

2533
.pdfматематических и других величин, а также условные графические обозначения должны соответствовать стандартам и быть едиными во всей записке. Не допускается одной буквой обозначать различные термины. Значения символов и числовых коэффициентов, входящих в формулу, должны быть приведены непосредственно под формулой и для каждого символа даны в той последовательности, в какой они даны в формуле. Первая строка начинается со слова «где» без двоеточия после него.
Размерность одного и того же параметра в пределах записки должна быть постоянной. В нашем случае – это Н; мм; МПа; об/мин и т.д.
Все формулы располагают посередине текста и нумеруют в пределах раздела арабскими цифрами. Номер формулы состоит из номера раздела и порядкового номера формулы, разделенных точкой. Номер указывают в конце правой стороны листа на уровне формулы в круглых скобках, например (4.1).
Ссылки в тексте на номер формулы дают в скобках. Например, «… в формуле (4.1) …». Допускается нумерация формул в пределах всей записки, но это внесет неудобства при исправлении.
Пример. Формула и значения символов, входящих в нее,
σu =Mu / Wu, |
(4.1) |
где σu – нормальное напряжение от изгиба, МПа; Mu – изгибающий момент, Н·мм; Wu – осевой момент сопротивления, мм3. Подставляя числовые значения, получим
σu = 100 / 2,5 = 40 МПа.
Между последней цифрой и обозначением размерности нужно ставить пробел.
В тексте пояснительной записки дают ссылки на литературные источники в виде номера источника согласно списку литературы, приведенному в конце пояснительной записки. При этом номер источника выделяют косыми чертами, например, «… принимается коэффициент концентрации напряжений от наличия шпоночной канавки Кб = 1,6, табл. 8.5 /12/».
Текстовую часть и расчеты записки следует сопровождать иллюстрациями: схемами, эскизами, эпюрами и т.д. Количество иллюстраций должно быть достаточным для пояснения излагаемого текста.
Например, уточненный расчет нужно начинать с эскиза вала, с помощью которого объяснить принимаемые допущения:
–обоснование принятия вала как балки равного сечения на двух опорах;
–места расположения сил;
–выбор координат и др.
Иллюстрации нумеруются арабскими цифрами в пределах раздела. Номер состоит из номера раздела и порядкового номера иллюстрации, разделенных точкой. Например, рис. 1.3. При необходимости иллюстрации могут иметь подрисуночный текст.
Результаты основных этапов расчетов оформляют в виде таблиц. Например, «Основные параметры зацепления», «Основные размеры и эксплуатационные характеристики подшипников» и т.д. В правом верхнем углу над таблицей указывают ее порядковый номер, например «Таблица 4.2».
Объем и содержание пояснительной записки. Пояснительная записка является конструкторским документом, и ее примерный объем составляет 25…30 листов формата А4. Она содержит описание устройства, принцип его действия и расчеты.
Пояснительная записка (ПЗ) состоит из следующих разделов:
–титульный лист – страница 1;
–содержание – страница 2;
–задание на курсовой проект – страница 3;
–введение – страница 4.
1.Назначение, область применения и краткое описание изделия.
2.Кинематический расчет механизма.
3.Силовой расчет механизма.
4.Эскизная компоновка редуктора.
5.Уточненный расчет редуктора.
6.Выбор системы смазки.
7.Выбор посадок.
8.Перечень использованной литературы.
Титульный лист оформляется по образцу (прил. 1) и является первой страницей записки, он не нумеруется.
Содержание оформляется по образцу (прил. 2) и является второй страницей записки. Оно не нумеруется.
Задание на курсовой проект оформляется по образцу (прил. 3) и является третьей страницей ПЗ. Кинематическая схема берется из задания, а номер задания М 07.03 обозначает: М – механика, 07 – последняя цифра шифра студента, 03 – предпоследняя цифра шифра студента. Шифром студента называется номер зачетной книжки и студенческого билета.
Введение оформляется по образцу (прил. 4).
