

1.3.Автотранспортные системы перевозок грузов
1.3.1.Применение системного подхода
вописании транспортного процесса
Врамках данной дисциплины принято понятие, что системный подход – это направление методологии специального научного познания и социальной практики, в основе которого лежит исследование объектов как систем, которые представляются как множество взаимосвязанных элементов. Данное понятие согласуется с положениями общей теории систем, основная задача которой состоит в том, чтобы, опираясь на понимание системы как взаимосвязанного комплекса элементов, найти законы, объясняющие поведение различных сложных систем.
Сложность рассматриваемой проблемы обуславливается тем, что теория грузовых автомобильных перевозок неИможет быть описана какимто одним математическим выражением, ибо отраслевая транспортная система автомобильных перевозок грузовДсостоит из множества подсистем различного вида и назначения, где, согласно складывающимся эксплуатационным условиям и производственнымАситуациям, проявляются своеобразные зависимости. В связи с этим и решалась первостепенная задача – отработать классификациюбавтотранспортных систем, чтобы осуществить подход к выработке математических формулировок, позволяющих с достаточной степенью точностииото разить реальный транспортный процесс. Отсюда и определилось, что в первую очередь исследованиям необходимо
подвергнуть те подс стемы (хотя они могут в определенных условиях рассматриватьсяСкак самостоятельные системы), где непосредственно осуществляется перевозка грузов, формируются доходы и затраты на выполнение транспортного процесса. Таким образом, полагается, что, идя от простого к сложному, т.е. поднимаясь от одного иерархического уровня к более высокому, можно выработать язык описания и отображения зависимостей транспортного процесса. При этом естественно стремление получить простые модели и алгоритмы, поскольку практикой уже установлено, что по мере усложнения алгоритма и детализации связей затраты возрастают, а положительный эффект от этого отсутствует или увеличивается незначительно.
Простые модели (алгоритмы), если они позволяют создать надежные вычислительные системы, более предпочтительны, чем сложные, и они могут быть легко поняты и освоены практикой в короткие сроки. В то же время математический аппарат должен дать возможность получать достоверные ответы на вопросы, что будет происходить в системе при изменении параметров А, В или С.
22
1.3.2. Транспортный процесс как система с дискретным состоянием
В практической деятельности на каждый автомобиль выдается задание, где указывается объект работы, т.е. маршрут и количество ездок Ze, которое необходимо выполнить в течение смены (суток). В теоретической и учебной литературе расчет сменной (т; т км) или суточной выработки (т; т км) производится по известным зависимостям, имеющих начало из фор-
мул (1.12) и (1.13):
|
|
Tн VТ q |
|
|
||||
|
WQ |
|
|
, т/ч; |
(1.14) |
|||
|
lге |
tпв VТ |
|
|||||
WP |
Tн lге |
VТ q |
И |
(1.15) |
||||
|
|
|
|
|
, т км /ч, |
|||
|
|
lге tпв VТ |
Д |
|
||||
где Тн – время пребывания в наряде, ч. |
|
|||||||
|
|
|
|
|||||
При этом указывается, и это следует из представленных зависимо-
стей, что транспортная продукцияА, измеряемая количеством перевезенного груза и количеством выполненных тонно-километров, вырабатывается единовременно. Такое одновременное описание процесса перевозки груза указывает, что с течением времени, согласно формулам (1.14) и (1.15), будет возрастать количество продукции по линейной зависимости (рис. 1.11 и 1.12). При анализе был спользован метод цепных подстановок.
ся перевозка грузов на маятниковых маршрутах с обратным негруженым пробегом (см. рис. 1.1).
Рассмотрим, соответствует ли непрерывное изменение, описываемое |
||
|
|
б |
формулами (1.14) и (1.15), действительному протеканию транспортного |
||
процесса на примере. |
и |
|
|
||
Наиболее распространенным вариантом работы автомобилей являет- |
||
С |
|
|
В соответствии с представленной схемой выработка тоннокилометров происходит в течение времени, когда автомобиль движется с грузом из пункта погрузки в пункт разгрузки, но, как только он встанет под разгрузку, выработка тонно-километров прекращается и вновь возобновляется после очередного выхода автомобиля из пункта погрузки. Количество же перевезенного груза может быть измерено только в пункте назначения после разгрузки, а в процессе движения сколько груза бы не находилось в автомобиле, нет результата, и утверждать об единовременно получаемой продукции бессмысленно.
