

Моделирование нелинейных систем автоматического управления
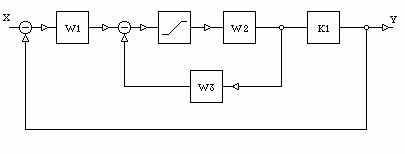
Исследуйте влияние величины входного сигнала Х на колебания нелинейной системы. Выберите соответствующие решатели для моделирования.

Вариант 1
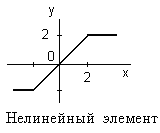
![]() ;
T1 = 2 c;
T2 = 1 c;
;
T1 = 2 c;
T2 = 1 c;
![]() ; k2
= 10; T3 = 0.5 c;
T4 = 0.1 c.
; k2
= 10; T3 = 0.5 c;
T4 = 0.1 c.
____________________________________________________________________________

В ариант
2
ариант
2
K = 2.3
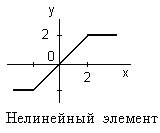
![]() ;
k = 600; T1
= 2.88 c;
;
k = 600; T1
= 2.88 c;
 ;
T2 = 0.4 c;
T3 = 25 мc.
;
T2 = 0.4 c;
T3 = 25 мc.
____________________________________________________________________________
Вариант 3
K1 = 0.005;
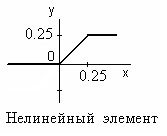
![]() ; k1
= 30; T1 =0.005 c;
; k1
= 30; T1 =0.005 c;
![]() ; k2
=140; T2 =0.4 c;
; k2
=140; T2 =0.4 c;
![]() ; k3
= 0.5.
; k3
= 0.5.
_ ___________________________________________________________________________
___________________________________________________________________________
В ариант 4
K1 = 0.01;
![]() ; k1
= 10; T1 =3.4 c;
; k1
= 10; T1 =3.4 c;
![]() ; T2
=1.4; T3 =0.4 c;
; T2
=1.4; T3 =0.4 c;
; k3 = 1.5.
_ ___________________________________________________________________________
___________________________________________________________________________
Вариант 5
![]() ; k
= 25; T = 0.88 c;
= 0.3;
; k
= 25; T = 0.88 c;
= 0.3;
; T2 = 0.4 c; T3 = 0.025 c.
____________________________________________________________________________

Вариант 6
![]()
 ; T1
= 0.1 c; K1
= 40
; T1
= 0.1 c; K1
= 40
![]() ; T2
= 0.25 c; T3
= 0.05 c.
; T2
= 0.25 c; T3
= 0.05 c.
____________________________________________________________________________
В
 ариант
7
ариант
7
![]() ; T1
= 0.1 c; T2
= 0.05 c; K1
= 1.5
; T1
= 0.1 c; T2
= 0.05 c; K1
= 1.5
![]() ; T3
= 0.1 c; T4
= 0.01 c; K = 10
; T3
= 0.1 c; T4
= 0.01 c; K = 10
ДОПОЛНЕНИЕ
Моделирование систем управления. Control System Toolbox
![]() Input
Point
– точка входа. Позволяет обозначить
точку входа сигнала в любое место
блок-схемы. Ввод этот носит условный
характер, т.к. предназначен для построения
частотных характеристик моделируемой
системы. Для установки Input
Point в моделируемую
блок-схему достаточно щелкнуть правой
кнопкой мыши на линии соединения блоков,
в появившемся окошке выбрать Linear
Analysis
Points,
а затем точку входа Input
Point
или выхода Output
Point
или др.
Input
Point
– точка входа. Позволяет обозначить
точку входа сигнала в любое место
блок-схемы. Ввод этот носит условный
характер, т.к. предназначен для построения
частотных характеристик моделируемой
системы. Для установки Input
Point в моделируемую
блок-схему достаточно щелкнуть правой
кнопкой мыши на линии соединения блоков,
в появившемся окошке выбрать Linear
Analysis
Points,
а затем точку входа Input
Point
или выхода Output
Point
или др.
Для построения частотных характеристик обращаемся в основном меню к пункту Analysis, затем Control Design и Linear Analysis.