1. Назначение, область применения и краткое описание изделия. Это первая глава ПЗ. Она состоит из 3-х параграфов, которые составляются по
литературным источникам «Подъемно-транспортные машины», «Транспортные машины» и т.д. В эту главу входят параграфы:
1.1.Назначение и область применения изделия.
1.2.Краткое описание изделия (с иллюстрацией).
1.3.Описание редуктора и его устройств.
2.Кинематический расчет механизма. Это вторая глава ПЗ. Она состоит из следующих параграфов:
2.1.Выбор электродвигателя. При описании этого параграфа можно использовать пример расчета электрической тали [8, с.35]. Кроме этого, нужно использовать материалы практических занятий и учебное пособие [6, с.6]. Вначале определяют полезную мощность, затем расчетную мощность электродвигателя. По таблицам выбирают электродвигатель и выписывают его данные.
2.2.Кинематический расчет механизма. При написании этого параграфа используется пособие [6, с.8], пособие [8, с.35] и материалы практических занятий по механике. Для расчета применяют уравнение кинематического баланса. В расчете нужно обязательно определить отклонение в % реальной скорости рабочего органа, т.к. при выборе чисел зубьев редуктора была внесена погрешность.
3.Силовой расчет механизма. Состоит в определении крутящих моментов на валах и нагрузки на рабочий орган, которая изменяется в связи с выбором электродвигателя. Под нагрузкой на рабочий орган понимается вес поднимаемого груза (электроталь), сила на поршень (насос), тяговая сила ленты транспортера, крутящий момент на шнеке или крутящий момент камнедробилки и т.д. Так как табличная мощность электродвигателя NЭ.табл превосходит расчетную NЭ.расч при выборе электродвигателя, нагрузка на рабочий орган возрастает против заданной, поэтому необходимо определить в % возрастание этой нагрузки. Далее определяется модуль зубчатых колес редуктора и геометрические размеры зубчатых колес и зубчатого зацепления. Затем определяются силы в зубчатом зацеплении.
4.Эскизная компоновка редуктора. Для написания этой главы нужно использовать материалы учебных пособий [5] и [6], конспекты лекций, практических и лабораторных занятий. Эта глава состоит из следующих параграфов:
4.1.Определение диаметров шеек валов. По эмпирической формуле,
приведенной в пособиях и конспектах, определяется наименьший диаметр вала, который соответствует входной шейке dВ1 первого вала и выходной шейке dВ2 второго вала.
Затем по эмпирическим формулам определяется диаметр шеек под уплотнение, под подшипники, под зубчатое колесо, определяются диаметры буртов.
По диаметрам шеек под подшипники выбирают шариковые однорядные подшипники радиальные для цилиндрических редукторов и радиальноупорные для конических редукторов.
Для вала-шестерни конического редуктора нужно предусмотреть резьбовую шейку для гайки, стягивающей подшипники, см. пособия [5] и [6].
4.2.Эскизная компоновка валов. Этот параграф пишется на основании учебных пособий [5], [6], [7] и конспектов лекций, практических и лабораторных занятий. После необходимых расчетов эскизная компоновка вычерчивается на миллиметровке формата А3 или А2 в зависимости от размеров редуктора в масштабе 1:1.
4.3.Определение основных размеров элементов корпуса. Написание этого параграфа основывается на использовании пособий [5], [6], [7] и конспектов лекций, практических и лабораторных занятий.
5.Уточненный расчет редуктора. Эта глава состоит из пяти параграфов и пишется на основании конспектов лекций, практических занятий и учебных пособий [5], [6] и [7] .
5.1.Построение эпюр крутящих и изгибающих моментов ведомого
вала.
5.2.Определение эквивалентного момента в опасном сечении. 5.3. Проверка условий прочности вала.
5.4. Подбор и расчет шпонок.
5.5 Проверочный расчет подшипников.
6. Выбор системы смазки.
7.Выбор посадок.
Разделы (главы) 6 и 7 пишутся на основании учебных пособий [5], [6], [7]
иконспектов лекций.
