

Вынужденные колебания. Резонанс.
Для поддержания колебаний в системе необходимо, чтобы на нее действовала сила, работа которой компенсировала бы уменьшение механической энергии. Эта сила должна быть переменной, так как постоянная сила может только изменить положение равновесия, но не способствовать поддержанию колебаний в системе.
Колебания, возникающие в системе под действием внешней переменной силы, называются вынужденными. Переменная сила, поддерживающая в системе незатухающие колебания, называется вынуждающей.
Рассмотрим простейший частный случай вынужденных колебаний в среде, заключающийся в том, что на систему действует сила, которая изменяется со временем по гармоническому закону: F F0 cost, где F0 – амплитуда силы; – круговая частота изменения силы со временем.
Помимо вынуждающей силы на тело действуют квазиупругая сила и сила сопротивления. Тогда колебания описываются дифференциальным уравнением (второй закон Ньютона)
mаkx rvF0 cost
или
где f0 F0 /m.
С течением времени собственные колебания в системе затухнут, следовательно, вынужденные колебания происходят с частотой вынуждающей силы.
Решение уравнения установившихся вынужденных колебаний имеет вид
x Аcos(t0), где A – амплитуда вынужденных колебаний; 0 – сдвиг фаз; он представляет собой величину отставания по фазе вынужденного колебания от обусловившей его вынуждающей силы
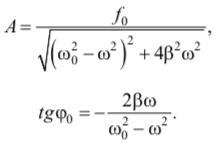
Амплитуда А зависит от соотношения между частотой вынуждающей силы и собственной частотой 0 колебательной системы (рис. 7.6): амплитуда А вынужденных колебаний увеличивается при приближении часто- ты вынуждающей силы к собственной частоте 0 колебательной системы. Это явление называется резонансом, а частота рез, при которой амплитуда достигает максимального значения Аmax, называется резонансной частотой. Кривые зависимости значения амплитуды А от частоты (рис. 7.6) называются резонансными кривыми. Форма этих кривых и значение Аmax зависят от характера сил сопротивления среды, в которой совершаются колебания. Резонансная амплитуда тем больше (кривые 1 и 2), чем меньше сопротивление среды (β2 < β1). Резонансная кривая 3 относится к случаю, когда сопротивление в среде отсутствует (β3 = 0). Если на колеблющуюся систему действует постоянная сила, то колебания не совершаются, и отклонение системы от положения равновесия А0 = f0/ω02 называется статической амплитудой.

Явление резонанса используется в разных областях техники – в акустике, в электротехнике и т. д. При эксплуатации различных конструкций, находящихся под воздействием периодических внешних нагрузок, явление резонанса может приводить к их выводу из строя.
Физический и математический маятник. Период колебаний маятника.
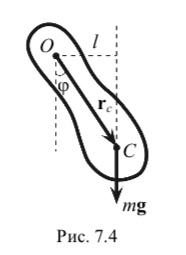
Физическим маятником называется абсолютно твердое тело, совершающее колебания под действием силы тяжести вокруг неподвижной горизонтальной оси, не проходящей через его центр масс.
На рис. 7.4 изображено произвольное тело массой m, колеблющееся вокруг оси O (ось O перпендикулярна плоскости чертежа), C – центр масс, l – плечо силы тяжести.
Пусть ось вращения (качания) маятника является осью Z декартовой системы координат с началом в точке O. Свяжем положительное направление этой оси с положительным направлением отсчета угла поворота φ правилом правого винта. (Примем направление отсчета угла φ против часовой стрелки за положительное.) Тогда ось Z будет направлена «к наблюдателю».
Если силами трения в подвесе маятника можно пренебречь, то момент относительно оси Z создает только его сила тяжести mg. Под действием этой силы при отклонении маятника на угол φ в положительном направлении возникает вращательный момент этой силы относительно точки O
M rc, mg, направленный в противоположную оси Z сторону. Тогда проекция вектора M на эту ось
MZ Mrcmgsinmgl Вместе с тем согласно основному уравнению динамики вращения твердого тела

Так какZ d/dt, это уравнение можно переписать в виде
где I – момент инерции маятника относительно оси качания Z. При малых колебаниях маятника (угол φ мал) sinφ ≈ φ, и уравнение принимает вид дифференциального уравнения гармонических колебаний,
решение которого имеет вид
Аcos(0t
),
где
![]() –
собственная частота колебаний
физического маятника, зависящая, как
видно из приведенной формулы, от массы,
момента инерции тела и расстояния между
осью вращения и центром масс. Так как
ω0 = 2π/T, период колебаний
физического маятника T определяется
выражением
–
собственная частота колебаний
физического маятника, зависящая, как
видно из приведенной формулы, от массы,
момента инерции тела и расстояния между
осью вращения и центром масс. Так как
ω0 = 2π/T, период колебаний
физического маятника T определяется
выражением
Математическим маятником называется материальная точка (частица), подвешенная на невесомой и нерастяжимой нити (длиной l) и совершающая колебания в вертикальной плоскости под действием силы тяжести. Математический маятник представляет собой предельный случай физического маятника, вся масса m которого сосредоточена в его центре масс, так что rc l, I ml2. Период колебаний математического маятника зависит только от его длины и ускорения свободного падения:

Возвращающей силой в этом случае является проекция силы тяжести на направление движения (mgsin). Для постоянства коэффициента k, а следовательно, и частоты колебаний 0, необходимо постоянство длины нити l. Между тем составляющая силы тяжести mgcos, действующая вдоль нити, может вызывать ее удлинение, которое будет минимальным в крайних положениях и максимальным при прохождении тела через положение равновесия. Поэтому для того, чтобы колебания маятника были гармоническими, кроме малости углов отклонения необходимо иметь еще и условие нерастяжимости нити.
II. Молекулярная физика и термодинамика