонтального кута методом кругових прийомів.
Нехай труба наведена на ліву ціль та взято відлік a . Похибка відліку mв , похибка середнього відліку, якщо діють тільки випадкові похибки, буде m2в ; випадкову похибку наведення труби позначимо mн . Аналогічно, під час наведення труби на праву ціль, взято
відлік в; найімовірніші похибки також |
mв |
|
та mн . Оскільки поділки на лімбі зростають за |
|||
|
|
|
||||
2 |
||||||
|
|
|
|
|||
ходом годинниковоїстрілки, тодікут β знайдемо з виразу: |
|
|||||
|
|
|
|
β = в−а. |
(1) |
|
З виразу (1), що є різницею двох змінних величин, можемо (на основі теорії похибок вимірювань) записати для півприйому(КЛ або КП) квадрат середньої квадратичної похибки:
mβ2 п/ |
п = mв2 |
+ mв2 |
+ mн2 |
+ mн2 , |
|||||
або: |
|
2 |
|
2 |
|
|
|
||
mβ2 п/ п = mв2 +2mн2 . |
|||||||||
|
|||||||||
Квадрат похибки одного прийомубуде: |
|
|
|
m2 |
|
|
|
||
|
|
|
|
|
|
|
|
||
|
mβ2 |
п = |
β п/ п |
, |
|
||||
або: |
2 |
|
|||||||
|
|
|
|
|
|
||||
|
|
|
|
m2 |
|
|
|
||
|
mβ2 п = |
+mн2 . |
|||||||
|
в |
||||||||
|
|
|
|
|
2 |
|
|
|
|
Квадрат похибки кута, виміряного n прийомами буде: |
|||||||||
|
m2 |
= |
1 |
|
|
m2 |
|
||
|
|
m2 |
+ |
в |
. |
||||
|
β |
|
n |
|
н |
2 |
|
||
|
|
|
|
|
|
||||
Таким чином:
15
(2)
(3)
(4)
(5)
(6)
m |
|
= |
1 |
|
|
+ |
m2 |
|
|
(7) |
β |
|
m2 |
в |
. |
||||||
|
|
|
|
н |
|
2 |
|
|
||
|
|
|
n |
|
|
|
|
|||
Спосіб повторень.
Як і раніше, нехай кут β виміряний методом повторень. Спрямовуємо трубу на ліву
цільідва рази відлічуємо круг. Будемо мати похибки середнього відліку |
mв |
|
та наведення mн |
||||
|
|
|
|||||
2 |
|||||||
|
|
|
|
|
|||
. Спрямовуємотрубуна правуціль. Круг не |
відлічуємо, тому матимемо |
тільки |
|||||
похибкуспрямування mн . Потім виконуємо |
тільки наведення труби |
p |
|
разів, на лів у і |
|||
правуціль. Остаточноспрямовуємо трубу на праву ціль і відлічуємо круг. Похибка середнього
із першого і другого відліків |
mв |
|
. Квадрат похибки P кратного кута β , виміряного з одним |
|||||||||||||
|
|
|
||||||||||||||
2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
розташуванням вертикального круга, буде: |
m2 |
|
m2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
m′β2 |
= |
+ |
+ Р mн2 + Р mн2 |
, |
(8) |
|||||||
|
|
|
|
в |
в |
|||||||||||
або: |
|
|
|
Ркр |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
m′β2Р |
|
= mв2 + 2Р mн2 . |
|
|
||||||||
|
|
|
|
|
|
|
(9) |
|||||||||
|
|
|
|
|
|
кр |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
P разів |
|
||
|
|
|
|
|
|
|
л |
|
m 0 |
|
; m н ; m н ; m н |
; m н |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
0° |
|
|
|
|
|
|
2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
T |
β |
P разів |
 п mн;mн;mн;mн; m20
п mн;mн;mн;mн; m20
Рис. 28. До розрахунку похибок вимірювання горизонтального кута способом повторень.
Квадрат похибки P -разового кута, виміряного з двомарозташуваннями вертикального круга, буде:
mβ2 |
= |
m2 |
+ Р mн2 . |
в |
|||
Ркр |
|
2 |
|
Допустимо,одноразовий кут β , а P -разовий кут – A . Тоді:
β = Р1 А.
Це найпростіша функція добуткупостійної величини 1 P на змінну A . Тому:
P на змінну A . Тому:
|
|
|
|
mβ2 = |
1 |
|
mA2 . |
|
|||
Оскільки mA2 = mβ2 |
|
|
|
P2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
Р |
, тоді: |
|
|
|
|
|
|
|
|
|
|
|
|
кр |
|
|
|
|
|
|
|
|
|
|
|
m2 |
|
1 |
m2 |
+ Р m2 |
|
||||
|
|
= |
|
|
|
|
в |
. |
|||
|
|
|
|
2 |
|||||||
|
|
β |
|
|
P |
|
2 |
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
||
Вираз (13) можна ще записати так:
16
(10)
(11)
(12)
(13)