

Метрология и стандартизация / Rossiyskaya metrologicheskaya entsiklopediya. Tom 1 (Okrepilov) 2015
.pdf117
измерения ВФВ V заданием трех скалярных величин. Эти три проекции могут быть выбраны по-разному, при этомкаждомувыбранномувариантусоответствуетвыбор определенной системы координат. При этом чаще всего встречаются три варианта:
1.Измеряются модуль V вектора V и два угла (первый – между направлением вектора и заданной плоскостью, а второй – между проекцией и осью на указанной плоскости); этому соответствует задание ВФВ в сферическойсистемекоординат. Эточащевсеговстречаетсяв приборах, предназначаемыхдляопределениякоординат удаленных объектов в пространстве. Могут решаться задачи определения только модуля вектора или только направления вектора в пространстве.
2.Измеряются составляющие Vx, Vy, Vz вектора в прямоугольной системе координат или проекции на любыетриоси, приэтомнаправлениеэтихосейдолжно бытьтемилиинымобразомопределено. Затем, еслиэто требуется, расчетным путем определяется модуль ВФВ (как корень квадратный из суммы квадратов проекций)
иуглы ориентации вектора, (через направляющие косинусы углов). Этот вариант, как правило, реализуется тогда, когда измерения ВФВ производятся с помощью трех одноосных СИ с взаимно ортогональными ИО, он типичен для рабочих автономных измерений на подвижныхобъектах, когданаправлениевектораизменяется во времени и практически невозможно ориентировать измерительную ось по измеряемой ВФВ.
3.Определяются только углы, когда по осям карданова подвеса три ИП измеряют углы Эйлера-Крылова. Это типично для многих оптических и электронных ориентаторов.
Задачи определения направлений ВФВ в пространстве, их хранения и воспроизведения были исключены из классической метрологии на основании того, что направление не является физической величиной. Важные, актуальныеипрактическирешаемыевопросысохранения
ипередачинаправленийвпространстве, атакжевозникающихприэтомпогрешностейметрологиейнеизучались по указанным принципиальным соображениям. Кроме того, нужно учитывать, что выбор систем координат предусматривает задание направлений осей координат, что как будто тоже исключается из рассмотрения. Распространеномнение, чтовполнедостаточнометрологии плоскихуглов; однаковдействительностиэтоявносужает возможности применения общих понятий, поскольку направления могут определяться не только плоскими углами, а множеством других способов. Точное определениенаправленийвпространстведлярешениябольшой группыизмерительныхзадач(впервуюочередь, вастрономии, геодезии, а также в навигации) играет иногда не менеесущественную(аиногдаиболееважную) роль, чем точноеизмерениемодуляВФВ. Ввекторномисчислении, как разделе математики, задание «чистых» направлений осуществляетсявведениемортов, единичныхвекторовi, которые задают направления как самих векторов, так и осей координат. При этом сам вектор V представляется
ввиде произведения модуля на орт, т. е. V=iV. Если бы не приведенное выше возражение, в рамках метрологии можно было бы в случае необходимости рассматривать раздельно задачи измерения или того, или другого.
Если ВФВ существует как векторное поле во всех точках некоторой области пространства и существует распределение по пространству как функция координат V(x, y, z), тоизмерительнаязадачаквалифицируется, как задача определения этой функции. Если при этом распределение ВФВ зависит также от времени V(x, y, z, t), тополеявляется нестационарным. Приизучениинестационарных, непостоянных по пространству векторных полей также имеется своя специфика. В общем случае при измерении ВФВ в точках или малых областях пространстваполянеобходимознать(задаватьилиизмерять с требуемой точностью) координаты точек измерения в пространстве (обычно это делается по сеткам с точно известными координатами узлов или по последовательностям точек на контурах). Это требование относится к измерениям параметров полей любых величин (как скалярных, так и векторных).
Необходимо выделить важный частный случай измерений, когдавекторноеполеявляетсяпотенциальным, а подлежащая измерению векторная величина V представляет собой градиент потенциала скалярной величины Φ, т. е., когда V = grad Φ. При этом помимо прямых измерений часто, когда это возможно и целесообразно, совокупныеизмеренияградиентавмалойобластивблизи заданнойточкиосуществляютсяспомощьючетырехИП (непосредственно измеряющих разности потенциалов как скалярных величин). Три из них разнесены по трем направлениям относительно этой точки в пространстве (желательнопоосямпрямоугольнойсистемыкоординат). По этим разностям, как приближенные значения производных вычисляются параметры градиента.
Четыре разнесенных ИП потенциалов иногда конструктивно объединяют в единую измерительную систему(модуль). Естественно, дискретизацияпроцедуры определения производных приводит к дополнительным погрешностям измерений, которые необходимо учитывать. ВзависимостиотфизическойприродыВФВводних случаях бывает возможен только первый путь прямых измерений, в других случаях – только второй путь совокупных измерений.
При измерениях ТФВ, представляющих собой градиенты ВФВ, также используются совокупные измерения, для чего используется система, включающая определенное число ИП векторов в разнесенных точках пространства(обычночетырех, вначальнойточкеитрех вточках, смещенныхпоосям). Вэтомслучаеспомощью четырех ИП, три из которых разнесены относительно центравпространстве(желательнопоосямпрямоугольнойсистемыкоординат), непосредственноизмеряющих разности векторов, между точками по трем направлениям из начальной точки. Затем по этим разностям, как приближенные значения производных, вычисляются приращенияизмеряемойВФВ, обычнораздельнопопроекциям(вданномслучаеихдвенадцать), ивэтомслучае рассчитываются все компоненты измеряемой ТФВ как градиента. Поскольку система является информационно избыточной, то число измеряемых проекций можно уменьшить. Встречаются задачи, в которых ТФВ представляетградиентградиентаскалярнойвеличиныП, т. е. Т= grad (grad Π). Вэтихслучаяхсистемадлявыполнения совокупных измерений строится на совокупности ИП,

118
каждый из которых измеряет потенциал в своей точке. Составляющие тензора Т рассчитываются, как вторые разности. В классической схеме ИП, измеряющие проекции первого градиента, разносятся тройками по осям прямоугольнойсистемыкоординат. КакивслучаеизмеренийВФВ, четыреразнесенныхСИпотенциаловиногда конструктивно объединяют в единую измерительную систему (измерительный модуль).
Выбор методов построения или материальной реализации опорных систем отсчета (иногда их называют методами аппаратурной реализации систем координат) определяетсяконкретнойизмерительнойзадачей. Впростейшемслучае, чащевсегоприотносительныхизмерениях, системаотсчетаможетбытьсвязанасподвижным объектом, накоторомустанавливаютсясоответствующие СИ. Такделается, например, приизмерениипараметров деформацийнесущихконструкцийподвижныхобъектов относительно центральных частей, в частности, при измерении упругих перемещений под воздействием волнения(длякорпусакорабля) илитурбулентностивоздушнойсреды(дляконструкцийлетательныхаппаратов).
