

Механическая система (для обеих моделей)
J |
Объединенная инерция ротора и нагрузки |
F |
Объединенное вязкое трение ротора и нагрузки |
Θ |
Угол поворота ротора |
Tм. |
Механический вращающий момент на валу |
где
Диалоговое окно и параметры
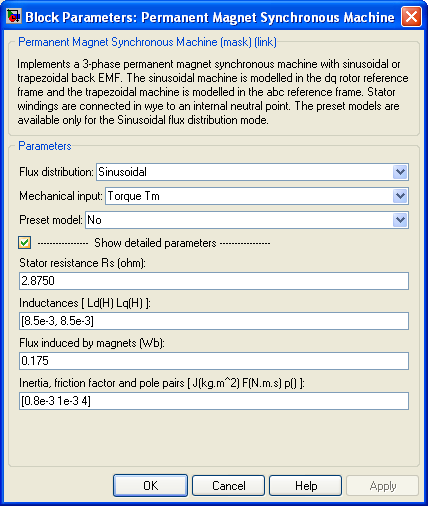
Flux distribution (Распределение потока)
Позволяет выбирать между синусоидальной и трапециевидной электродвижущей силой.
Mechanical input (Механический вход)
Позволяет выбрать или вращающий момент, приложенный к валу, или скорость ротора как сигнал Simulink, приложенный к входу блока.
Выберите Torque Tm, чтобы определить вход вращающего момента, в N.m., изменив вход блока на Tm. Скорость зависит от момента инерции J и разницы между приложенным механическим вращающим моментом Tm и внутренним электромагнитным вращающим моментом Te.
Выберите Speed w, чтобы определить вход скорости, в rad/s, изменив вход блока на w. Если приложена скорость, то игнорируется момент инерции J. Использование скорости позволяет моделировать механическую связь между двумя машинами или связь с SimMechanics и SimDriveline.
Preset Model (Предварительно установленная модель)
Обеспечивает набор электрических и механических параметров различных синхронных моторов с постоянными магнитами; установлены вращающий момент (N.m), постоянное напряжение питания (V), номинальная скорость (оборот в минуту), и момент трогания (N.m).
Выберите Show detailed parameters, чтобы рассмотреть и редактировать детальные параметры, связанные с предварительно установленной моделью.
Show detailed parameters (Показать детально параметры)
Детальные параметры могут измениться независимо ввода, если не выбрано NO.
Stator resistance (Сопротивление статора)
Сопротивление фазы статора Rs (Ом).
Stator inductances (Индуктивности статора)
Синусоидальная модель: d-ось и катушки индуктивности статора q-оси Ld (H) и Lq (H)
Трапециевидная модель: ндуктивность фазы статора Ls (H)
Поток, вызванный магнитами (Flux induced by magnets)
Постоянный поток Ψ (Вб) вызванный в обмотках статора магнитами.
Back EMF flat top area (Противо ЭДС плоской вершины)
Длительность импульса плоской вершины в течение половины периода электродвижущей силы Ф' (градусы) (только для трапециевидной машины).
Inertia, friction factor and pairs of poles (Момент инерции, трение и число пар полюсов)
О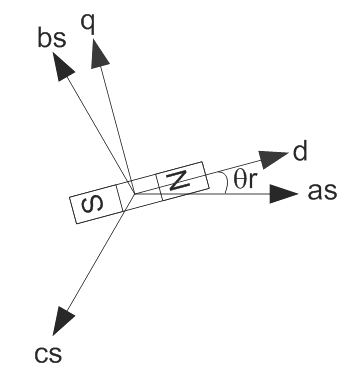 бъединенный
момент инерции нагрузки J
(kg.m2),
объединенный вязкий коэффициент трения
F (N.m.s)
и число пар полюсов p.
бъединенный
момент инерции нагрузки J
(kg.m2),
объединенный вязкий коэффициент трения
F (N.m.s)
и число пар полюсов p.
В блоке установки параметров раздел Advanced есть строка меню
Rotor flux position when theta = 0 (Положение потока ротора, когда ϴ= 0)
Позволяет выбирать заданное положение потока ротора относительно оси фазы А.
 Выберите
Rotor
90 degrees
behind
phase
A
axis
when
theta
= 0 (Modified
Park)
(Ротор
на 90о отстает от оси фазы А когда
θ = 0 (Измененный Парк)), что бы выбрать
заданное положение ротора:
Выберите
Rotor
90 degrees
behind
phase
A
axis
when
theta
= 0 (Modified
Park)
(Ротор
на 90о отстает от оси фазы А когда
θ = 0 (Измененный Парк)), что бы выбрать
заданное положение ротора:
Измененное преобразование Парка более удобно для векторного контроля, потому что максимальная индукция фазы происходит при угле θ = 0.
Выберите Rotor aligned with phase A axis when theta =0 (Original Park) (Ротор направлен по оси фазы А когда θ =0 (Оригинальный Парк), чтобы выбрать заданное положение ротора: