2533
.pdfТолщина лент : Во 100...300 мм, 6 |
мм; Во 400...500, 8 мм; |
Во 600...1000 мм, 10 ммВо 800...1200 |
мм, 12...16 мм. |
Округляем полученный результат до Во 400 мм.
Диаметр шкива (барабана) зависит от толщины ремня и определяется
по формуле |
|
DБ (50...100) , |
(6.21) |
а ширина барабана (шкива) – по формуле |
|
ВБ (1,1...1,15)Во. |
(6.22) |
Диаметры барабанов и шкивов выбирают из ряда чисел: 40 – 45 – 50 – 56 – 63 – 71 – 80 – 90 – 100 – 112 – 125 – 140 – 160 – 180 – 200 – 225 – 250 – 280 – 315 – 355 – 400 – 450 – 500 – 560 – 630 – 710 – 800 – 900 – 1000 – 1120 – 1250 – 1400 – 1600 – 1800 – 2000 мм.
Для выбранного примера диаметр и ширина барабана:
DБ 50 8 400 мм,
ВБ (1,1...1,15) 400 450 мм.
Для определения тяговой силы Ft нужно найти вес груза, лежащего на всей длине транспортера, и коэффициент трения тяговой ветви транспортера.
Вес находят, как объем груза, помноженный на плотность и ускорение свободного падения, т.е.
G V g S l g, |
(6.23) |
где S – м2, l – м, – т/м3, g – м/с2, G – кН. Вес груза для выбранного примера
G 0,0234 22 1,4 9,81 7 кН.
Расстояние, т.е. шаг между роликами, выбираем t 0,5 м, тогда число роликовых опор (по 3 ролика в каждой опоре) равно
N (l/t) 1 (22/0,5) 1 45.
Если один ролик (на шариковых подшипниках) катить по плоскости, то его коэффициент трения будет складываться из двух: коэффициента трения подшипника fn 0,003...0,005 и коэффициента трения качения ролика по ленте fл 2 /dp , где 0,2 мм – плечо трения качения ролика
по ленте, dp – диаметр ролика, на котором лежит лента с грузом (см. рис. 6.1). Общий коэффициент трения тяговой ветви транспортера
f N(3fn fл) N(3fn 2 /dp ), |
(6.24) |
где N – число опор; 3 – число роликов в одной опоре; dp 0,25DБ .
Подставляя число опор в формулу (6.24), получим
f 45(3 0,004 2 0,2/100) 0,72.
Тяговая сила транспортера |
|
|
Ft |
f G, |
(6.25) |
или, подставляя вес груза, лежащего на транспортере, получим |
|
|
Ft 0,72 |
7 5 кН. |
|
При известных v и Ft кинематический и силовой расчеты транспортера выполняются согласно 2-й и 3-й главам настоящего пособия.
6.3.2. Винтовой конвейер (задание 9)
Шнековый, или винтовой конвейер, – это транспортная машина, предназначенная для перемещения сыпучих, кусковых и полужидких вязких тел. Может работать в горизонтальном, вертикальном или наклонном положении. Транспортирует уголь, руду, цемент, песок, металлическую стружку, отходы литейного производства, мясо, тесто, сырую резину и т.д.
Транспортер состоит (задание 9) из цилиндрического корпуса 1, внутри которого на подшипниках установлен шнек или винт 2, в горловину 3 подается перемещаемый груз, а через горловину 4 груз выходит из конвейера. При транспортировании груз заполняет все свободное пространство между витками.
Дальнейшие расчеты будут иллюстрироваться примером, соответствующим следующим исходным данным:
– производительность транспортируемого материала Q Qm 35 т/ч (массовая производительность);
–плотность материала 1,4 т/м3 (земля влажная);
–длина транспортера lш 15 м.
Массовая производительность показывает, какую массу груза перемещает конвейер в единицу времени. Принято массу измерять в тоннах (т) для больших конвейеров, а в качестве единицы времени выбирают один час (1ч).