При определении и построении системы отсчета необходимоиметьопорнуюсистемукоординат, поотношениюккоторойопределяетсяположениедругихсистем координат, вкоторыхизмеряютсясоответствующиеВФВ. Это не исключает измерение ВФВ непосредственно в опорной системе координат. Для перехода от одной системыкдругойобычноиспользуетсяаппаратматричных преобразований. Аппаратурноэтовыражаетсявприменении средств измерения углов между парами осей обеих систем координат. Еще раз подчеркнем, что под осями понимаютсянематематическиепонятия, анаправления, определяемыесоответствующимибазовымиэлементами.
Дляреализацииопорнойсистемыкоординатиспользуют разные физические принципы и методы, важно, чтобы выбранная опорная система координат была определена своими параметрами с возможно более высокойточностьюидоступнадлярешенияпоставленной измерительнойзадачи. Приизмерениипараметровполей ВФВчастоприпереходеотточкикточкевобщемслучае приходится изменять также и ориентацию измерительных осей СИ, и при этом угловые параметры переориентации должны измеряться с высокой точностью, что необходимо учитывать.
По отношению к измерениям ТФВ реализуются те же общие подходы, но с учетом более сложных свойств этих величин. Результаты измерения ТФВ могут быть представлены в различной форме (при этом параметры углового положения системы координат должны быть заданыилиизмерены). Основнымиявляютсяследующие варианты:
1.Врезультате измерений должны бытьопределены все девять (для симметричных тензоров – шесть независимых) компонентовввыбраннойсистемекоординат,
2.Интереспредставляюттольконекоторыеэлементы тензора Т (один или несколько).
3.ДолжныбытьопределеныглавныезначенияТхх, Тyy, Тzz и направления главных осей в пространстве.
По отношению к углам поворотов для ТФВ существуют инварианты; первым инвариантом является сумма диагональных элементов I1= Txx+Тyy+Тzz. Задачи
определения инвариантов по результатам измерений встречаются довольно редко, однако свойство постоянства инвариантов часто используется как контрольное условие при численных преобразованиях (поворотах систем координат).
Погрешности измерения векторных величин
Погрешности, как важнейшие метрологические характеристики (МХ), применительно к СИ ВФВ и результатамизмеренийимеютсвоюспецифику, хотяобщий подход к представлению и описанию погрешностей (или неопределенности) измерения векторных величин, к методам их оценивания и нормирования в основных чертаханалогичентому, которыйимеетместоприизмерениискалярныхвеличин. ПогрешностьизмеренияВФВ включает основные составляющие: инструментальные погрешности СИ и погрешности метода измерений. Также сохраняются и общие подходы к оцениванию случайныхисистематическихсоставляющихуказанных погрешностей. Втожевремяимеютсяипринципиальные отличия. Здесь будут рассмотрены лишь самые общие вопросы определения, нормирования и расчета погрешностейизмеренияВФВ, детальноэтотвопросвсилуего широты выходит за рамки настоящей статьи.
Очевидно, что в общем случае погрешность измерения ВФВ является вектором, представляющим собой векторную разность измеренной ВФВ и «истинного» или «действительного» вектора этой величины (как отмечалось выше, понятие «значение» не применимо для ВФВ). Далее погрешности делятся на основные и дополнительные. Значительная часть дополнительных погрешностей обусловлена влияющими величинами, которыесамипосебемогутбытьскалярнымииливекторными. Аналогичное положение имеет место и для ТФВ.
Прирасчетесоставляющихпогрешностейизмерения свободных векторов, не изменяющихся при параллельномпереносевлюбуюточкуилиоднородныхвекторных полей, исходнымиявляютсялинеаризованныесоотношениявматричнойформе V= V*+ΘV. Здесь V* – вектор погрешностей измерения проекций вектора V на оси, а Θ – антисимметричная матрицамалогоугласуммарных погрешностей угловой ориентации системы координат, вкоторойпроизводитсяизмерение, иинструментальных погрешностей. Предполагается, что угловые погрешностиориентацииосейимеютместотольковследствиеповоротавсегоизмерительноготрехгранникакакжесткого целого (в действительности оси могут терять свойство взаимной ортогональности, и направления осей могут иметь независимые друг относительно друга угловые погрешности).
При измерении векторов, изменяющихся по пространству, или неоднородных векторных полей нужно учитывать погрешности положения точек измерения (расположения ИП). Если предполагать, что измерение вектора (по проекциям или иначе) осуществляется в точкепространства, длякоторойлинейноесмещениеотносительнономинальногозадаетсярадиусом– вектором r, то возникающий при этом вектор дополнительной

119
погрешностисточностьюдослагаемыхпервогопорядка малости будет определяться матричным выражением Н r, где Н – квадратная матрица (или тензор) частных производных всех проекций вектора V по всем координатам. Таким образом, хотя погрешность вектора есть вектор, но он выражается через тензор Н второго порядка. Для обусловленной смещением точки измерения составляющей погрешности неоднородного тензорного поля записывается аналогичное соотношение большей размерности: G r, где G – прямоугольная матрица размерности 3х27 частных производных всех компонент тензора по всем координатам. Это выражение может быть также представлено через тензор третьего ранга. Учет заранее известных свойств симметричности или антисимметричности позволяет уменьшать размерности. Можно провести некоторую аналогию между указанными погрешностями (их можно трактовать, как погрешности привязки к осям координат) и хорошо исследованными погрешностями привязки к оси времени при динамических измерениях.
Дополнительные погрешности, обусловленные влияющими воздействиями, с одной стороны, могут иметь различную природу, а с другой стороны, по-разному влиятьнарезультатыизмерений. Влияющиевоздействия могутбытьскалярными(например, температураокружающей среды) или векторными (например, виброускорения). В первом случае при линеаризации зависимостей целесообразно вводить коэффициенты влияния; они могут быть одинаковыми или различными для составляющихизмеряемоговектора, вовторомслучаевлияние задается матрицей-столбцом. Когда осуществляется измерение скалярной величины, а влияющее воздействие представляет собой вектор, то влияние задается матри- цей-строкой. Когда же при измерении ВФВ влияющее воздействие нужно представлять как вектор, коэффициенты влияния должны в общем случае определять воздействие каждой проекции воздействия на каждую проекциюдополнительнойпогрешности, ивоздействие задается квадратной матрицей коэффициентов влияния размерности3х3. ПриэтомосикоординатдлявектораV и векторавлияющеговоздействиямогутбытьразличными. Кроме того, могут быть различными сочетания типов координат (например, прямоугольные и сферические). Вкачествепримераможнопривестиизвестныйфактзависимостидополнительнойпогрешностиотвоздействия силы тяжести, когда погрешность существенно зависит отугловойориентациипрецизионногоСИотносительно вертикали. Известны измерительные задачи, в которых линеаризованные представления неприемлемы, тогда используют более сложные модельные представления дополнительныхпогрешностей(например, ввидерядов разложений в степенные ряды при сохранении нескольких слагаемых).