1.НАЗНАЧЕНИЕ, ОБЛАСТЬ ПРИМЕНЕНИЯ И ОПИСАНИЕ
ИЗДЕЛИЯ
В первую очередь нужно составить список литературы, на которую необходимо делать ссылки в тексте пояснительной записки. Список оформляется на отдельном листе, и после написания пояснительной записки вкладывается в нее последним листом (см. лист № 3, Содержание).
1.1.Назначение и область применения изделия
На основании литературных источников описывается назначение и область применения станка, пресса или другой машины.
В назначении указывают, какую конкретную полезную работу может выполнить машина, какое качество выполняемой работы, какие варианты смежных работ может выполнять машина, диапазон ее возможностей.
Область применения показывает, в каких отраслях народного хозяйства, на каких конкретных предприятиях дорожного строительства, автохозяйствах, мастерских и т.д. может применяться данное изделие.
Приводится краткая классификация данного класса машин.
1.2. Описание изделия
Описание изделия разделяют на описание устройства его в статике (в неподвижном состоянии), а затем описывают принцип его действия.
1.2.1. Устройство изделия
Перечисляют части изделия на основании общего вида и кинематической схемы, т.е. детали и узлы, из которых состоит изделие (станок, пресс и т.д.).
Описывают взаимное расположение и соединение деталей в их последовательности. Называют рабочий орган и его связь с машиной. Источник движения, его характеристику и связь с машиной. Указывают назначение каждой детали.
1.2.2. Принцип действия изделия
Описывают рабочий процесс изделия, т.е. ту полезную работу, которую выполняет изделие. Описывают как, с помощью каких устройств или инструмента производится полезная работа, какое качество обеспечивает изделие и т.д.
Описывают движение деталей механизма, форму движений, их скорость и ускорение, взаимное давление одних деталей на другие, передаваемые силы или моменты. Описывают причины потерь мощности передаваемые силы или моменты. Описывают причины потерь мощности и факторы, влияющие на эти потери.
1.3. Описание редуктора и его устройств
Этот параграф пишется аналогично § 1.2, только вместо слова «изделие» нужно понимать слово «редуктор».
Можно использовать учебные пособия [5], [6], [7] .
2. КИНЕМАТИЧЕСКИЙ РАСЧЕТ МЕХАНИЗМА
Кинематический расчет механизма предназначен для определения основных его кинематических параметров: угловой скорости вращения всех валов или частоты их вращения, передаточных отношений всех передач, шага тягового вала, чисел зубьев зубчатых колес, звездочек и червячных передач, уточнения скорости рабочего органа.
В механизмах, предлагаемых заданиями на курсовое проектирование, применяются передачи: зубчатые, червячные, цепные, ременные, канатные; механизмы преобразования движений: канатные, винтовые, шнековые, ленточные; детали: зубчатые колеса, валы, подшипники, муфты.
Вспомним основные понятия о машинах и передачах, которые нужны для кинематического расчета.
Машиной называется механическое устройство, выполняющее полезную работу, которая обеспечивает производственный процесс, транспортирование, преобразование энергии и т.д. Машина состоит из трех основных частей: приводного двигателя, передачи и рабочего органа.
Рабочий орган машины совершает полезную работу. Для этого ему нужно сообщать траекторию движения, скорость и энергию. В контрольных заданиях рабочими органами являются: крюк электротали, подъемная платформа электроштабелера, транспортирующий шнек (винт), лента транспортера, поворотная платформа подъемного крана.
Двигатель, обычно электромотор или двигатель внутреннего сгорания, приводит в движение передачу и сообщает ей энергию.
Передача предназначена для преобразования вращательного движения двигателя в поступательное, вращательное или сложное движение рабочего органа с заданной скоростью и передачи энергии к рабочему органу. К передаче относятся все механизмы, расположенные между двигателем и рабочим органом.