Для геометрических расчетов больший интерес представляет объемная производительность, которая показывает объем груза, перемещаемый в единицу времени, т.е. м3/ч. Чтобы найти объемную производительность Qv , нужно массовую производительность Qm разделить на плотность :
Qv Qm / . |
(6.26) |
С другой стороны, объемная производительность равна произведению площади поперечного сечения S груза на его скорость, т.е.
Q |
S v |
|
(D2 |
d2 ) v |
|
(D2 |
d2 ) t |
|
n |
|
(6.27) |
|
|
4 |
|
|
|||||||||
v |
4 |
ш |
ш |
|
ш |
ш |
ш |
|
ш |
|
||
Примем следующие геометрические соотношения в винтовом |
||||||||||||
конвейере: dш / Dш 9/20; |
tш / Dш 6/10; где dш – внутренний диаметр |
|||||||||||
шнека; Dш – наружный диаметр шнека; |
tш |
– |
шаг винта; v – |
скорость |
||||||||
перемещения груза; nш – частота вращения шнека.
Разность (D2 |
d2 ) 0,8D2 |
, тогда с учетом геометрических |
|
ш |
ш |
ш |
|
соотношений уравнение (6.27) примет вид
Qv 0,377Dш3 nш .
В табл. 6.1 приведены рекомендуемые диаметры шнека Dш в зависимости от объемной производительности Qv .
Таблица 6.1
Диаметры шнека в зависимости от производительности
Qv , |
4,5 |
|
6,3 |
9 |
12,5 |
18 |
|
|
25 |
|
|
35,5 |
|
50 |
|
71 |
|
|
100 |
|
140 |
|
|
200 |
280 |
400 |
|
|||
м3/ч |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dш |
160 |
|
180 |
200 |
220 |
250 |
|
280 |
|
320 |
|
360 |
|
400 |
|
|
450 |
|
500 |
|
560 |
630 |
710 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Частота вращения винта |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
n |
ш |
|
Q /0,377D3 , |
|
|
|
|
|
|
|
|
(6.28) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
ш |
|
|
|
|
|
|
|
|
|
|
||||
где |
Q |
– в м3/ч; |
D |
ш |
– в м. |
Чтобы получить |
n |
ш |
– |
в об/мин, |
нужно |
|||||||||||||||||||
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
производительность Qv |
разделить на 60, т.е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
n |
ш |
Q /22,6D3 . |
|
|
|
|
|
|
|
|
(6.29) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
ш |
|
|
|
|
|
|
|
|
|
|
|||||
Для выбранного примера объемная производительность
Qv Qm / 35/1,4 25 м3/ч.
Частота вращения шнека при Dш 280 мм = 0,28 м
nш 25/22,6 0,283 50 об/мин.
Шаг винта найдем из соотношения tш /Dш 0,6.
tш 0,6 Dш 0,6 280 168 мм.
Округляем полученное значение до числа из ряда Ra 40: 90 – 95 – 100 –
105 |
– 110 – 120 – 125 – 130 – 140 – 150 – 160 – 170 – 180 – 190 – 200 – 210 – |
|
220 |
– 240 – 250 – 260 – 280 – 300 – 320 – 340 – 360 – 380 – 400 – 420 – 450 – |
|
480 |
– 500. |
|
|
Выбираем tш 170 мм. Скорость транспортирования определяют по |
|
формуле |
|
|
|
v tш nш . |
(6.30) |
Если подставить числовые значения, то получим
v 170 50 8500 мм/мин = 8,5 м/мин.
Средний диаметр найдем по формуле
Dср (Dш dш)/2 (280 126)/2 203 мм,
где dш 0,45Dш 0,45 280 126 мм.
Угол подъема винтовой линии определяется через тангенс, который равен отношению шага шнека к длине средней окружности, т.е.
tg tш / Dср 0,6Dш / 0,725Dш 0,263.
