

Дополнение
Преобразование координат
dq →abc
|
abc → dq
|
Определение
тока статора i1q
![]()
Поток сцепления ротора скольжение
![]()

Лабораторная РАБОТА № 11
Моделирование цифровой системы управления
Параметры электрического двигателя известны.
1. Воспользовшись моделью синхронного двигателя с постоянными магнитами в SimPowerSystem, постройте двухконтурную векторную систему подчиненного регулирования с ПИ регулятором (см. рис.).
2. Воспользовшись блоком MATLAB Function замените часть системы управления на “микропроцессорную”. Обратите внимание, как влияет частота дискретизации на характер переходного процесса и установившееся состояние.
Параметры электрических двигателей:
№ |
Pном, Вт |
n, об/мин |
U, B |
R, Ом |
Ld, мГн |
Lq, Гн |
, Вб |
J, кгм2 |
p |
1 |
250 |
3000 |
310 |
15.6 |
22 |
24 |
0.18 |
25.10-6 |
2 |
2 |
190 |
3800 |
310 |
4.8 |
15 |
15 |
0.185 |
11.10-5 |
2 |
3 |
700 |
4300 |
310 |
2 |
6 |
6 |
0.185 |
19.10-5 |
2 |
4 |
1400 |
4500 |
310 |
0.65 |
2 |
2 |
0.086 |
40.10-5 |
4 |
5 |
1000 |
2000 |
310 |
1 |
5.3 |
5.3 |
0.18 |
60.10-5 |
4 |
6 |
2200 |
5000 |
540 |
0.2 |
1 |
1 |
0.068 |
48.10-5 |
4 |
7 |
4200 |
3000 |
540 |
0.1 |
0.98 |
0.98 |
0.12 |
160.10-5 |
4 |
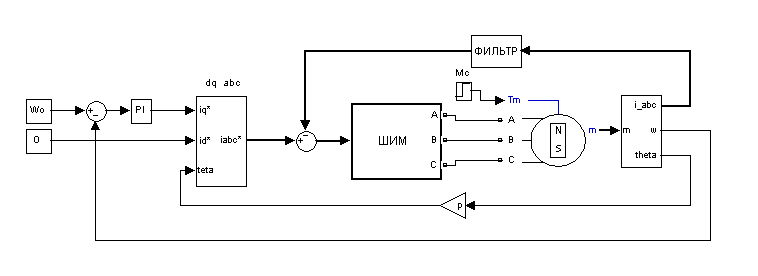
Векторное управление синхронной машины с постоянными магнитами. Схема построена из блоков Simulink и SimPowerSystem.

Возможная схема векторного управления синхронной машины с постоянными магнитами с блоком MATLAB Function имитирующим микропроцессорное управление. Период дискретизации Ts.
ДОПОЛНЕНИЕ
а. Сигнал разности ωо - ω скоростей заданной ωо и скорости двигателя ω, поступает на Pi регулятор. Сигнал на выходе регулятора считается заданным током iq*; ток id* равен нулю. Далее dq токи преобразуются в токи abc. Для этого потребуется электрический угол поворота ротора θе = pθ, где р – число пар полюсов:

б. Пример программы для двухконтурной систему подчиненного регулирования двигателем постоянного тока с ПИ регуляторами:
function z = regul(w,woc,i,Ts) - описание функции
persistent v1 v2 - объявление глобальных переменных
Ki1=78.2847; Ki2=11.8764; - объявление констант
Kp1=61.6200; Kp2=370.5724;
if isempty(v1,v2) - инициализация устойчивых переменных
v1=0; v2=0;
end;
dw=w-woc; - вычисление разности скоростей
x1=v1+dw*Ts; - интегрирование методом Эйлера
v1=x1;
io=Kp1*dw+Ki1*v1; - пи регулятор первый
if io>=40 - ограничение тока
io=40;
end;
if io<=0
io=0;
end;
di=io-i; - вычисление разности токов
x2=v2+di*Ts; - интегирование методом Эйлера
v2=x2;
uo=Kp2*di+Ki2*v2; - пи регулятор второй
if uo<=0 - ограничение напряжения
uo=0;
end;
if uo>=400
uo=400;
end;
z=uo; - значение напряжения
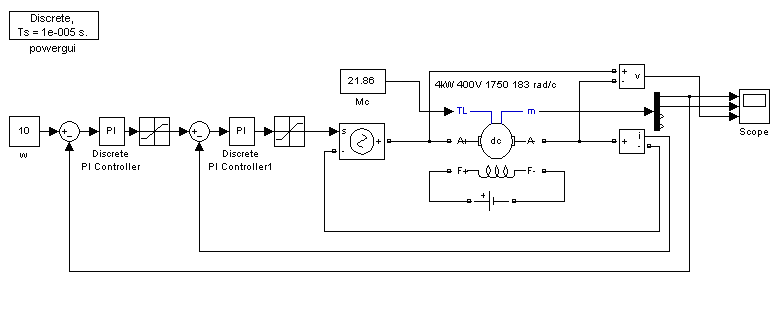
Двухконтурная система подчиненного регулирования двигателем постоянного тока с ПИ регуляторами. Схема построена из блоков Simulink и SimPowerSystem.

Та же схема с блоком MATLAB Function имитирующим микропроцессорное управление. Период дискретизации Ts.