

6.2.1.Силовой расчет начального звена (Рис. 6.4)
Рис. 6.45
Расчет
начального звена ведем в следующем
порядке; освобождаясь от связей, заменяем
их действие силами реакций
связи. В точке А прикладываем реакцию
![]() найденную ранее при силовом расчете
группы. В точке 0 прикладываем искомую
реакцию
найденную ранее при силовом расчете
группы. В точке 0 прикладываем искомую
реакцию
![]() .
В точке S1
прикладываем силы
.
В точке S1
прикладываем силы
![]() и
и
![]() .
.
![]()
Рис. 6.46
В
точке А прикладываем силу
![]() ,
направление которой известно. Сила
–
это сила, передающаяся на начальное
звено со стороны отброшенной части
механизма, а также это сила, представляющая
действие на начальное звено со стороны
двигателя и отброшенных вместе с ним
звеньев. Это сила называется уравновешивающей
и определяется, исходя из заданного
закона движения начального звена.
,
направление которой известно. Сила
–
это сила, передающаяся на начальное
звено со стороны отброшенной части
механизма, а также это сила, представляющая
действие на начальное звено со стороны
двигателя и отброшенных вместе с ним
звеньев. Это сила называется уравновешивающей
и определяется, исходя из заданного
закона движения начального звена.
Если =const, то M0=0=Py-R21h+G1а
Если же звено вращается с угловым ускорением , то M0=J0
После
определения PY
строится план сил, из которого определяется
реакция
![]() Конструкция привода может быть такой,
что на начальное звено внешний силовой
фактор передается не в виде силы, а в
виде момента сил.
Конструкция привода может быть такой,
что на начальное звено внешний силовой
фактор передается не в виде силы, а в
виде момента сил.
Расположение линии действия желательно выбирать так, чтобы реакция была бы по возможности наименьшей.
Рассмотрим порядок расчета еще одной группы (Рис. 6.6).
Группа с одной внутренней вращательной парой. Здесь все известные силы, действующие на звенья 2 и 3 представлены в виде эквивалентных систем сил (в виде главных векторов сил и главных моментов). Будем считать, что силы и моменты сил инерции так же включены в число известных сил. Составляя уравнение равновесия для группы, будем иметь:
![]()
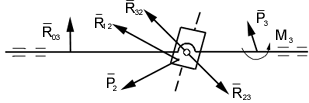
Рис. 6.47
Отсюда
видим, что на известной стороне
треугольника надо построить две другие
стороны, направления которых известны.
Такой треугольник строится и поэтому
решение задачи следует начать с построения
плана сил для группы в целом, а затем,
записав уравнение равновесия для
какого-либо звена найти внутреннюю
реакцию
![]() или
или
![]() ,
затем найти точки приложения реакций
,
затем найти точки приложения реакций
![]() и
из уравнений моментов относительно
точки D.
и
из уравнений моментов относительно
точки D.
Таким образом, составляя уравнение равновесия для группы в целом и анализируя его, можно найти кратчайший путь решения задачи не только для групп 2 класса, но и для групп 3 класса.
Вот пример (Рис. 6.7), когда решение задачи следует начать с построения плана сил для звена 3.

Рис. 6.48
Вот
другой пример (Рис. 6.8), когда решение
следует начать с определения
![]() затем построить план сил для звена
3
затем построить план сил для звена
3
Если силовой расчет механизма необходимо провести с учетом трения в кинематических парах, тогда расчет без учета трения является только первым приближением, по результатам которого определяются нормальные давления в парах, а затем – приближенные значения сил трения на основании известных законов трения.
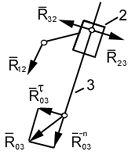
Рис. 6.49
7.Динамика машинного агрегата
Совокупность машины-двигателя, служащей для преобразования энергии, передаточного механизма и рабочей машины, производящей работу, составляет машинный агрегат. Закон движения определяется взаимодействием этих трех частей. В первой из них создаются движущие силы, во второй происходит преобразование формы движения и в третьей – механическая энергия расходуется на выполнение полезной работы.
Движущей силой называется сила, направление которой в точке ее приложения образует острый угол с направлением скорости этой точки, т.е. сила, совершающая положительную работу. Если же сила совершает отрицательную работу, то это сила сопротивления. Силы сопротивления различаются на силы полезных сопротивлений, связанных с выполнением той механической работы, для совершения которой построена машина, и силы вредных сопротивлений.