Тогда угол подъема 14,80. Объем груза, находящегося в конвейере,
V (D2 |
d2 ) l |
ш |
/4. |
(6.31) |
ш |
ш |
|
|
После подстановки числовых значений получим
V (0,282 0,1262 ) 15/4 0,736 м3.
Масса |
груза |
т V 0,736 1,4 1,03 |
т. |
Вес |
груза |
G m g 1,03 9,81 10 кН.
Винт, вращаясь, двигает груз в цилиндрическом желобе (трубе 1). Для перемещения груза винт прикладывает к нему силу Ft, равную силе трения груза о желоб, т.е.
Ft = f · G. |
(6.32) |
Подставляя числовые значения, получим величину тяговой силы для выбранного примера
Ft = 0,4 · 10 = 4 kH.
Коэффициенты трения материалов по стали можно выбирать в табл.6.2
При вращении винт, как домкрат, должен преодолевать силу тяги Ft, которая приложена на средней окружности винта диаметром Dср. Угол подъема на средней окружности винта λ = 14,8º. Окружная сила на среднем радиусе
P = Ft · tg (λ + φ), |
(6.33) |
где φ = arctg f – угол трения. Если f = 0,4, то φ = arctg 0,4 = 21,80 … Под-
ставляя числовые значения в формулу (6.33), получим
P = 4 · tg (14,80 + 21,80) = 2,97 ≈ 3 кН.
|
Коэффициенты трения материалов по стали |
Таблица 6.2 |
|||||
|
|
||||||
|
|
|
|
|
|
|
|
Материал |
Глина |
Известняк |
Камень |
|
Песок |
|
Земля |
|
|
формовочная |
|||||
|
|
|
|
|
|
|
|
Сухой |
0,28 |
0,32 |
0,26 |
|
0,32 |
|
0,3 |
|
|
|
|
|
|
|
|
Влажный |
0,35 |
0,38 |
0,32 |
|
0,6 |
|
0,4 |
|
|
|
|
|
|
|
|
|
|
Момент на валу шнека |
|
|
|
||
|
|
Мш = P · Dcp / 2. |
|
|
(6.34) |
||
Подставляя числовые значения, получим |
|
|
|
||||
Мш = 3 · 0,2 / 2 = 0,3 кН·м
6.4. Рекомендации по выполнению кинематических схем, общего вида редуктора и пояснительной записки
Схема – это графический конструкторский документ, на котором показаны в виде условных изображений или обозначений составные части машины и связи между ними.
Элемент схемы – это ее составная часть, которая выполняет определенную функцию и не может быть разделена на части (вал, зубчатое колесо, шкив, муфта и т.п.).
Устройство – это совокупность элементов, представляющая единую конструкцию.
Различают следующие три вида схем.
Структурная схема, определяющая основные составные части объекта, их назначение и взаимосвязь. Она предназначена для общего ознакомления с машиной (изделием).
Функциональная схема разъясняет процессы, происходящие в отдельных частях (цепях) машины и в целом.
Принципиальная (полная) схема определяет полный состав элементов и связей между ними и дает детальное представление о принципах работы машины, устройства или изделия.
Кинематическая схема – это схема подвижных частей машины. Наименование схемы определяется ее видом и типом. Например,
схема электрическая принципиальная, схема кинематическая принципиальная схема гидравлическая принципиальная и т.д. Каждая схема должна быть оформлена как самостоятельный документ.