23
Q
Т
Рис. 1.11. Изменение Q во времени
Р
|
Т |
Рис. 1.12. Изменение Р во времени |
|
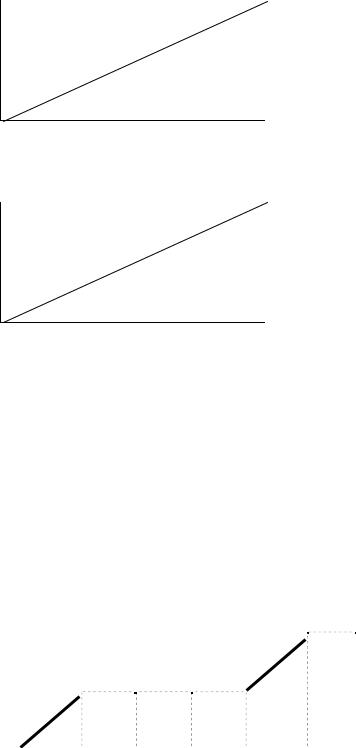
Графически изменение количества продукции во времени представ- |
|
лено на рис. 1.13 и 1.14. |
И |
|
|
В момент времени t1 автомобиль встал под первую погрузку, которая |
|
заканчивается в момент времени t2, тогдаДже начинается движение с гру- |
|
зом. Прибытие в пункт назначения определяется моментом времени t3 (это
же начало разгрузки). Груз считается перевезенным, когда окончена раз- |
|||||
|
|
|
А |
|
|
грузка (момент времени t4), кол чество перевезенного груза показано ор- |
|||||
динатой точки а (см. р с. 1.13)б. |
|
|
|||
Q |
|
и |
|
б |
|
|
|
||||
|
|
С |
а |
|
|
|
|
|
|
|
|
t1 |
t2 |
t3 |
t4 |
t5 |
t6 |
t7 |
t8 |
Т |
Рис. 1.13. Фактическое изменение количества перевезенного груза во времени
24
Р
б
а
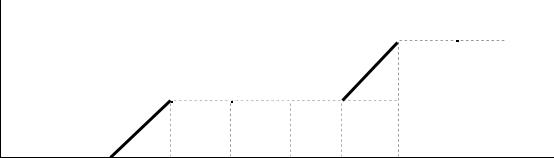
t1 t2 t3 t4 t5 t6 t7 t8 Т
Рис. 1.14. Фактическая выработка тонно-километров во времени
Затем автомобиль направляется под следующую погрузку, исполняя холостой пробег, и прибывает в пункт погрузки в момент времени t5. Далее операции транспортного процесса повторяются, момент времени t8 соответствует выполнению очередной разгрузкиИи ездки. Теперь в пункте назначения будет количество груза, равное сумме объемов грузов, перевезенных за две ездки, что и определяется ординатой точки б.
Если рассмотреть процесс выработкиДтранспортной продукции – тонно-километров (см. рис. 1.14), то с момента времени t1 до момента t2 эта продукция не вырабатываетсяА. Она производится с момента времени t2 до момента t3, пока автомобиль вместе с грузом находится в движении, после чего выработка тонноб-километров прекращается. Вновь выработка тонно-километров происходит только после выхода из пункта погрузки, и за время движения с грузомиее величина растет пропорционально пробегу с грузом и фактической загрузке автомобиля.
Как следуетСиз р с. 1.13 1.14, фазы времени получения выработки в тоннах и тонно-километрах не совпадают и не имеют непрерывного характера, а соответствуют разрывным линейным зависимостям.
На других маршрутах, где одновременно работают несколько транспортных средств и выполняется одновременно несколько ездок, особенно на радиальных, картина изменения количества перевозимого груза и получения транспортной продукции значительно сложнее. Но для каждого автомобиля в отдельности транспортный процесс происходит аналогично вышеописанному, а в целом для системы представляет собой сумму всех единичных процессов.
На других типах маршрутов при выполнении каждой ездки проявляются аналогичные закономерности в получении транспортной продукции. Поэтому независимо от типа маршрута транспортный процесс в общем виде можно представить как функционирование системы, которая состоит из погрузочных пунктов, транспортных средств и разгрузочных пунктов. Такая система с течением времени меняет свое состояние, после-
25

довательно переходя из состояния S0, когда не выполнено ни одной ездки, в состояние Sn, когда отдельно взятые автомобили или в целом автотранспортное предприятие (АТП) выполнили n-е число ездок.
Переход системы из одного состояния в другое происходит «скачком», а так как каждую ездку можно перечислить (пронумеровать), то, согласно положениям теории «Исследования операций», транспортный процесс является процессом с дискретным состоянием.
Размеченный граф состояний транспортного процесса как системы применительно к каждой единице подвижного состава может быть представлен в следующем виде (рис. 1.15).
S0 |
|
S1 |
|
S2 |
... |
Si |
... |
Sn |
|
|
|
|
|
|
|
|
|
|
|
И |
|
Рис. 1.15. Граф состояний транспортного процесса |
|
|
|
Д |
Согласно построенному графу, транспортный процесс из состояния |
||
S0 односторонне переходит в следующие состояния: |
||
- S1 – выполнена одна ездка; |
|
|
… |
|
|
- Si – выполнено i ездок; |
|
|
… |
|
|
- Sn |
– выполнено n ездок. |
|
|
и |
|
Но ежесменно (ежесуточно)Атакая система приходит в первоначаль- |
||
ное состояние S0. Этот переход может осуществляться с любого состояния |
||
|
С |
|
Si. При этом если i-е ч слобездок равно плановому, то сменно-суточный план выполнен, в прот вном случае – нет.
Представление о непрерывности транспортного процесса не соответствует реальной работе, выполняемой на маршрутах, поэтому использование разработанной на этой основе теории протекания транспортного процесса зачастую приводит к ошибочным решениям и результатам, что подтверждается исследованиями, проведенными в условиях Западной Сибири. Выведенные ранее зависимости (1.14) и (1.15) для описания и анализа работы подвижного состава при выполнении перевозок массовых и мелкопартионных грузов не могут быть успешно применены. Для правильной оценки влияния изменения эксплуатационных факторов и расчета результатов работы применяемый математический аппарат должен учитывать дискретность (целочисленность) транспортного процесса.
26