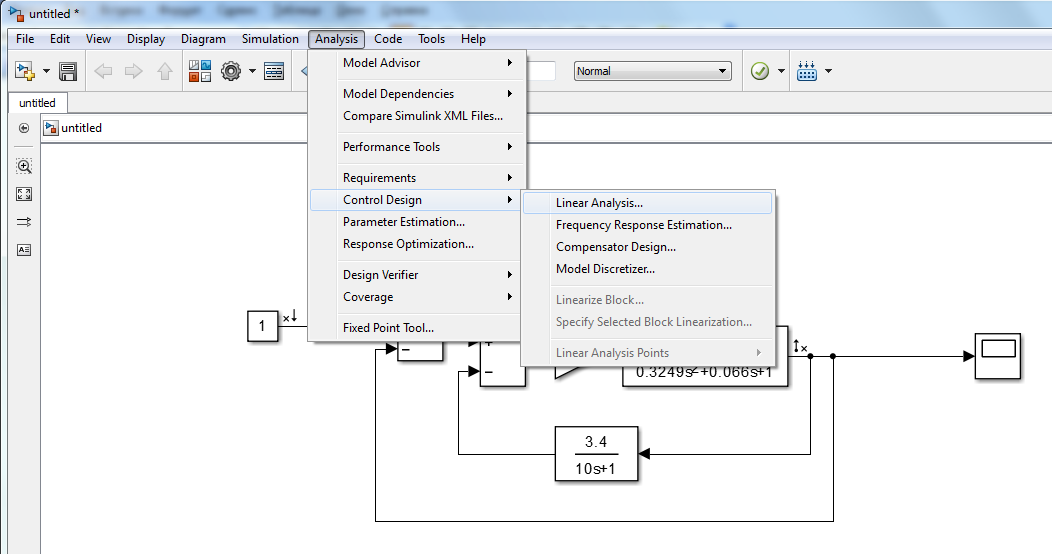
Загружается Linear Analysis Tool. Это приложение позволяет производить не только построение частотных характеристик, как представлено на рисунке, но и, например, оптимизацию.
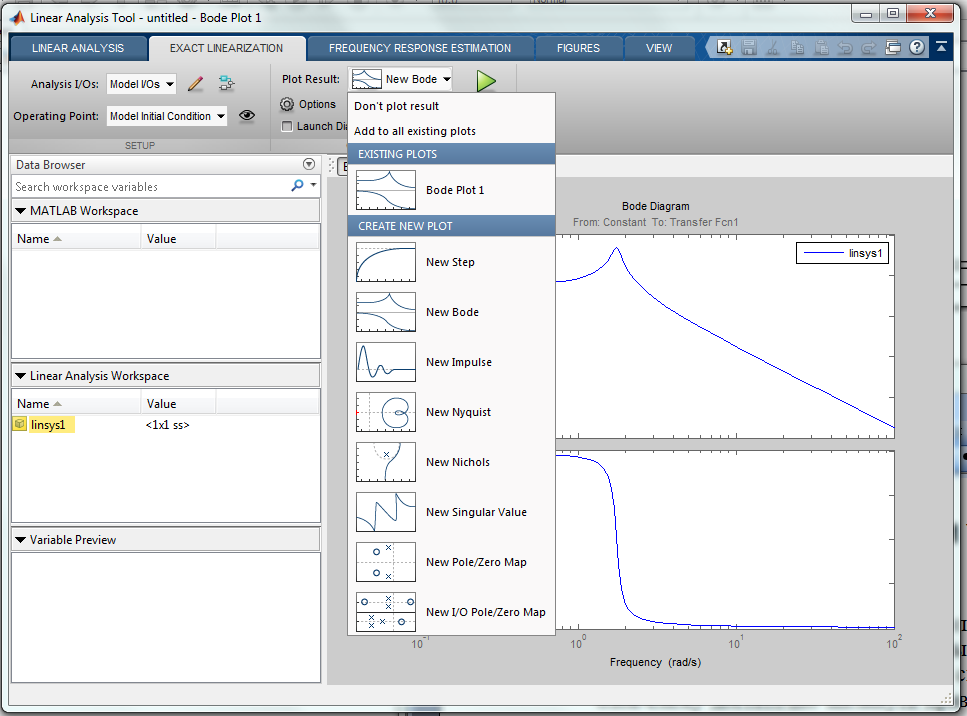
В появившемся окне Linear Analysis Tool щелкаем в строке Plot Result. В появившемся спускаемом меню выбираем требуемую характеристику, например, Bode, а для ее построения щелкаем кнопку кнопку Linearize. После вычислений появится окно Bode Plot 1. Правой кнопкой мыши щелкаем на экране. В появившемся меню выбираем Grid для построения сетки.
Control System Toolbox позволяет рассчитывать следующие характеристики:
 Step
-
реакция на скачок; вычисляет переходный
процесс в линейной системе при воздействии
на вход единичного сигнала. Начальное
состояние - нулевое (в пространстве
состояний). Модель может быть непрерывной
или дискретной.
Step
-
реакция на скачок; вычисляет переходный
процесс в линейной системе при воздействии
на вход единичного сигнала. Начальное
состояние - нулевое (в пространстве
состояний). Модель может быть непрерывной
или дискретной.

Impulse - реакция на импульс; вычисляет импульсную характеристику линейной системы. На вход подается дельта-функция Дирака. Начальное состояние - нулевое (в пространстве состояний). Модель может быть непрерывной или дискретной.

Bode – амплитудно-частотная и фазо-частотная характеристики (график Bode); применяются для анализа устойчивости систем автоматического регулирования, определения запаса по амплитуде и фазе и т.д.
Nyquist – амплитудно-фазовая характеристика (диаграмма Найквиста (Nyquist)); применяются для анализа устойчивости систем автоматического регулирования, определения запаса по амплитуде и фазе и т.д.

Nichols – диаграмма Никольса (Nichols); вычисляет частотную характеристику линейной (линеаризованной) системы в координатах Николса. Диаграммы Nichols используются для построения характеристик замкнутых контуров по разомкнутым, для непрерывных или дискретных систем.

Singular
Value
- график сингулярных
значений линейной системы. Для непрерывных
систем с передаточной функцией H(s)
вычисляются сингулярные значения H(j)
как функции частоты .
Для дискретных систем с передаточной
функцией H(z)
и шагом дискретизации Ts
вычисляет сингулярные значения
![]() для полосы частот между 0 и частотой N
= /Ts.
для полосы частот между 0 и частотой N
= /Ts.
 Pole/Zero
- отображение
нулей и полюсов непрерывной или
дискретный линейной модели. На графике
полюса обозначены “x”,
а нули “o”.
Pole/Zero
- отображение
нулей и полюсов непрерывной или
дискретный линейной модели. На графике
полюса обозначены “x”,
а нули “o”.