

Сопротивление статора Rs (Ом или о.Е.) и индуктивность рассеяния Lls (Гн или о.Е.).
Rotor
Сопротивление ротора Rr ' (Ом или о.е.) и индуктивность рассеяния Llr ' (Гн или о.е.), оба приведены к статору.
Magnetizing inductance
Индуктивность взаимная Lm (Гн или о.е.).
Mechanical
Суммарный момент инерции J (кг м2), суммарный вязкий коэффициент трения F (Н·м·с) и число пар полюсов p.
Initial conditions - начальные условия
Начальное скольжение s, электрический угол θe (град), величины тока статора (A или о.е.) и фазы (град).
[ slip, th, ias, ibs, ics, phaseas, phasebs, phasecs ]
Дополнительные начальные значения для величины тока ротора (A) или (p.u) и фазу (градус):
[ slip, th, ias, ibs, ics, phas, phbs, phcs, iar, ibr, icr, phasear, phasebr, phasecr ]
Начальные условия могут быть полезны при вычислении потокораспределения в блоке Powergui.
Simulate saturation (Моделирование насыщения)
Определяет, моделируется ли магнитное насыщение железа ротора и статора или нет.
Saturation parameters (Параметры режима насыщения)
Определяет параметры кривой насыщения без нагрузки. Режим магнитного насыщения железа статора и ротора (режим насыщения взаимного потока) смоделирован нелинейной функцией (в этом случае полиномиальный) использующие точки кривой насыщения без нагрузки. Вы должны ввести 2 х n матрицу, где n - число точек, взятых на кривой насыщения. Первая строка этой матрицы содержит значения электрических токов статора, в то время как вторая строка содержит значения соответствующих напряжений на клеммах (напряжения статора). Первая точка (в первом столбце матрицы) должна соответствовать, по сути, началу насыщения.
Вы должны выбрать флажок Simulate saturation (Моделирование режима насыщения), чтобы моделировать режим насыщения. Если Simulate saturation не выбран, зависимость между током статора и напряжением статора - линейная.
Входы и выходы
Вход Simulink - механический момент на валу машины. Когда он положителен, асинхронная машина ведет себя как двигатель, когда отрицателен, асинхронная машина ведет себя как генератор.
Выход Simulink - вектор, содержащий 21 переменную. Они (см. предыдущий раздел) все электрические токи текут в машину.
Выход |
Определение |
1 - 3 |
Электрические токи ротора i'ra, i'rb и i'rc |
4 - 9 |
i'qr,
i'dr,
|
10 - 12 |
Электрические токи статора isa, isb и isc |
13 - 18 |
iqs, ids, qs, ds, vqs и vds |
19 - 21 |
|
Для вывода используется блок Machines Measurement Demux в библиотеке Машин.
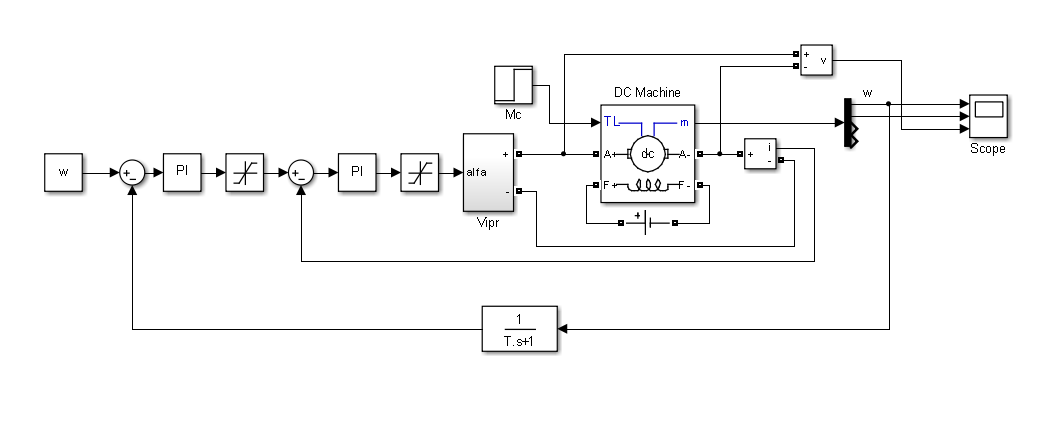
Лабораторная работа № 7 системы подчиненного регулирования: двигатель постоянного тока; синхронная машина с постоянными магнитами
Построить систему подчиненного регулирования двигателем постоянного тока (ДПТ). Параметры двигателей приведены в таблице заданий к работе 4.
Первоначально настройку можно произвести по упрощенной схеме, используя управляемый источник напряжения, а затем заменить управляемый источник напряжения на управляемый трехфазный тиристорный выпрямитель. Настройка ПИ регуляторов традиционными методами на технический оптимум или симметричный оптимум достаточно трудоемкая задача, поэтому воспользуйтесь значениями пропорциональных коэффициентов kp1 и kp2 в интервале 20 – 5000:
пусковой ток в двигателе не должен превышать трехкратного номинального;
желательно, чтобы перерегулирование по скорости не превышало 10%, статическая ошибка 1% при минимальном для данного типа двигателя времени переходного процесса;
каков диапазон регулирования. Во всем ли диапазоне регулирования удовлетворяется качество регулирования?
Построить систему подчиненного регулирования синхронным двигателем с постоянными магнитами (СДПМ). Параметры двигателей приведены в таблице заданий к работе 5.

Замечание. В Simulink есть приложения, которые позволяют достаточно точно настроить и оптимизировать и сами регуляторы и выбрать структуру корректирующего устройства, как линейных SISO Design Tool, так и любых Simulink Design Optimization. Это будет изучаться в курсах Автоматизированного роектирвания.