Погрешность измерения Т тензорной физической величины Т представляет собой тензор того же ранга и той же размерности. Как и в случае ВФВ при расчете погрешностей измерения ТФВ нужно учитывать погрешности угловой ориентации системы координат, по осям которой измеряются компоненты тензора. Тогда исходнымиявляютсялинеаризованныематричныесоотношениявида Т=( Т)+Θ-1ТΘ, где Θ – антисимметрич-
ная квадратная матрица малого угла поворота (матрица погрешностейугловойориентациисистемыкоординат). При нормировании погрешностей измерения ТФВ в основном применимы те же подходы, что и при измерении ВФВ. Однако следует иметь в виду, что при учете корреляционных зависимостей между компонентами и при измерении параметров ТФВ по пространству необходимо вводить в рассмотрение тензоры третьего ранга или совокупности матриц размерности 3х3.
Вотношении динамических погрешностей до сих пор нет единства описания представления с другими погрешностями (для статических режимов измерений). Однако во многих важных случаях, когда эти погрешности малы, может быть сохранен такой же подход, как к прочим дополнительным погрешностям, если ограничиться определенными видами функциональных зависимостей от времени.
Для ВФВ в каждом конкретном случае погрешности V измерений зависят от измерительной задачи, метода использованиярезультатаизмеренияиметодаизмерения. Принципиальнымявляетсято, чтовсоставпогрешности измеренияВФВнарядуспогрешностьюсредстваизмеренияеемодуляипогрешностьюустановкивходиттакжеи погрешностьсредстваппаратурнойреализациисистемы отсчета. Внеевходятпогрешностисредстваппаратурной реализации базовой системы координат и погрешности средств, обеспечивающих преобразование перехода от этой системы к системе, в которой осуществляется измерение ВФВ). Рассмотрим некоторые примеры, поясняющие вышеизложенное.
Вслучаях, когда ИО СИ представляется возможным совместить с требуемой точностью с направлением измеряемой ВФВ (например, при определении аномалий гравитационного ускорения поляЗемли) погрешностью угловой ориентации часто можно пренебрегать, так как прималых углахмежду указанными направлениями эта погрешностьимеетвторойпорядокмалости(пропорциональна квадрату этого малого угла). Намного сложнее обстоит дело, когда направление ВФВ или известно с низкойточностью, илинаправлениенеизвестноиможет изменятьсявширокихпределах(тогдаоноопределяется порезультатамизмеренийпроекцийВФВнаосисистемы отсчета). Вэтомслучаеприходитсяучитыватьнесколько обстоятельств:
– аппаратурныеметодыисредствазаданиянаправлений разных осей системы отсчета могут быть неравноточными;
– в зависимости от условий измерения могут быть неравноточными и средства измерения составляющих ВФВпоосямсистемыотсчета(например, приизмерении параметров движения в условиях Земли могут иногда существенно различаться погрешности измерения вертикальных и горизонтальных составляющих ускорений движения);
– погрешности СИ, ИО которых направлены по той или иной оси системы отсчета, могут существенно зависетьотугловмеждунаправлениемВФВинаправлениямиэтихосейвследствиепоперечнойчувствительности (хотякбольшинствуСИВФВпредъявляетсятребование низкой поперечной чувствительности и эти требования выполняются);

120
–специфические погрешности могут возникать при измеренииВФВвслучаедажемалыхперемещенийчувствительного элемента СИ в процессе измерения, когда модульВФВявляетсяфункциейлинейногоразмера(например, на центрифуге, при измерении центробежного ускорения акселерометром имеет место перемещение чувствительного элемента, что приводит к появлению дополнительной погрешности);
–длямногихВФВвстаетзадачаихизмерениянафоне другой ВФВ, имеющей ту же природу, но представляющей собой влияющий фактор. Примером яляется измерениепараметровэлектромагнитногополя, создаваемого исследуемым устройством, на фоне электромагнитного поляЗемлиилиизмерениеускорениядвижущегосятела нафонегравитационныхускорений, эквивалентных, как известно, ускорениям движения.
Вопросы калибровки средств измерения векторных величин
Целью калибровки СИ ВФВ является определение метрологических характеристик (МХ), перечень которых обычно значительно шире, чем для СИ скалярных величин. НекоторыеизМХ(например, смещениянулей) определяютсякалибровкойСИвестественныхусловиях (естественные высокостабильные векторные поля иногдаможнорассматриватькакэталоны), нанеподвижном (возможно, специальностабилизированном) основании, при экранировании от электромагнитных полей и т.п.
Важнейшими являются калибровочные характеристики. Если они близки к линейным, то при обработке данныхрассчитываютсякоэффициентыпреобразования (как коэффициенты линейных аппроксимаций) и нелинейныеотклонения. Обычноите, идругиеопределяются независимопопроекциямилисоставляющимВФВ. Для многих современных СИ со встроенной электроникой, с возможностями регулировки и введения поправок и пр. существенны индивидуальные различия МХ (тем более при реализации подобных настроек) и при этом становится неясным, как нормировать погрешности СИ. Эти общие вопросы метрологии важны, но далее не обсуждаются.
Вдальнейшем рассматриваются основные вопросы, возникающие при калибровке СИ ВФВ на калибровочныхустановках(стендах), которыевметрологиирассматриваются как меры (обычно многозначные, способные воспроизводитьмодуливектороввопределенныхдиапазонахстребуемойточностью). Есливекторноеполепри калибровке СИ, установленного на платформе стенда, в принципе неоднородно, то обычно принимаются меры для того, чтобы неоднородность была возможно меньше. Например, для уменьшения неоднородности полей центробежных ускорений (или сил) предпочтительным считаетсяувеличениеразмеровповоротныхстолов. ВоспроизводимыенастендахВФВприкалибровкеданными СИ, взависимостиотихназначения, могутиметьсмысл измеряемых или влияющих факторов.