Передача состоит из отдельных двухваловых механизмов вращательного движения, называемых тоже передачами: ременная, цепная, зубчатая, червячная, канатная, винтовая и т.д. В каждой передаче различают ведущее звено, передающее крутящий момент, и ведомое звено, приводимое в движение от ведущего. В передачах существуют кинематические и силовые соотношения. В каждой двухваловой передаче (рис. 2.1) различают ведущий или входной вал Ι и ведомый или выходной вал ΙΙ. Такая передача называется одноступенчатой. Основные параметры передачи: мощность N1 на ведущем валу и N2 на ведомом валу, скорость

вращения ω1 на ведущем валу и ω2 на ведомом или частоты вращения n1 и n2 соответственно.
Этих параметров достаточно для кинематического и силового расчетов любой передачи.
|
n1 ω1 |
N1 M1 |
z1 |
Производные
параметры: |
Ι |
M1 |
–коэффициент n1 ω1
полезного |
|
действия |
|
|
N2 |
M2 |
|||
(КПД) |
|
|
ΙΙ |
|
M2 |
||||
|
η12 = N2 |
/ N1 ; |
(2.1) |
|
|
||||
|
|
|
n2 |
ω2 |
|||||
|
|
|
|
|
|
||||
|
|
– окружная скорость z2 |
|||||||
|
|
|
|
|
n2 ω2 |
||||
|
ν = ω1 d1 / 2 = π d1 n1 / 60; |
(2.2) |
|
|
|
||||
|
|
Рис. 2.1 |
|
||||||
|
|
|
|
|
|
|
|||
– окружная сила передачи |
|
|
|
|
|
||||
Ft = N1 / ν = 2 M1 / d1 ; |
|||||||||
– |
|
|
|
||||||
крутящий момент на Ι-м валу |
|
|
|||||||
– |
|
|
|
M1 = N1 / ω1 = Ft· d1 / 2; |
|||||
передаточное отношение между валами Ι и ΙΙ |
|
|
|||||||
u12 = ω1 / ω2 = n1 / n2 = z2 / z1 = d2 / d1 ;
– передаточное число между валами Ι и ΙΙ
i12 = ω2 / ω1 = n2 / n1 = z1 / z2 = d1 / d2;
– отношения крутящих моментов на валах Ι и ΙΙ
d1
υ
d2
(2.3)
(2.4)
(2.5)
(2.6)
M1 |
|
N1 2 |
|
1 |
|
i12 |
, |
(2.7) |
M2 |
|
12 u12 |
|
|||||
|
N2 1 |
|
12 |
|
||||
где η12 – коэффициент полезного действия между валами Ι и ΙΙ; N1, N2 – мощности на Ι и ΙΙ валах; M1, M2 – крутящие моменты на валах Ι и ΙΙ;
– крутящий момент на ΙΙ-м валу
M2 = M1 · u12 · η12. |
(2.8) |
Здесь все параметры имеют размерность в системе СИ, кроме частоты вращения n1 и n2 – в об/мин.
Зубчатое колесо с меньшим числом зубьев называется шестерней, а с большим числом зубьев – зубчатым колесом или просто колесом.
Передачи двухваловые и многоваловые, заключенные в один корпус, называются редукторами. По числу передач редукторы различают одноступенчатые, двухступенчатые и т.д. Редукторы бывают цилиндрические, состоящие из цилиндрических зубчатых колес, конические, состоящие из конических зубчатых колес, червячные и комбинированные.
Общий КПД многоступенчатой передачи
η = η12· η13 · …· η(n–1)n . |
(2.9) |
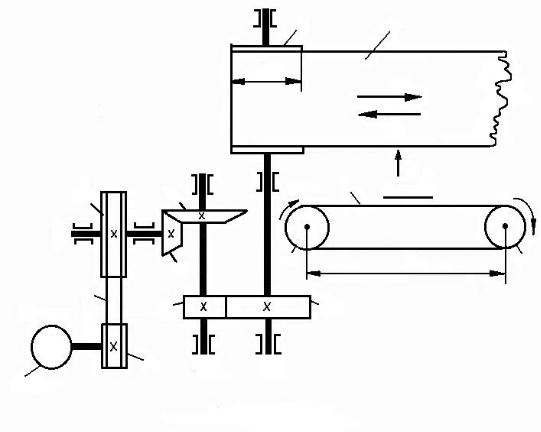
Кинематический расчет разберем на примере ленточного транспортера (рис. 2.2). Транспортер состоит из электродвигателя 1; ременной передачи, включающей шкивы d1 и d2, посаженные на валы І и ІІ, и ремня 2; конической передачи, включающей зубчатые колеса z1 и z2 , посаженные на валы ІІ и ІІІ, цилиндрической передачи, включающей зубчатые колеса z3 и z4, посаженные на валы ІІІ и ІV; барабана 3, посаженного на вал ІV, и ленты транспортера 4.
