

2.3. Функціонально-ієрархічна структура дсп
Відмінними рисами сучасних структур побудови АСК промисловими підприємствами є: проникнення обчислювальних засобів і впровадження мережних технологій на всі рівні керування рис. 2.2.
Рис. 2.2. Ієрархія ДСП.
У світовій практиці фахівці з комплексної автоматизації виробництва також виділяють п'ять рівнів керування сучасним підприємством (рис.2.3), що повністю збігається з вище наведеною ієрархічною структурою ДСП.
Рис. 2.3. Піраміда керування сучасним виробництвом.
На рівні ЕRP – Enterprise Resource Planning (планування ресурсів підприємства) здійснюються розрахунки й аналіз фінансово-економічних показників, вирішуються стратегічні адміністративні й логістичні завдання.
На рівні MES – Manufacturing Execution Systems (системи виконання виробництвом) – завдання керування якістю продукції, планування й контролю послідовності операцій технологічного процесу, керування виробничими й людськими ресурсами в рамках технологічного процесу, технічного обслуговування виробничого встаткування.
Ці два рівні ставляться до завдань АСКП (автоматизованим системам керування підприємством) і технічні засоби, за допомогою яких ці завдання реалізуються – це офісні персональні комп'ютери (ПК) і робочі станції на їхній основі в службах головних фахівців підприємства.
На наступних трьох рівнях вирішуються завдання, які ставляться до класу АСК ТП (автоматизованих систем керування технологічними процесами).
SCADA – Supervisory Control and Data Acquisition (система збору даних і супервізорного (диспетчерського) керування) – це рівень тактичного оперативного керування, на якому вирішуються завдання оптимізації, діагностики, адаптації й т.п.
Control-level – рівень безпосереднього (локального) керування, який реалізується на таких ТЗА як: ПО – панелі (пульти) операторів, ПЛК – програмувальні логічні контролери, ПЗО – пристрою зв'язку з об'єктом.
HMI – Human-Machine Interface (людино-машинний зв'язок) – здійснює візуалізацію (відображення інформації) ходу технологічного процесу.
Input/Output – Входи/Виходи об'єкта керування являють собою датчики й виконавчі механізми (Д/ЇМ) конкретних технологічних установок і робочих машин.
2.3. Конструктивно-технологічна структура дсп
Конструктивна структура ДСП є розгалуженою та базується засадах стандартизації та уніфікації (рис. 2.4).
Рис. 2.4. Структура ДСП.
УКТС (уніфікований комплекс технічних засобів) – це сукупність різних типів технічних виробів, призначених для виконання різних функцій, але побудованих на основі одного принципу дії, що й мають однакові конструктивні елементи.
АКТС (агрегатний комплекс технічних засобів) – це сукупність різних типів технічних виробів і приладів, взаємозалежних між собою по функціональному призначенню, конструктивному виконанні, виді живлення, рівню вхідних/вихідних сигналів, створювана на єдиній конструктивній і програмно-технічній базі по блочно-модульному принципу. Приклади відомих вітчизняних УКТС і АКТС (табл. 2.1).
ПТК (програмно-технічний комплекс) – це сукупність мікропроцесорних засобів автоматизації (програмувальні логічні контролери, локальні регулятори, пристрої зв'язку з об'єктом), дисплейних панелей операторів і серверів, промислових мереж, що зв'язують між собою перераховані компоненти, а також промислового програмного забезпечення всіх цих складових частин, призначена для створення розподілених АСК ТП у різних галузях промисловості. Приклади сучасних вітчизняних і закордонних ПТК.
Конкретні комплекси технічних засобів складаються із сотень і тисяч різних типів, типорозмірів, модифікацій і виконань приладів і пристроїв.
Тип виробу – це сукупність технічних виробів, однакових по функціональному призначенню, єдиного принципу дії, що мають однакову номенклатуру головного параметра.
Типорозмір – вироби того самого типу, але конкретні значення, що мають свої, головного параметра.
Модифікація – це сукупність виробів одного типу, що мають певні конструктивні особливості.
Виконання – конструктивні особливості, що впливають на експлуатаційні характеристики.