Всвязи с задачами калибровки необходимо четкое определениенаправленияВФВвпространстве. Остановимся на понятии «измерительная ось» одноосных ИП
ВФВ. При установке СИ, при монтаже его на объекте
врабочем режиме или на платформе стенда при калибровке задается требуемое направление номинальной измерительной оси (ИО), и предполагается, что в процессе выполнения рабочих измерений осуществляется измерение проекции ВФВ именно на эту ось. Однако для точных измерений нужно учитывать угловое отклонение реальной ИО от номинальной. Определение ориентации реальной ИО относительно установочных баз представляетсобойсамостоятельнуюзадачу. Стенд, как средство воспроизведения ВФВ при калибровке, задает как ее модуль, так и направление. Углы, определяющие направление измерительной оси СИ относительно его баз или установочных элементов, определяются и/или уточняются по результатам калибровки СИ. Тем самым расширяется понятие калибровки для СИ ВФВ.
При калибровке предпочтительным считается установканаплатформекалибруемогоСИтакимобразомпо направлениюреальнойИО, чтобыпогрешностьизмерениямодуляВФВ(онабудетрассмотренадалее) быламинимальной. ПосколькуСИустанавливаетсянаплатформе средства калибровки своими базовыми установочными элементами, полученная в процессе калибровки характеристикажесткосвязанаспараметрамиэтихэлементов. Приэтоммогутбытьсущественнымикаклинейные, так
иугловые погрешности положения баз относительно чувствительного элемента и/или его центра.
Внекоторых случаях в процессе калибровки СИ регулировкиположениябазовыхустановочныхэлементов можно целенаправленно изменять, задавая требуемое направление ИО. Чаще всего в качестве направления ИО выбирают такое, при котором выходной сигнал СИ максимален(тогдаэтоосьмаксимальнойчувствительности). Иногда выбирают направление ИО из условий минимальнойпоперечнойчувствительности, авнекоторых случаях (например, для приборов маятникового типа, у которыхнаправлениеосимаксимальнойчувствительностиможетзависетьотмодулявоспроизводимойнастенде
иизмеряемойВФВ) выбираютнекоторое«интегральнооптимальное» подиапазонувоспроизводимойвеличины направление ИО.
Часто базовые установочные элементы являются нерегулируемыми, тогда измеряются с необходимой точностьюпараметрыугловогоположенияИОивносятся
впаспорт СИ, чтобы обеспечить возможность введения поправокприрабочихизмеренияхнаобъекте. Очевидно, что погрешность установки СИ на платформе средства воспроизведения ВФВ и погрешности изготовления базовыхэлементовСИвходятвпогрешностьопределения направления ИО СИ, а, следовательно, и в погрешности последующих рабочих измерений ВФВ.
Рассмотрим методы определения направления ВФВ при использовании измерительной системы, включающей три одноосных СИ сначала с взаимно ортогональными осями. Совместив ИО трех СИ с направлением осей выбранной прямоугольной системы координат, по трем измеренным составляющим ВФВ вычислительно определяются ее модуль и направление. Заметим, что нередко измеряются не три, а большее число проекций ВФВнаразныеоси, приэтомосуществляетсясовместная обработка данных (например, по методу наименьших
121
квадратовилисиспользованиемробастныхалгоритмов), при этом достигается большая точность и, главное, большая метрологическая надежность результатов измерений. Аналогичныепроцедурыкалибровкиприменяются и тогда, когда выходные сигналы СИ не являются проекциями вектора, а связаны с ними определенными функциональнымисоотношениямиилидифференциальными уравнениями.
Обратимвниманиеещенанекоторыеспецифические особенности калибровки и поверки СИ ВФВ. Погрешность измеряемой ВФВ представляет собой вектор той же размерности, в общем случае не совпадающий по направлению с ИО. Как уже отмечалось, в процессе калибровкиопределяетсяважнаяметрологическаяхарактеристика СИ ВФВ – углы, определяющие направление его ИО относительно установочных баз или элементов. Необходимо различать номинальную и реальную ИО. Ориентация номинальной ИО СИ обычно задается параллельнойилиперпендикулярнойустановочнымбазам. Естественно, что эти углы и показатели их точности должныбытьприведенывпаспортеСИ. Какотмечалось выше, реальнаяИОопределяетсяприаттестациииликалибровке неоднозначно, илиизусловийравенства нулю коэффициентов преобразования по перпендикулярным составляющим вектора, или из условия, чтобы коэффициент преобразования модуля вектора был максимален. Желательно, чтобы в процессе калибровки направление ИО совпадало с требуемой точностью с направлением вектора воспроизводимой ВФВ; тогда погрешности калибровки, вызванные поперечными составляющими, остаются малыми, но в любом случае их необходимо оценивать. Принципиально возможно не регулировать угловое положение ИО в процессе калибровки, при условии, что с требуемой точностью определяются углы между направлением ИО и плоскостями установочных баз или элементов и выставлять соответствующим образом СИ на платформе средства калибровки.
Является предпочтительным, чтобы для средства воспроизведения ВФВ угловая ориентация между направлением воспроизводимой при калибровке ВФВ и плоскостьюплатформы, накоторойбазируетсяСИ, была определенастребуемойточностьюификсирована. Тогда при соответствующей установке ИО СИ может быть сведенокминимумувлияниепоперечныхсоставляющих воспроизводимой ВФВ. Однако возможны случаи, когда выполнение этого условия не позволяет обеспечить воспроизведениенесколькихзначенийпроекцийВФВи требуемую точность воспроизведения ВФВ. Например, этоимеетместопривоспроизведениипостоянныхлинейных ускорений и калибровке линейных акселерометров методомповоротанаплатформеделительнойголовкина неподвижномоснованиивгравитационномполеЗемли. Вэтомслучаеотносительноустановочнойбазысредства воспроизведения ускорения фиксируется направление составляющей ускорения свободного падения в данной точкеЗемли; втораяегосоставляющаяперпендикулярна этому направлению и является поперечной составляющей для калибруемого СИ и является источником дополнительной погрешности. При этом погрешность калибровки (или поверки) СИ тем меньше, чем меньше его поперечная чувствительность. Таким образом, в
данном случае требование малой поперечной чувствительности СИ является общим для режимов измерения и калибровки.
Процедура калибровки СИ ВФВ путем изменения модулявоспроизводимойвеличины(послеопределения
иточнойвыставкинаправленияИО) практическиничем не отличается от калибровки СИ скалярных величин. Это же относится к определению функций влияния, за исключением присущей только СИ ВФВ поперечной чувствительности. Для ее определения могут быть использованы установки для воспроизведения ВФВ. СИ устанавливается на них таким образом, чтобы ИО была перпендикулярнанаправлениювоспроизводимогоускорения. МногокомпонентныеСИ, частопредставляющие собой сборку однокомпонентных, обычно калибруются
иповеряются заданием вектора по направлению каждой из ИО отдельно или переустановкой с измененной угловойориентацией. УстановкидлязаданияВФВодновременно по нескольким направлениям существуют, но обычно используются лишь как испытательные, а не калибровочные.