|
Таблица 6.3 |
Условные обозначения для вычерчивания кинематических схем |
|
|
|
Наименование |
Условные обозначение |
1 |
2 |
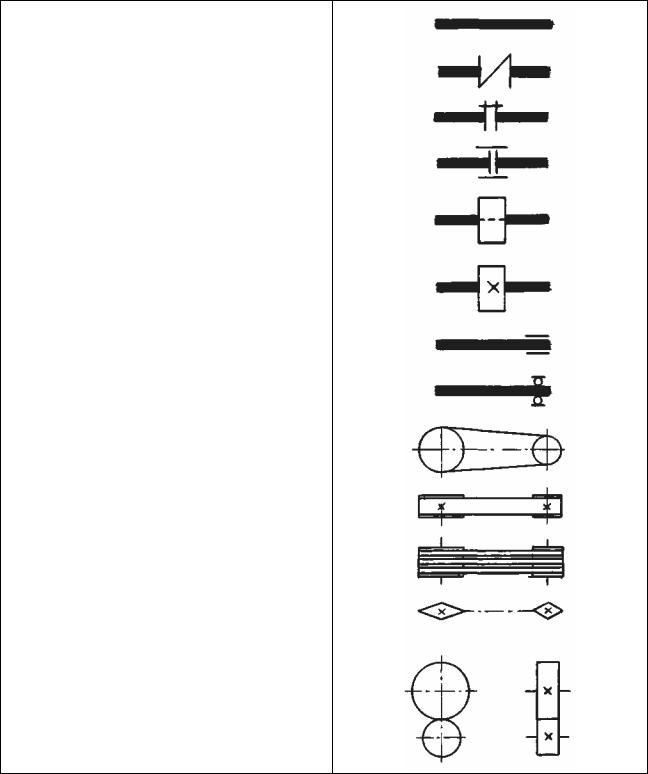
1.Вал
2.Муфта упругая
3.Муфта глухая
4.Муфта зубчатая
5.Соединение детали с валом свободное при вращении
6.Соединение детали с валом глухое
7.Подшипник скольжения
8.Подшипник качения
9.Передача:
а) плоским ремнем
б) клиновым ремнем
в) цепью
10.Передача цилиндрическими зубчатыми колесами
Окончание табл. 6.3
1 |
2 |
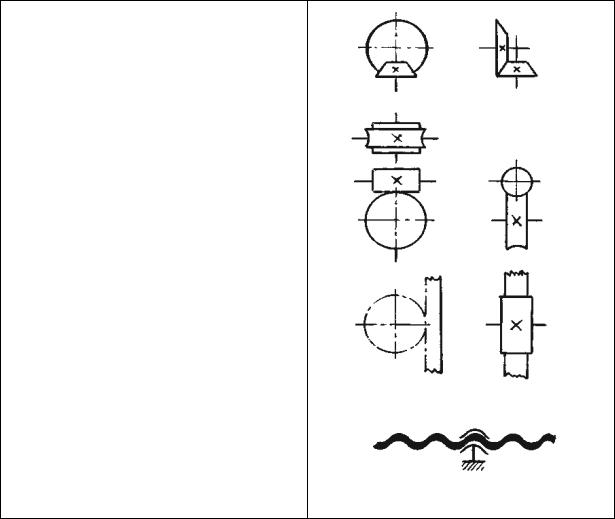
11.Передача коническими зубчатыми колесами
12.Червячная передача
13. Реечная передача
14. Винтовая передача
Вид схемы: Г – гидравлическая, П – пневматическая, К – кинематическая, Э – электрическая и др.
Тип схем: 1 – структурная, 2 – функциональная, 3 – принципиальная (полная), 4 – соединений (монтажная) и др.
Пример обозначения шифра: К3 – схема кинематическая принципиальная.
В штампе в конце номера чертежа проставляют или шифр универсальный: Сх – схема, или шифр конкретный: Г2, К3, Э4 и т.п.
Кинематическая схема машины представляет собой условное изображение взаимосвязи отдельных ее элементов и механизмов, участвующих в передаче движения рабочему органу. Для вычерчивания кинематической схемы используют условные обозначения, основные из которых приведены в табл. 6.3. Кинематическую схему вычерчивают в произвольном масштабе. Примеры кинематических схем изображены на рис. 2.1 и в заданиях
1…10.