

Основной закон динамики вращательного движения твердого тела.
Для момента импульса системы частиц относительно некоторой оси Z справедлива формула
 ,
где MZ – суммарный момент
внешних сил относительно оси вращения.
,
где MZ – суммарный момент
внешних сил относительно оси вращения.
С учетом того, что LZ =
IωZ, запишем

Принимая во внимание, что I – величина
постоянная, а
 Z
– угловое ускорение, приходим к
выражению IZMZ.
Z
– угловое ускорение, приходим к
выражению IZMZ.
Это уравнение называется основным уравнением динамики вращательного движения твердого тела относительно неподвижной оси. Оно аналогично уравнению второго закона Ньютона maZ FZ.
Роль массы в этом уравнении играет момент инерции, роль линейного ускорения – угловое ускорение, роль результирующей силы – суммарный момент внешних сил.
Решение этого уравнения – основная задача динамики вращения твердого тела. Зная момент инерции I тела относительно оси вращения и зависимость от времени его угла поворота φ(t), можно найти суммарный момент MZ всех внешних сил, действующих на тело, относительно оси вращения. И наоборот, зная момент инерции I тела относительно оси вращения, действующий на тело суммарный момент MZ всех внешних сил относительно оси и начальные условия (угловую скорость ω0Z и угол поворота тела φ0 в начальный момент времени), можно найти зависимость угла поворота от времени φ(t).
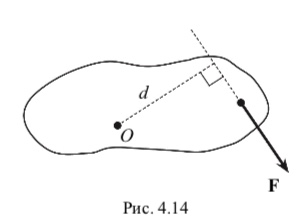
В частном случае, когда сила F, приложенная к телу, перпендикулярна оси вращения Z, момент этой силы относительно оси равен MZ Fd, где F – модуль силы; d – ее плечо относительно оси вращения, которое представляет собой кратчайшее расстояние от оси вращения до линии действия силы (рис. 4.14).
Если на тело, имеющее ось вращения, действует одновременно несколько сил, перпендикулярных оси, то суммарный момент этих сил относительно нее равен алгебраической сумме моментов этих сил относительно данной оси:

где Mi – моменты сил относительно данной оси. При этом моменты сил, вращающие тело против часовой стрелки, принято считать положительными, а по часовой – отрицательными.
Момент инерции. Кинетическая энергия вращения.
Найдем выражение момента импульса твердого тела L относительно оси вращения Z. Спроектировав L на эту ось, получим LZ LZi, где LZi – момент импульса i-й частицы твердого тела относительно оси Z.
Момент импульса i-й частицы относительно точки O, лежащей на оси вращения, по определению равен Li miri,vi, где ri – радиус-вектор, определяющий положение частицы массой mi относительно точки O; vi – скорость этой частицы (рис. 4.13). 58
Из рис. 4.13 видно, что LZi Licosi.
Поскольку векторы ri и vi взаимно перпендикулярны (это легко доказать, пользуясь соображением, что частица описывает окружность в плоскости, перпендикулярной оси Z), имеем Limirivi
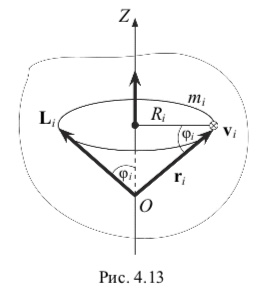
Тогда LZi mirivicosI miRivi miZRi2, где Ri – радиус окружности, которую описывает частица; ωZ – угловая скорость, с которой твердое тело вращается вокруг оси Z (а значит, и частица).
С учетом этих выражений получаем LZ LZi miZRi2 ZmiRi2 miRi2Z.
Заметим, что полученное выражение момента импульса твердого тела не зависит от положения на оси вращения точки O, относительно которой определяется момент импульса тела L.
Обозначим величину, стоящую в скобках, буквой I, тогда LZ IZ.
Скалярная величина I miRi2, равная сумме произведений элементарных масс на квадрат их расстояний до некоторой оси, называется моментом инерции тела относительно оси. Таким образом, момент инерции тела зависит от распределения масс относительно оси. Из определения также следует, что момент инерции – величина аддитивная, т. е. момент инерции тела относительно некоторой оси равен сумме моментов инерции частей тела относительно той же оси.
Выражение для I является приближенным, причем тем более точным, чем меньше элементарные массы mi. Следовательно, задача нахождения момента инерции в общем случае сводится к интегрированию:
I r2dmr2dV,
где
 – плотность тела; dm – элементарная
масса.
Под dV следует понимать
физически бесконечно малый объем, т. е.
такой, который, с одной стороны, достаточно
мал для того, чтобы макроскопические
свойства вещества можно было считать
в его пределах одинаковыми, а с другой,
достаточно велик для того, чтобы не
могла проявиться дискретность
(прерывистость) вещества. Интеграл
следует брать по всему объему тела.
– плотность тела; dm – элементарная
масса.
Под dV следует понимать
физически бесконечно малый объем, т. е.
такой, который, с одной стороны, достаточно
мал для того, чтобы макроскопические
свойства вещества можно было считать
в его пределах одинаковыми, а с другой,
достаточно велик для того, чтобы не
могла проявиться дискретность
(прерывистость) вещества. Интеграл
следует брать по всему объему тела.
Моменты инерции некоторых однородных твердых тел относительно оси Zc, проходящей через центр масс тела, приведены в таблице.
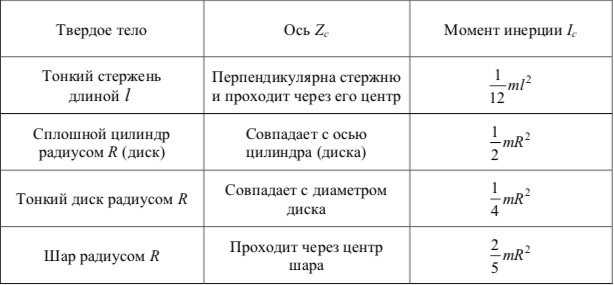
Зная момент инерции Ic относительно оси, проходящей через центр масс тела, можно определить момент инерции I относительно любой параллельной ей оси, отстоящей от нее на расстояние a: IIc ma2, где m – масса тела. Это равенство выражает собой теорему Штейнера.
Когда тело вращается вокруг неподвижной оси с угловой скоростью ω, элементарная масса mi, отстоящая от оси вращения на расстояние Ri, обладает скоростью vi Ri.
Следовательно, ее кинетическая энергия равна
![]() Так
как кинетическая энергия – величина
аддитивная, для всего тела
Так
как кинетическая энергия – величина
аддитивная, для всего тела
Или, учитывая определение момента инерции,
![]()
где I – момент инерции тела относительно оси вращения; ω – его угловая скорость.
Эта формула аналогична выражению кинетической энергии материальной точки и поступательно движущегося тела. Роль массы играет момент инерции, а роль линейной скорости – угловая скорость.
Пусть тело массой m совершает плоское движение, т. е. такое, при котором все его точки движутся в параллельных плоскостях. Любое плоское движение можно представить как совокупность поступательного движения и вращения, причем это деление на поступательное и вращательное движение можно осуществить множеством способов. Наиболее удобным оказывается деление плоского движения на поступательное, происходящее со скоростью центра инерции vc, и вращение вокруг оси, проходящей через этот центр. В таком случае кинетическая энергия тела равна
где первое слагаемое – кинетическая энергия поступательного движения тела, а второе – кинетическая энергия его вращательного движения.