Двигатель 1 и вал І вращаются с частотой n1 и передают мощность N1 . Эти параметры, как правило, неизвестны. Лента транспортера 4 движется со скоростью ν и сопротивляется движению силой Ft. Сила Ft называется нагрузкой ленточного транспортера. Скорость ν и нагрузка Ft задаются. Пример. Заданием предусмотрено: скорость ν = 60 м/мин, нагрузка Ft = 2 кН, диаметр барабана dБ = 250 мм, синхронная частота вращения асинхронного двигателя nС = 1500 об/мин, КПД привода η = 0,75, передаточное отношение ременной передачи u12 = 2. Требуется провести кинематический расчет.
Электродвигатель через ременную передачу (d1 и d2) и две зубчатые передачи (z1 и z2 , z3 и z4) вращает вал ІV. Вал ІV, на который посажен барабан 3, называется тяговым валом. Справа на расстоянии l (см. вид а) устанавливается второй барабан 5. Оба эти барабана связаны лентой 4.
Барабан 3 – ведущий, барабан 5 – ведомый. При вращении ведущего барабана по часовой стрелке верхняя ветвь ленты движется слева направо со скоростью ν. На верхнюю ветвь барабана укладывают сыпучие тела, которые транспортер перемещает на длину l, а затем сбрасывает с себя на пол или в тару.
2.1. Выбор электродвигателя
Электродвигатель нужно выбрать в первую очередь, т.к. от его частоты вращения зависит передаточное отношение всей передачи и передаточные отношения отдельных передач. Кроме этого, двигатель является энергоносителем, от его мощности зависит нагрузочная способность машины, например тяговое усилие транспортера Ft . Полезная мощность
транспортера, которая затрачивается на перемещение сыпучих или штучных тел, определяется как произведение тягового усилия на скорость транспортера.
|
|
|
|
|
3 |
4 |
|
|
|
|
|
dБ |
|
υ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ft |
|
|
|
|
|
|
|
а |
|
|
d2 |
z2 |
|
υ |
4 |
Вид а |
|
|
|
|
|
|
|||
ΙΙ |
x |
x |
|
|
|
|
|
|
|
|
z1 |
3 |
|
l |
5 |
N1 n1 |
2 |
z3 |
|
|
z4 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
М |
Ι |
d1 |
ΙΙΙ |
ΙV |
|
|
|
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
Рис. 2.2
Полезная мощность транспортера, которая затрачивается на перемещение сыпучих или штучных тел, определяется как произведение тягового усилия на скорость транспортера.
Ne = υ · Ft , |
(2.10) |
где Ne – полезная или эффективная мощность, кВт; υ – скорость транспортера, м/с; Ft – тяговая сила, кН.
Подставляя значение скорости и нагрузки Ft из исходных данных, приведенных выше, получим (υ = 60 / 60 = 1 м/с)
Ne = 1· 2 = 2 кВт.
В стационарных машинах и станках применяют асинхронные двигатели единой серии 4А, которые изготавливают серийно на электромеханических заводах. Ниже приведена табл. 2.1, которая содержит двигатели мощностью от 0,25 до 30 кВт и синхронной частотой вращения 3000, 1500, 1000 и 750 об/мин.