При определении динамических характеристик СИ ВФВспомощьюсоответствующиходноосныхкалибровочных установок задаются требуемые законы изменения модуля и знака ВФВ во времени при сохранении направления. Общие подходы к методам калибровки в динамических режимах остаются теми же, что и при калибровкеСИскалярныхвеличин. Однако, какправило, существенно более сложными являются установки для воспроизведения ВФВ вследствие необходимости точного сохранения направления ИО. При этом возможно появление специфических для конкретной установки погрешностей калибровки, обусловленных, например, поперечными составляющими или «перекосами». Во многих случаях важна необходимость учета многих факторов в процессе решения измерительной задачи, нахождения и оценки погрешностей измерения векторных величин. Часто решение этих задач существенно сложнее, чем в случае измерения скалярных величин.
Общие принципы нормирования погрешностей СИ ВФВ более сложны, чем при нормировании погрешностей СИ скалярных величин. В ряде случаев имеется определенная специфика, вытекающая из конкретной измерительной задачи. Применительно к задаче совместного измерения всех составляющих измеряемой ВФВвыделимнекоторыедостаточнораспространенные случаи определения МХ:
–погрешности Vx, Vy, Vz проекцийVx, Vy, Vz вектораV наосинормируютсянезависимо(например, экстремальными значениями, пределами систематических составляющих, средними квадратическими значениями центрированных случайных составляющих);
–учитываются статистические или вероятностные связиилизависимостимеждуними, приэтомпараметрами случайной погрешности являются девять элементов ковариационнойматрицыпроекций(илисоставляющих) размерности 3х3;
– нормируетсятолькомодуль| V| вектора V погрешности, именно такой простейший способ наиболее распространен на практике (например, при оценке запасов прочности по механическим напряжениям);

122
– нормируютсятолькопогрешностиизмеренияуглов (как в астрономии).
Приопределениипогрешностейизмеренияскалярной величиныилиВФВпопространствуполя(приизмерении параметроввекторныхполей) необходимодополнительноучитыватьпогрешностиопределениякоординатточек, в которых находятся измерительные преобразователи (иногда выделяемых в специальную группу градиентометров). Этидополнительныепогрешностивыражаются черезполяградиентов(полеградиентовскалярногополя представляет собой поле ВФВ). В первом приближении эта частная погрешность определяется через градиент измеряемой ВФВ, этот градиент представляет собой тензор, имеющий девять компонентов. При матричном представлении проявляется взаимосвязь векторных и тензорных измерений. При измерениях неоднородных полей ВФВ бывает существенной конечность размеров измерительных преобразователей, в некоторых важных случаях ее можно значительно уменьшить, используя имеющиеся в конструкторской документации данные о положениицентрачувствительногоэлементапервичного преобразователя относительно баз СИ.
Методыкалибровкииповерки, используемыедляСИ ВФВ, ивозникающиеприэтомпогрешностизависяткак от воспроизводимой величины в процессе калибровки, такиотусловийеепроведения. Неблагоприятностьусловийпроявляется, например, тогда, когдапринципиально невозможно экранировать (отделить) воспроизводимую ВФВ от физической величины, воздействующий на ИП точно таким же образом, но являющейся, по существу, влияющей величиной (например, при воспроизведении линейных ускорений в гравитационном поле Земли). Встречаются и такие ситуации, когда подобная экранировка принципиально возможна, но при доступных технических средствах недостаточна и не обеспечивает требуемой точности калибровки.
Реализация аппаратурной системы координат с требуемымиточностнымихарактеристикамиврядеслучаев играетважнуюрольвпроцессекалибровки. Вчастности, привоспроизведенииикалибровкепараметровдвижения методомлинейноперемещающейсяплатформы, накоторуюустанавливаетсяСИ, отклоненияотгоризонтальной плоскости при ее движении приводят к погрешности калибровки, вызванной появлением составляющей гравитационногоускоренияпонаправлениюИОСИ. Кроме того, имеются погрешности из-за поперечной чувствительности, что ведет к повышению нижней границы диапазона воспроизводимых параметров. Аналогичная ситуация имеет место при калибровке акселерометров методом поворота на делительной головке вокруг горизонтальной оси в гравитационном поле Земли, когда подобноеограничениесвязаносточностьюопределения положения горизонтальной плоскости.
На Земле в качестве опорной системы координат предпочтительна система, в которой определена горизонтальнаяплоскостьиотвеснаялиния, рассматриваемая как направление, перпендикулярное горизонтальной плоскости. Вертикаль места определяется с помощью средств точного задания и измерения угла, равного 90˚ относительногоризонтальнойплатформы, наклоныкоторойконтролируютсяпрецизионнымиуровнями. Хотядля
определения вертикали часто используются различные приборы маятникового типа, этот путь вряд ли можно считатьоптимальным. Этообъясняетсятем, чтопереход от реализуемого с помощью маятника вертикального направлениякреальнойвертикальнойплоскости, накоторойбазируетсяисследуемоеСИ, можетбытьсопряжен
сотносительно большими погрешностями. Наиболее сложной является задача высокоточного однозначного определения азимутальных углов двух фиксированных относительно географической системы координат направлений в горизонтальной плоскости.
Вдинамических режимах наиболее распространеннымявляетсязаданиеприкалибровкезаконаизменения во времени одной проекции вектора на определенную ось (обычно вертикальную). Такие калибровочные стенды называются одноосными. Поворотные одноосные стенды воспроизводят углы поворота, угловую скорость и угловое ускорение (они одинаковы для всех точек платформы) или линейные ускорения (различные для точек платформы и образующие поле, линейное по координатам). Существуют также двухосные и трехосные поворотные стенды (они обычно строятся по схеме кардановаподвеса). Онипредусматриваютвозможности задания независимо законов изменения соответственно двух или трех составляющих угловой скорости.
Динамические стенды поступательных движений обычно позволяют задавать малые перемещения, обычно они представляют собой вибростенды. Как правило, воспроизводимой ФВ считается виброускорение. Для акселерометров, которые могут рассматриваться как самостоятельныеСИилиИП, виброускорениепредставляет собой измеряемую ФВ, для других СИ – влияющее воздействие.
При калибровке СИ ВФВ в динамических режимах задаютсятиповыезаконыизменениявовременивиброускорений. Чащевсеговоспроизводитсярежимодноосной синусоидальной вибрации, при этом результаты кали- бровкипредставляютсяввидеамплитудно-частотныхха- рактеристик. Прималостидинамическихпогрешностей (как правило, при низких частотах) для этих амплитуд- но-частотных характеристик могут быть использованы простые аппроксимации. Кроме того, в системах управлениямногихвибростендовпредусматриваетсязадание полигармонических и случайных виброускорений. При созданииодноосныхстендовсерьезныетрудностипредставляетжесткоеограничениемалымизначениямибоковыхперемещенийиугловповорота. Существуютмногоосныевибростенды, способныезадаватьсогласованные или несогласованные законы перемещения по осям, но они не получили широкого распространения. Известны такжестенды, воспроизводящиеслучайныевоздействия
сзадаваемымиспектральнымихарактеристиками, ноони используютсядляиспытаний напрочностьистойкость,
ане для определения МХ.
