

1.2.Структура и кинематика плоских механизмов
При кинематическом анализе и синтезе механизмов всегда необходима его кинематическая модель, такой моделью является кинематическая (структурная) схема механизма. Зная условные обозначения звеньев и кинематических пар, можно составить кинематическую (структурную) схему любого механизма. Сделаем это на примере модели двигателя. Составим кинематическую схему (Рис. 1.9). Это кинематическая схема плоского механизма.
Схема механизма должна выполняться в масштабе. Величина масштаба e размерная м/мм.
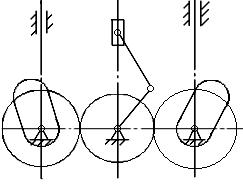
Рис. 1.9
2.Структурное исследование механизмов
2.1.Степень подвижности механизма
Если на звено не наложено никаких условий связи, то оно в пространстве имеет шесть степеней свободы. N звеньев, не соединенных кинематическими парами, имеет 6N степеней свободы или 6n независимых движении.
Соединим N звеньев парами I, II, III, IV, V классов.
Пусть количество пар:
I класса = Р1
II класса = Р2
III класса = Р3
IV класса = Р4
V класса = Р5
Известно, что в зависимости от класса кинематической пары, на относительное движение звеньев налагается определенное число условия связи, т.е. ограничений движения, тогда общее число условий связи, налагаемое всеми парами будет:
5P5 + 4Р4 + 3Р3 + 2P2 +P1
Число же степеней свободы кинематической цепи будет Н=6N-(5P5 + 4Р4 + 3Р3 + 2P2 +P1). Одно звено этой цепи обратим в стойку, тогда число степеней свободы всей цепи уменьшится на шесть, т.е. Н-6=W – число степеней свободы кинематической цепи относительно стойки.
W = 6n – 6 – (5P5 + 4Р4 + 3Р3 + 2P2 +P1);
W = 6(n – 1) – (5P5 + 4Р4 + 3Р3 + 2P2 +P1);
W = 6n – (5P5 + 4Р4 + 3Р3 + 2P2 +P1)
– число степеней свободы кинематической цепи относительно стойки. n – число подвижных звеньев. Это выражение было дано в 1897 году Сомовым и несколько изменено Малышевым в 1923 году, получило название формула Сомова-Малышева для пространственной цепи.
Механизм представляет собой кинематическую цепь, звенья которой совершают вполне определенные движения. Как же связана определенность движения звеньев механизма со степенью свободы?
Степень свободы W=1 означает, что одному звену механизма можно предписать определенный закон движения, т.е. задать одну обобщенную координату, все остальные звенья будут совершать определенные движения.
Обобщенные координаты механизма – это независимые между собой координаты, определяющие положение всех звеньев механизма относительно стойки.
Звено, которому предписан определенный закон движения (задана обобщенная координата) называется ведущим или начальным звеном. Часто ведущее звено является входным. Число степеней свободы определяет количество ведущих звеньев или обобщенных координат. Ведущим звеном может быть одно и более (промышленные роботы имеют 6–8 степеней свободы).
Для пространственного механизма степени свободы возможно определить по формуле Сомова-Малышева. Если же на движение звеньев механизма, наложены общие условия связи, т.е. дополнительные требования, то это сказывается на характере движения звеньев и, следовательно, изменится структурная формула подвижности механизма.
Рассмотрим механизм пространственного четырехзвенника (Рис. 2.1).
Задана одна обобщенная координата, имеем одно начальное или ведущее звено. Теперь поставим дополнительные требования – оси всех вращательных пар должны быть параллельны оси X (Рис. 2.2). Это приведет к тому, что механизм обратится в плоский. Здесь невозможны три движения – вращение вокруг осей Y и Z и перемещение по X. Возможно вращение вокруг X и перемещение по Z и Y. Это обстоятельство влечет за собой изменение и структурной формулы:
W=(6–3)n–(5–3)P5 + (4–3)Р4 = 3n–2P5 + Р4
n=3; P5=2; P4=1; P3=1; W=6n – 5P5 + 4Р4 + 3Р3 + 2P2 +P1 W=63–52–41–31=1
Рис. 2.10
Рис. 2.11
Это выражение, определяющее степень свободы плоского механизма, выведено Чебышевым в 1869 году.
Применим его к рассматриваемому механизму:
n=3, P5= 4, Р4=0
W=33–24=1,
т.е. необходимо также одно начальное звено. Выберем в качестве него звено АВ.
В соответствии с формулой Чебышева можем сказать, что плоские механизмы могут содержать только пары V и IV класса.
Основное, что определяет движение механизма – это число степеней у свободы и число условий связи. Но существуют степени свободы и условия связи, которые не влияют на характер движения звеньев. Такие степени свободы являются лишними, а условия связи – избыточными.
Рассмотрим механизм (Рис. 2.3).
Звено BE создает избыточные связи, ставится оно в механизме, исходя из конструктивных соображений; если же его удалить характер движения остальных звеньев не изменится.
Пассивные связи и лишние степени свободы могут быть выявлены при изучении кинематики механизмов. Так, если определение перемещений и скоростей можно произвести без участия отдельных звеньев, значит они вносят либо избыточные связи, либо лишние степени свободы.

n=4; P5=6; W=3*4-2*6=0
Рис. 2.12