

Лабораторная работа № 9 Моделирование системы векторного управления синхронным двигателем с постоянными магнитами (сдпм)
Построить систему векторного управления синхронным двигателем с постоянными магнитами. Параметры двигателя известны.
№ |
Pном, Вт |
n, об/мин |
U, B |
R, Ом |
Ld, мГн |
Lq, Гн |
, Вб |
J, кгм2 |
p |
1 |
250 |
3000 |
310 |
15.6 |
22 |
24 |
0.18 |
25.10-6 |
2 |
2 |
190 |
3800 |
310 |
4.8 |
15 |
15 |
0.185 |
11.10-5 |
2 |
3 |
700 |
4300 |
310 |
2 |
6 |
6 |
0.185 |
19.10-5 |
2 |
4 |
1400 |
4500 |
310 |
0.65 |
2 |
2 |
0.086 |
40.10-5 |
4 |
5 |
1000 |
2000 |
310 |
1 |
5.3 |
5.3 |
0.18 |
60.10-5 |
4 |
6 |
2200 |
5000 |
540 |
0.2 |
1 |
1 |
0.068 |
48.10-5 |
4 |
7 |
4200 |
3000 |
540 |
0.1 |
0.98 |
0.98 |
0.12 |
160.10-5 |
4 |
В схеме векторного управления СДПМ для создания наибольшего момента используется система координат dq. Ось d направлена по полю постоянного магнита ротора, поэтому ток “катушки d“ устанавливается нулевым, зато ток двигателя должен быть током “катушки q”. Преобразование координат dq →abc создает рабочие токи фаз abc. Обратная связь по току наиболее эффетивна при использовании гистерезисного ШИМ, но можно и обычный PWM генератор.
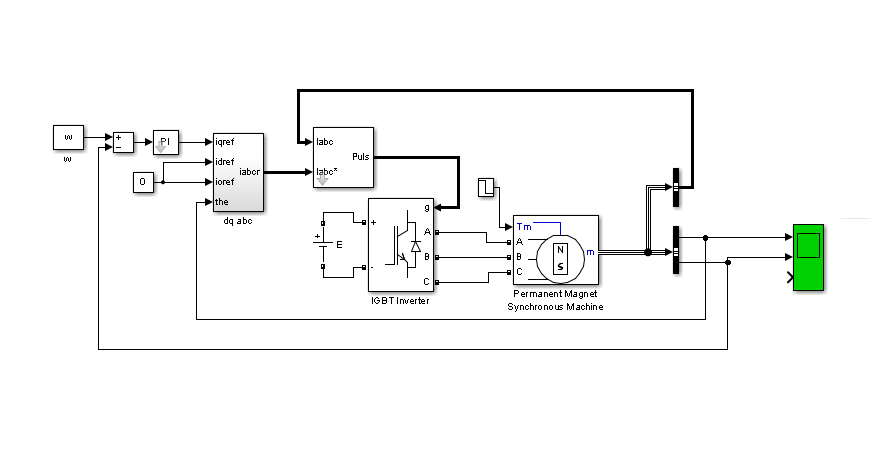
Дополнение
Преобразование координат
dq →abc
Гистерезисный ШИМ
Лабораторная работа № 10 Моделирование системы векторного управления асинхронным двигателем
1) Построить систему векторного управления асинхронным двигателем. Параметры двигателя известны. Четные варианты с разомкнутый ШИМ с вертикальным управлением, нечетные - замкнутый гистерезисный ШИМ.
f = 50 Гц; р = 2
№ |
марка |
P, Вт |
Uф, В |
Iф, А |
R1, Ом |
R’2, Ом |
Lm, Гн |
L1, Гн |
L’2, Гн |
J, кгм2 |
cosφ |
1 |
4А56А4 |
120 |
220 |
0.43 |
97.72 |
72.48 |
1.91 |
2.046 |
2.155 |
2.75.10-4 |
0.693 |
2 |
4А71А4 |
550 |
220 |
1.58 |
16.39 |
15.08 |
0.624 |
0.663 |
0.7015 |
0.0011 |
0.737 |
3 |
4А80А4 |
1100 |
220 |
2.66 |
9.53 |
5.619 |
0.447 |
0.484 |
0.476 |
0.0026 |
0.822 |
4 |
4А112М4 |
5500 |
220 |
11.1 |
1.32 |
0.922 |
0.164 |
0.169 |
0.1715 |
0.0206 |
0.822 |
5 |
4А132М4 |
11000 |
220 |
24.53 |
0.462 |
0.312 |
0.0876 |
0.0903 |
0.0916 |
0.0463 |
0.876 |
6 |
4А180М4 |
30000 |
220 |
54.97 |
0.16 |
0.078 |
0.0489 |
0.05 |
0.051 |
0.2245 |
0.91 |
7 |
4А250М4 |
90000 |
220 |
158.5 |
0.032 |
0.019 |
0.0215 |
0.022 |
0.022 |
1.142 |
0.921 |
2) Проверить как наброс нагрузки влияет на работу двигателя.