Выводы
Методы калибровки и поверки средств измерения тензорных величин с полным учетом их специфики к настоящему времени не проработаны. Обычно в тех

123
случаях, когда СИ ТФВ строится как система, включающая совокупность разнесенных в пространстве СИ ВФВ, калибровка осуществляется поэлементно. При возможности осуществляется такое воспроизведение ТФВ, когданоминальновглавныхосяхонаимееттолько одну ненулевую компоненту.
В недалеком прошлом калибровочные стенды проектировались и создавались в единичных экземплярах или малыми сериями. В настоящее время ряд ведущих приборостроительных фирм серийно выпускает гаммы типоразмеров стендов. Часто допускаются по заказам требуемые модификации (например, для воспроизведения комбинированных воздействий). Аппаратура всех
современныхстендовхарактеризуетсявысокимуровнем автоматизации, возможностями программного задания различных законов изменения во времени воспроизводимых ФВ, регистрации данных и, если требуется, их статистическойобработки. Однаковажнейшиеоперации точного базирования СИ остаются за операторами и выполняютсявручную. Многиеизстендовпредназначаются для испытаний на метрологическую надежность. Однако для калибровки высокоточных СИ ВФВ и ТФВ обеспечение аттестованной и сертифицированной прецизионной стендовой базы, «покрывающей» потребности точного приборостроения, остается актуальной и сложной проблемой.
И.Б. Челпанов
2.4.8. Методики измерений
Терминологический аспект
В основополагающих документах по метрологии присутствует несколько терминов и определений, раскрывающихпонятие«методикаизмерений» (таблица1).
Приведенные в таблице термины и определения свидетельствуют о высокой степени гармонизации понятия методика измерений в международных и отечественных документах. Вместе с тем следует отметить, что в [1-3]
четко разделеныметодизмеренийиметодикаизмерений,
тогда как в Федеральном законе № 102 «Об обеспечении единства измерений» [4] и в национальном стандарте [5] для второго понятия установлен составной термин
методика (метод) измерений. Практика применения
102-ФЗвпериодс2009 по2014 г. неподтверждаетполезноститакогосоединения, всвязисчемвбудущемможно ожидать возвращения к термину методика измерений. Можно также прогнозировать постепенное вытеснение этимтерминомменеесоответствующегонормамрусского языка термина методика выполнения измерений.
Исторический экскурс
Методики выполнения измерений (МВИ) стали объектом деятельности метрологов с начала 1970-х гг., в период формирования Государственной системы обеспечения единства измерений (ГСИ). Внимание к МВИ было обусловлено пониманием того, что точность косвенныхизмеренийзависитнетолькоотметрологических характеристик применяемых средств измерений, но и от метода, процедуры и условий измерения, а также действий оператора. В 1972 г. был разработан стандарт [6], установивший общие требования к стандартизации и аттестации МВИ. Опираясь на этот стандарт, органы государственной и ведомственных метрологических служб стали участвовать в разработке МВИ, выполняя их метрологическую экспертизу и/или аттестацию. В 1990 г. накопленный опыт был обобщен в стандарте [7], который был заменен межгосударственным стандартом
[8], а затем [3].
Начиная с 1993 г. МВИ подвергаются законодательному регулированию. В закон РФ «Об обеспечении единства измерений» [9] включается статья «Методики выполнения измерений», вкоторойуказывается, чтоизмерениядолжныосуществлятьсявсоответствиисразработанными и аттестованными в установленном порядке методиками. Впринятомв2008 г. 102-ФЗ[4] требование о проведении измерений по аттестованным методикам (методам) измерений было ограничено измерениями, на которые распространяется сфера государственного регулирования обеспечения единства измерений.
Законодательные нормы были раскрыты в ГОСТ
Р8.563-96 «ГСИ. Методикивыполненияизмерений» [10]
изаменившем его национальном стандарте [5].
Внастоящее время методики измерений стали предметом деятельности широкого круга метрологов. Одни из них устанавливают требования к методикам, другие непосредственно участвуют в их разработке, третьи оцениваютсоответствиеразработанныхметодик установленным требованиям, четвертые осуществляют метрологический надзор за наличием и соблюдением требований методик. Активное участие в этой деятельности (главным образом в форме аттестации методик) принимаютсотрудникигосударственныхнаучныхметрологическихинститутовигосударственныхрегиональных центров метрологии. В феврале 2015 г. в Федеральном информационномфондепообеспечениюединстваизмеренийпредставленаинформацияо18189 аттестованных методиках измерений. Наибольшее количество из них относитсяктремвидамизмерений: физико-химическим (7072), электрическим и магнитным (5239), расхода, вместимости, уровня и параметров потока (5087).
