

6.1.3. Силы инерции звена, совершающего вращательное движение вокруг неподвижной оси (Рис. 6.2)
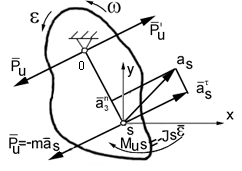
Рис. 6.43
Применяя теорему об изменении количества движения и считая, что звено совершает поступательное движение вместе с системой координат начало которой находится в центре тяжести звена, получим:
![]() ,
,
где
![]() модуль aS
найдем по теореме Пифагора.
модуль aS
найдем по теореме Пифагора.
![]()
тогда модуль силы инерции
![]() .
.
Главный момент сил инерции относительно центра тяжести найдем по теореме об изменении кинетического момента инерции той же точки
![]()
Таким образом, во вращательном движения система сил инерции, при выборе центра приведения в центре тяжести, приводится к главному вектору и главному моменту сил инерции. Систему сил инерции можно представить и другой эквивалентной системой сил, выбирая за центр приведения, например, ось вращения звена и перенося в него главный вектор сил инерции, будем иметь главный вектор, геометрически равный его прежнему значению, а складывая моменты (прежний момент и момент, получающийся в результате переноса силы из точки S в точку 0), получим главный момент сил инерции относительно нового центра приведения 0:
![]()
Можно найти и такой центр приведения, для которого Mи=0 т.е. такую точку, в которой приложена равнодействующая сил инерции. Такой точкой будет центр качения звена.
6.1.4.Снлы инерции звена, совершающего плоско-параллельное движение (Рис. 6.3)
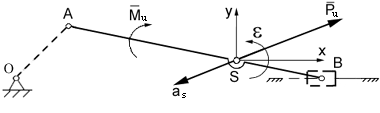
Рис. 6.44
Здесь так же можно найти такой x центр приведения, для которого Mu=0, т.е. система сил инерции может быть сведена к равнодействующей. Как видим, только, в случае поступательного движения линия действия равнодействующей сил инерции проходит через центр тяжести звена.
6.2.Определение реакций в кинематических парах групп Ассура
С целью проведения силового расчета механизм расчленяется на группы Ассура. Расчет начинается с той группы, в состав которой входит выходное звено. Затем последовательно рассчитываются все группы и заканчивается силовой анализ расчетом входного звена механизма. Методика расчета всех групп II класса едина.
Определение реакции в кинематических парах групп с помощью метода кинетостатики рекомендуется проводить в следующем порядке:
1. Изобразить группу Ассура в заданном положении, вычертив ее в соответствующем масштабе
2. Приложить к звеньям группы все заданные силы и неизвестные реакции в кинематических парах.
3. Приложить к звеньям группы силы инерции и моменты сил инерции.
4. Согласно принципу отвердевания и принципу Даламбера составить уравнение равновесия для группы в целом, как для твердого тела. Записывая уравнение равновесия для группы, следует придерживаться определенного порядка: вначале записать все силы, действующие на одно звено, затем записать все силы, действующие на другое звено. Запись уравнения следует начинать и заканчивать неизвестными реакциями. Для большей ясности в уравнение следует включать и внутренние реакции (Рис. 6.4, б). Сложение векторов сил проводится в той же последовательности, в которой велась запись уравнения.
Проследим этот порядок на примере группы с тремя вращательными парами, входящей в состав шарнирного четырехзвенника. Составим уравнение равновесия группы:
![]()
![]()
По
этому уравнений построить план сил не
удастся, т.к. если построение плана
свести к построению треугольника,
представив все известные силы как одну
сторону треугольника, то увидим, что
две другие стороны, включают силы
величины и направления которых не
известны. Такой треугольник не возможно
построить. В этом случае надо использовать
уравнение равновесия моментов сил,
разложив одну из реакции на два
направления, пустив одну из составляющих
реакции через ту точку, относительно
которой будет составляться уравнение
моментов. Составим уравнение моментов
относительно точки
B
для звена
2. Выбирая
точку В
в качестве центра мы исключаем тем самым
из уравнения моментов нормальную
составляющую
![]() реакций
реакций
![]() в
шарнире А
и реакцию R32
в шарнире В.
Итак
в
шарнире А
и реакцию R32
в шарнире В.
Итак
![]()
Разрешая
это уравнение относительно
![]() ,
получим ее величину. Направление реакции
определяется ее знаком. После определения
этой составляющей видим, что план сил
и в этом случае построить не удается.
Тогда таким же образом поступаем с
реакцией R03,
раскладывая ее на две составляющие и
составляя уравнение моментов относительно
точки В для звена 3 находим
,
получим ее величину. Направление реакции
определяется ее знаком. После определения
этой составляющей видим, что план сил
и в этом случае построить не удается.
Тогда таким же образом поступаем с
реакцией R03,
раскладывая ее на две составляющие и
составляя уравнение моментов относительно
точки В для звена 3 находим![]() .
.
Рассматривая
уравнение равновесия, после того, как
силы
![]() отправлены в категорию известных сил,
видим, что треугольник, у которого одна
сторона известна по величине и направлению,
а две другие (
отправлены в категорию известных сил,
видим, что треугольник, у которого одна
сторона известна по величине и направлению,
а две другие (![]() и
и
![]() )
известны по направлению построить
можно. Поэтому приступаем к построению
плана сил (Рис. 6.5). Далее определяем
реакции во внутренней паре. Для этого
составляем уравнение равновесия для
какого-либо одного звена, (составление
уравнения заключается в простом
переписывании части уже составленного
уравнения для группы). Напишем уравнение
для звена 2, освобождая
его от связей в точке В:
)
известны по направлению построить
можно. Поэтому приступаем к построению
плана сил (Рис. 6.5). Далее определяем
реакции во внутренней паре. Для этого
составляем уравнение равновесия для
какого-либо одного звена, (составление
уравнения заключается в простом
переписывании части уже составленного
уравнения для группы). Напишем уравнение
для звена 2, освобождая
его от связей в точке В:
![]()
Для определения R32 используем уже построенный для группы план сил.
![]()