

Вводы и выводы
Tm Simulink вход - механический вращающий момент на валу машины. Этот вход должен обычно быть положителен, потому что блок Permanent Magnet Synchronous Machine обычно используется как двигатель. Однако, Вы можете ввести отрицательный вращающий момент, если машина используется в режиме генератора.
m Simulink выход - вектор, содержащий 13 сигналов для синусоидальной трехфазной модели, 16 сигналов для синусоидальной пятифазной модели и 12 сигналов для трапециевидной модели. Вы можете выделить эти сигналы, используя блок Bus Selector из Simulink библиотеки.
-
Определение
Размерность
Символ
Номер сигнала
Синусоидальная модель
Трапециевидная модель
Ток статора is_a
A
ia
1
1
Ток статора is_b
A
ib
2
2
Ток статора is_c
A
ic
3
3
Ток статора is_q
A
iq
4
N/A
Ток статора is_d
A
id
5
N/A
Напряжение статора Vs_q
V
vq
6
N/A
Напряжение статора Vs_d
V
vd
7
N/A
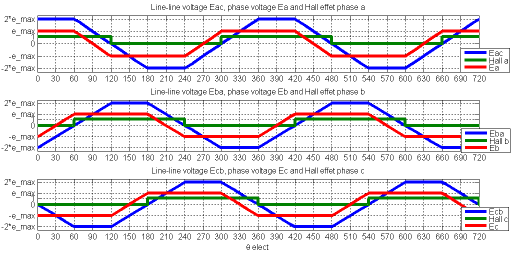
Фазовая противоэдс e_a
V
ea
N/A
4
Фазовая противоэдс e_b
V
eb
N/A
5
Фазовая противоэдс e_c
V
ec
N/A
6
Сигнал h_a датчика Холла*
логическая схема 0-1
ha
8
7
Сигнал h_b датчика Холла*
логическая схема 0-1
hb
9
8
Сигнал h_c датчика Холла*
логическая схема 0-1
hc
10
9
Скорость ротора wm
rad/s
ωr
11
10
Угол ротора
рад
Θr
12
11
Электромагнитный вращающий момент Te
N.m
Te
13
12
Сигнал датчика Холла обеспечивает логическую индикацию относительно обратного позиционирования ЭДС. Этот сигнал широко используется для управления непосредственно ключами питания. Сигнал появляется при каждом пересечении нуля фазового напряжения. Эти сигналы должны быть декодированы перед поступлением на выключатели.
Предположение
Блок Permanent Magnet Synchronous Machine имеет линейную магнитная систему без режима насыщения железа ротора и статора. Это предположение может быть сделано из-за обычно большого зазора в синхронной машине с постоянными магнитами.
Недостатки
При использовании блока Permanent Magnet Synchronous Machine в дискретных системах, Вам, возможно, придется использовать маленькую паразитную активную нагрузку, присоединенную ко входу, чтобы избежать числовых вибраций. Большее эталонное время требуют больших нагрузок. Минимальная активная нагрузка пропорциональна эталонному времени.
Лабораторная работа № 6
Моделирование асинхронного двигателя
f = 50 Гц; р = 2
№ |
марка |
P, Вт |
Uф, В |
Iнф, А |
R1, Ом |
R’2, Ом |
Lm, Гн |
L1, Гн |
L’2, Гн |
J, кгм2 |
cosφ |
1 |
4А56А4 |
120 |
220 |
0.43 |
97.72 |
72.48 |
1.91 |
2.046 |
2.155 |
2.75.10-4 |
0.693 |
2 |
4А71А4 |
550 |
220 |
1.58 |
16.39 |
15.08 |
0.624 |
0.663 |
0.7015 |
0.0011 |
0.737 |
3 |
4А80А4 |
1100 |
220 |
2.66 |
9.53 |
5.619 |
0.447 |
0.484 |
0.476 |
0.0026 |
0.822 |
4 |
4А112М4 |
5500 |
220 |
11.1 |
1.32 |
0.922 |
0.164 |
0.169 |
0.1715 |
0.0206 |
0.822 |
5 |
4А132М4 |
11000 |
220 |
24.53 |
0.462 |
0.312 |
0.0876 |
0.0903 |
0.0916 |
0.0463 |
0.876 |
6 |
4А180М4 |
30000 |
220 |
54.97 |
0.16 |
0.078 |
0.0489 |
0.05 |
0.051 |
0.2245 |
0.91 |
7 |
4А250М4 |
90000 |
220 |
158.5 |
0.032 |
0.019 |
0.0215 |
0.022 |
0.022 |
1.142 |
0.921 |
Параметры электрического двигателя известны.
1. Воспользуйтесь моделью асинхронный двигатель с короткозамкнутым ротором в SimPowerSystem. Постройте систему с
а) синусоидальным источником питания;
б) ШИМ регулятором синусоидального типа.
2. Проведите моделирование; как влияет форма сигнала на а) мощность двигателя, б) на время пуска. Сравните результаты.
3. Постройте частотные характеристики асинхронного двигателя: М(f) и ω(f) при неизменном напряжении питания.
4. Запустите трехфазный двигатель от однофазной цепи через конденсатор. Примерное соотношение 15 мкФ на 1 кВт. Как изменился пусковой процесс? Какова стала мощность?
ДОПОЛНЕНИЕ