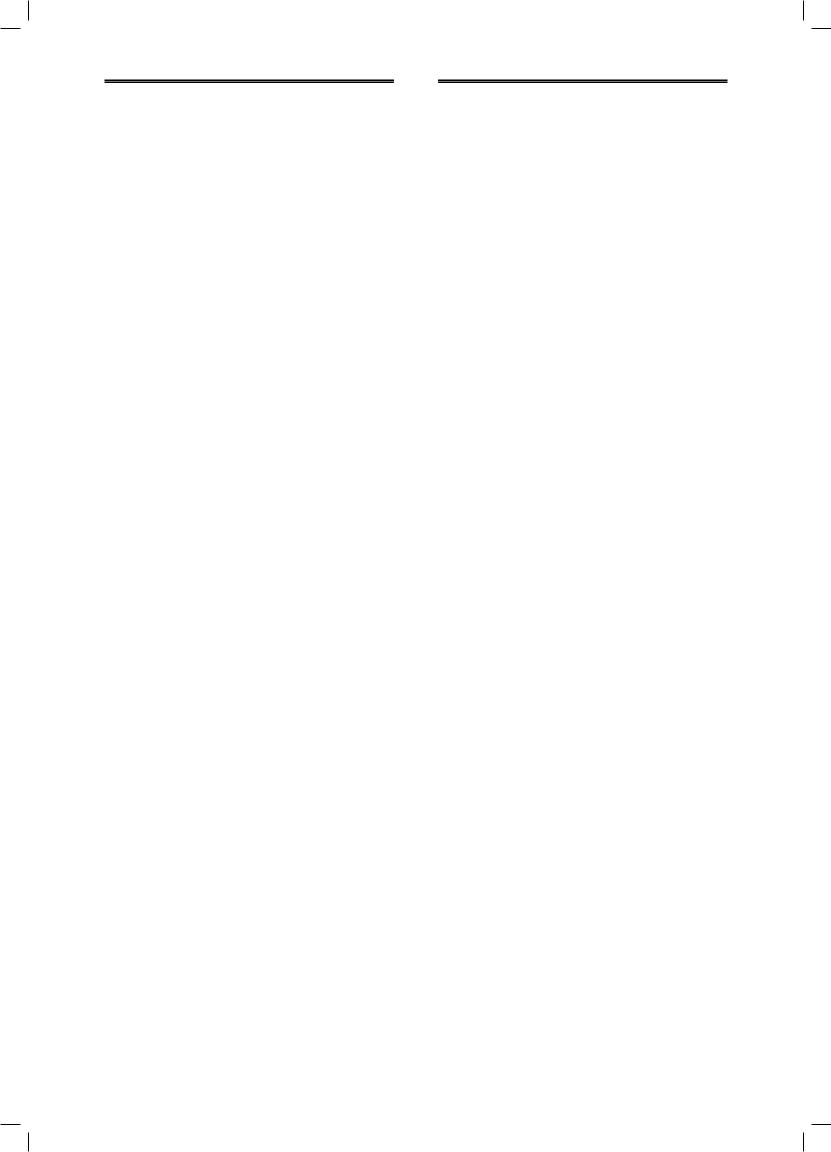
Этапы разработки методик измерений
ЭтапыразработкиМИвобщемвидепоказанынарис.1. ИсходнымиданнымидляразработкиМИявляютсяее назначение (объекты, измеряемая величина и интервал еезначений), областьприменения(например, конкретная лабораторияилисетьлабораторий), условияизмерений,

124
основныевлияющиефакторы, требованиякпоказателям точностиизмерений, способрегламентации (отдельный документ или раздел документа, распространяющегося на объект), вид отдельного документа (например, стандартпредприятия, инструкция, методическиеуказания), возможность применения в сферах государственного регулирования и др.
Измерения, выполняемыевходеиспытаний(контроля, тестирования, диагностики), часторегламентируются в разделах технических условий, конструкторских документов, технологических инструкций, руководств. В таких случаях соответствие методик установленным требованиям обычно оценивается в рамках метрологическойэкспертизыпроектовперечисленныхдокументов. Если МИ регламентируется отдельным документом, более распространена процедура аттестация (в сфере госрегулирования она является обязательной).
При регламентации МИ встречаются ситуации, когда документ называют методикой определения (того или иного показателя объекта) или методикой количественного химического анализа (КХА). Использование метрологической терминологии стимулируется повышенными требованиями к достоверности информации о физико-химических свойствах и химическом составе различныхобъектов, атакжезакономерностямиразвития самой метрологии. Проявлением этого процесса (процесса метризации) стало распространение стандартов [5, 7, 8, 10] на методики КХА как специфические методикиизмеренийиотражениевстандартахособенностей таких методик.
Отличительным признаком документов на МИ является их структура и содержание. В общем случае они включают следующие разделы [5]:
1.Назначение и область применения.
2.Показатели точности измерений.
3.Условия измерений.
4.Метод измерений.
5.Средства измерений, стандартные образцы, вспомогательные устройства, материалы, реактивы.
6.Требования безопасности, охраны окружающей среды.
7.Требования к квалификации операторов.
8.Подготовка к выполнению измерений.
9.Выполнение измерений.
10.Обработка результатов измерений.
11.Оформление результатов измерений
12.Контроль точности результатов измерений.
13.Приложения (справочные данные, схемы и др.). Рекомендации по разработке методик измерений со-
держатся в [11-15].
Показатели точности измерений, выполняемых по методикам измерений
Данныепоказатели(таблица2) характеризуютлюбые результаты измерений, полученные при соблюдении требований и правил методики. Показатели точности и диапазон измерений формируют понятие метрологиче-
ские характеристики методики, а сочетание метроло-
Таблица 1. Понятие «методика измерений» в нормативных документах
Обозначение |
Термин и определение |
Примечания |
|
документа |
|||
|
|
||
|
|
|
|
|
|
1. Методику измерений |
|
|
методика измерений, процедура измерений (англ. – mea- |
обычно описывают доста- |
|
|
точно подробно и пред- |
||
|
surement procedure) – детальное описание измерения в |
ставляют в виде документа, |
|
VIM-3 [1] |
соответствии с одним или более принципами измерений |
позволяющего оператору |
|
и данным методом измерений, которое основано на моде- |
выполнить измерение |
||
|
|||
|
ли измерений и включает вычисления, необходимые для |
2. Методика измерений мо- |
|
|
получения результата измерения. |
жет включать информацию |
|
|
|
о целевой неопределенно- |
|
|
|
сти измерений. |
|
|
|
|
|
|
методика измерений, методика выполнения измерений – |
Обычно методика изме- |
|
РМГ 29-2013 [2] |
установленная логическая последовательность операций |
рений регламентируется |
|
|
и правил при измерении, выполнение которых обеспечи- |
каким-либо нормативным |
|
|
вает получение результатов измерений в соответствии с |
документом. |
|
|
принятым методом измерений. |
||
|
|
||
|
|
|
|
|
методика выполнения измерений – установленная |
|
|
ГОСТ 8.010-2013[3] |
логическая последовательность операций и правил при |
|
|
измерении, выполнение которых обеспечивает получе- |
|
||
|
|
||
|
ние результатов измерений в соответствии с принятым |
|
|
|
методом измерений. |
|
|
|
|
|
|
102-ФЗ (2008 г.) [4] |
методика (метод) измерений – совокупность конкретно |
|
|
описанных операций, выполнение которых обеспечивает |
|
||
ГОСТ Р 8.563-2009 [5] |
|
||
получение результатов измерений с установленными по- |
|
||
|
|
||
|
казателями точности. |
|
|
|
|
|

125
гических и других характеристик называют рабочими характеристикамиметодики(performance measurement techniques).
Наиболее распространенные показатели точности вместе с рекомендациями по их представлению (оцениванию, установлению) перечислены в таблице 2.
Примечание1. Нарядустерминомстандартноеот-
клонение применяются термины среднеквадратическое отклонение и среднее квадратическое отклонение.
Примечание 2. Предел повторяемости (промежуточной прецизионности, воспроизводимости) – зна-
чение, которое с доверительной вероятностью 95 % не превышается модулем разности между результатами двух измерений, полученными в соответствующих условиях повторяемости. Данное значение называют также допускаемым расхождением, допустимым расхождениемиликритическойразностью(вэтомслучае указывают количество измерений и доверительную вероятность).