Мощность электродвигателя называется затраченной мощностью, т.к. кроме полезной мощности она включает потери на трение в передачах,
которые учитываются коэффициентом полезного действия. Затраченная мощность определяется по формуле
|
|
|
N = Ne / η, |
|
|
|
(2.11) |
||||||
где N – затраченная мощность, кВт; η – КПД передач. |
|
|
|
||||||||||
Если η = 0,75, то подставляя в формулу 2.11, получим |
|
|
|
||||||||||
|
|
|
N = 2 / 0,75 = 2,67 кВт. |
|
Таблица 2.1. |
||||||||
|
|
Асинхронные двигатели единой серии 4А |
|||||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Мощность |
|
|
Синхронная частота, об/мин |
|
|
|
|||||||
3000 |
1500 |
|
1000 |
|
750 |
|
|||||||
Ne, кВт |
|
Тип и асинхронная частота вращения, об/мин |
|
||||||||||
|
Тип |
nЭ |
Тип |
|
nЭ |
Тип |
|
nЭ |
Тип |
|
nЭ |
||
0,25 |
А56В2 |
2760 |
A63A4 |
|
1380 |
A63B6 |
|
890 |
71B8 |
|
680 |
||
0,37 |
63А2 |
2750 |
A63B4 |
|
1365 |
71A6 |
|
910 |
80A8 |
|
675 |
||
0,55 |
63В2 |
2740 |
71A4 |
|
1390 |
71B6 |
|
900 |
80B8 |
|
700 |
||
0,75 |
71А2 |
2840 |
71B4 |
|
1390 |
80A6 |
|
915 |
90LA8 |
|
700 |
||
1,1 |
71В2 |
2810 |
80A4 |
|
1420 |
80B6 |
|
920 |
90LB8 |
|
700 |
||
1,5 |
80А2 |
2850 |
80B4 |
|
1415 |
90L6 |
|
935 |
100L8 |
|
700 |
||
2,2 |
80В2 |
2850 |
90L4 |
|
1425 |
100L6 |
|
950 |
112MA8 |
|
700 |
||
3 |
90L2 |
2840 |
100S4 |
|
1435 |
112MA6 |
|
955 |
112MB8 |
|
700 |
||
4 |
100S2 |
2880 |
100L4 |
|
1430 |
112MB6 |
|
950 |
132S8 |
|
720 |
||
5,5 |
100L2 |
2880 |
112M4 |
|
1445 |
132S6 |
|
965 |
132M8 |
|
720 |
||
7,5 |
112M2 |
2900 |
132S4 |
|
1455 |
132M6 |
|
970 |
160S8 |
|
730 |
||
11 |
132M2 |
2900 |
132M4 |
|
1460 |
160S6 |
|
975 |
160M8 |
|
730 |
||
15 |
160S2 |
2940 |
160S4 |
|
1465 |
160M6 |
|
975 |
180M8 |
|
730 |
||
18,5 |
160M2 |
2940 |
160M4 |
|
1465 |
180M6 |
|
975 |
200M8 |
|
730 |
||
22 |
180S2 |
2945 |
180S4 |
|
1470 |
200M6 |
|
980 |
200L8 |
|
730 |
||
30 |
180M2 |
2945 |
180M4 |
|
1470 |
200L6 |
|
980 |
225L8 |
|
735 |
||
Мощность электродвигателя и затрачиваемая мощность находятся в соотношении Ne ≥ N. По табл. 2.1 выбираем двигатель мощностью Ne = 3 кВт и частотой вращения nЭ = 1435 об/мин. Тип электродвигателя составляется из двух обозначений: единой серии 4А и типа, записанного в таблице 100S4. Складывая обозначения, получим 4А100S4.
2.2. Кинематический расчет
Теперь нужно выбрать передаточные отношения передач. Для этого составляют уравнение кинематического баланса, которое связывает скорости электродвигателя и рабочего органа между собой посредством произведения передаточных чисел и шага тягового вала. Составим последовательно шаг за шагом уравнение кинематического баланса (УКБ).
Определим частоту вращения второго вала (см. рис. 2.2)