Показатели точности устанавливают в абсолютной или относительной форме таким образом, чтобы их можно было связать с каждым измеренным значением в диапазоне измерений. Это достигается представлением показателя в виде одного числового значения для диапазона измерений, ряда значений для ряда поддиапазонов, либо уравнения, связывающего значение показателя со значением измеряемой величины. В последнем случае чаще всего применяют линейные двучлены.
Показатели1-1 и1-2 можнорассматриватькаканалоги: и тот, и другой представляют собой интервал вокруг измеренного значения величины, при оценивании того и другого суммируются по определенным правилам все существенные составляющие. В отечественных методиках измерений расширенную неопределенность
стали применять 20 лет назад; в настоящее время ею постепенно замещают доверительные границы погреш-
ности. Данные показатели точности особенно полезны в тех случаях, когда измерения проводят в целях оценки соответствияобъектаустановленнымнормам[25]. Ино-
гда наряду с доверительными границами погрешности
устанавливают дополнительно доверительные границы еесоставляющих: случайнойинеисключеннойсистема-
тической [19, 20, 23].
Показатели 2, 4, 5 относятся к группе показателей прецизионности. Показатели, относящиесякодинаковым условия, связаны между собой: предел повторяемости можетбытьвычисленумножениемСКОнакоэффициент, зависящийотзаконараспределения измеряемойвеличины. Принормальномзаконеэтоткоэффициентравен2,8. Показатели 2-1 и/или 2-2 устанавливаются для всех методик, заисключениемметодик, распространяющихсяна объекты, идентичностькоторыхвусловияхповторяемостинеможетбытьобеспечена. Обычновтакихметодиках предусмотрены однократные измерения. В тех случаях, когда предусмотрено несколько измерений, показатели 2-1, 2-2 могут устанавливаться как для промежуточных, так и для окончательных результатов измерений.
Показатели 3-1 и/или 3-2 устанавливаются применительно к условиям (режимам ) работы в конкретной лаборатории. Они применяются при сопоставлении результатов, полученных в этой лаборатории в разных условиях.
Показатели4-1 и/или4-2 устанавливаютвметодиках, применяющихся во многих лабораториях. Обычно, эти показатели устанавливают при стандартизации методики на основе результатов специально спланированных межлабораторныхэкспериментов. Наосновепоказателей воспроизводимости могут быть сделаны обоснованные заключенияокачествеработылабораторийвситуациях, когда отсутствуют признанные опорные значения измеряемой величины [26].
Систематическиепогрешностилабораториииметода (показатели 5 и 6) приводятся в методиках измерений
Рис. 1. Основные этапы разработки методики измерений

126
Таблица 2. Показатели точности измерений
№ |
Наименование |
Назначение |
Дополнительные |
Рекомендации |
|
п/п |
показателя |
(Применение) |
сведения |
||
|
|||||
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
|
|
|
Расширенная |
Включается в результат из- |
Приводится с указа- |
|
|
|
нием коэффициента |
[16], [17], |
|||
1-1 |
неопределенность |
мерений вместе с измеренным |
|||
охвата и/или уровня |
[18] |
||||
|
измерения |
значением величины. |
|||
|
доверия. |
|
|||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Приводится с указа- |
|
|
|
|
|
нием доверительной |
|
|
|
|
Включается в результат из- |
вероятности. |
|
|
|
Доверительные границы |
Применяются также |
|
||
1-2 |
мерений вместе с измеренным |
[19], [20] |
|||
погрешности измерения |
термины: суммарная |
||||
|
значением величины. |
|
|||
|
|
погрешность, харак- |
|
||
|
|
|
|
||
|
|
|
теристика погреш- |
|
|
|
|
|
ности. |
|
|
|
|
|
|
|
|
2-1 |
Стандартное отклонение |
Характеризует разброс результа- |
Применяются также |
|
|
|
повторяемости |
тов измерений в условиях повто- |
|
||
|
термины: СКО |
|
|||
|
(СКО повторяемости) |
ряемости (идентичные объекты, |
|
||
|
сходимости, предел |
[21], [22] |
|||
|
|
одна лаборатория, один оператор, |
|||
|
|
сходимости. |
|
||
|
|
одно оборудование, короткий |
См. примечания 1, 2. |
|
|
2-2 |
Предел повторяемости |
период времени). |
|
||
|
|
||||
|
|
|
|
|
|
3-1 |
Стандартное отклонение |
|
При варьировании |
|
|
|
промежуточной прецизи- |
|
|
||
|
|
одного из влияющих |
|
||
|
онности (СКО промежу- |
Характеризует разброс резуль- |
|
||
|
факторов применяют- |
|
|||
|
точной прецизионности) |
татов измерений в условиях |
|
||
|
ся термины, указыва- |
|
|||
|
|
промежуточной прецизионности |
[21], [22], |
||
|
|
ющие на этот фактор, |
|||
|
|
(идентичные объекты, одна лабо- |
[23] |
||
|
|
ратория, разные операторы, обо- |
например, предел |
|
|
|
|
межоператорской |
|
||
|
|
рудование, калибровка, время). |
|
||
|
Предел промежуточной |
прецизионности. |
|
||
|
|
|
|||
|
|
См. примечания 1 и 2. |
|
||
3-2 |
прецизионности* |
|
|
||
|
|
|
|||
|
|
|
|
|
|
4-1 |
Стандартное отклонение |
Характеризует разброс резуль- |
|
|
|
воспроизводимости |
|
|
|||
|
татов измерений в условиях |
|
|
||
|
(СКО воспроизводимости) |
|
[21], [22], |
||
|
воспроизводимости (идентичные |
См. примечания 1 и 2. |
|||
|
|
объекты, разные лаборатории, |
[24]. |
||
|
|
|
|
||
|
Предел воспроизводимо- |
операторы, оборудование, кали- |
|
|
|
4-2 |
бровка, время). |
|
|
||
сти* |
|
|
|||
|
|
|
|
||
|
|
|
|
|
|
|
|
Характеризует отклонение мате- |
|
|
|
|
Систематическая погреш- |
матического ожидания результа- |
|
[21], [22], |
|
5 |
тов измерений в отдельной лабо- |
|
|||
ность лаборатории |
|
[23] |
|||
|
ратории от принятого опорного |
|
|||
|
|
|
|
||
|
|
значения измеряемой величины. |
|
|
|
|
|
|
|
|
|
|
|
Характеризует отклонение мате- |
|
|
|
|
|
матического ожидания результа- |
|
|
|
6 |
Систематическая погреш- |
тов измерений во всех лаборато- |
|
[21], [22] |
|
ность метода |
риях, применяющих методику, |
|
|||
|
|
|
|||
|
|
от принятого опорного значения |
|
|
|
|
|
измеряемой величины. |
|
|
|
|
|
|
|
|