Таблиця 2.1. Комплекси ТЗА
Найменування |
Состав устаткування |
Область застосування |
Агрегатні засоби контролю й регулювання (АСКР) |
Перетворювачі; пристрою програмної обробки сигналів; засобу відображення інформації |
Централізований контроль і регулювання безперервними й дискретними ТП |
Агрегатний комплекс аналогових електричних засобів регулювання на мікроелементній базі (АКЭСР) |
Пристрою введення/виводу; регулятори; задатчики; функціональні блоки; безконтактні НИМ |
Локальні АСК, АСК безперервними ТП |
Агрегатний комплекс щитових електричних засобів регулювання (КАСКАД-2) |
Аналогові й позиційні регулятори; допоміжні пристрої |
Локальні АСК; системи централізованого контролю й регулювання |
Комплекс ТС для локальних информационно- керованих систем (КТСЛИУС-2) |
Пристрою перетворення сигналів; уведення/вивід інформації в процесор; ОЗУ й зовнішня пам'ять; контролери |
Локальні АСК в складі АСК ТП для безперервних і дискретних ТП |
Мікропроцесорні засоби диспетчеризації автоматики й телемеханіки (Мікродат) |
Пристрою збору, первинної обробки, відображення й зберігання даних; цифрове, програмно-логічне керування |
Розподілені безперервні й дискретні АСК ТП |
Агрегатний комплекс щитових пневматичних засобів регулювання (СТАРТ) |
Регулятори;, що показують прилади, що й реєструють; функціональні блоки |
Пожароопасные
технологічні
процеси |
Агрегатний функціонально-технічний комплекс пневматичних засобів (ЦЕНТР) |
Пристрою контролю; Пі-регулятори; дистанційне керування ЇМ; пульти операторів |
|
Агрегатний комплекс засобів збору й первинної обробки дискретної інформації (АСПИ) |
Пристрою реєстрації, первинної обробки, збору й передачі інформації |
АСК ТП і АСКП для збору й формування дискретної первинної інформації |
Агрегатний комплекс засобів електровимірювальної техніки (АСЭТ) |
Пристрою збору й перетворення інформації; комутатори; ЦАП і АЦП |
Наукові дослідження, випробування; діагностика |
Агрегатний комплекс засобів обчислювальної техніки ( АСВТ-М) |
Пристрою безперервного керування й переробки, зберігання інформації, уведення/виводу на носії |
АСК ТП і АСКП, пов'язані з обробкою великої кількості інформації |
Агрегатний комплекс електричних виконавчих механізмів (АКЭИМ) |
Виконавчі механізми, побудовані з уніфікованих блоків і модулів |
АСК ТП у всіх галузях промисловості |
Система стандартів визначає ті вимоги до приладів і засобам автоматизації, які забезпечують їхня сумісність в АСК ТП по певним основним ознакам (рис. 2.5).
Рис. 2.5. Стандарти ДСП
Обмін інформацією між технічними засобами ДСП реалізується за допомогою сигналів зв'язки й інтерфейсів.
В АСК найпоширеніші електричні сигнали зв'язку, гідностями яких є висока швидкість передачі сигналу, низька вартість і доступність джерел енергії, простота прокладки ліній зв'язку. Пневматичні сигнали застосовують в основному в нафтовій, хімічній і нафтохімічній промисловості, де необхідно забезпечити вибухобезпечність і не потрібне висока швидкодія. Гідравлічні сигнали в основному застосовують у гідравлічних системах, що стежать, і пристроях керування гідравлічними виконавчими механізмами.
Інформаційні сигнали можуть бути представлені в природному або уніфікованому виді. Природнім сигналом називається сигнал первинного вимірювального перетворювача, вид і діапазон зміни якого визначаються його фізичними властивостями й діапазоном зміни вимірюваної величини. Звичайно це вихідні сигнали вимірювальних перетворювачів, найчастіше електричні, які можна передати на невелику відстань ( до декількох метрів). Вид носія інформації й діапазон зміни уніфікованого сигналу не залежать від вимірюваної величини й методу виміру. Звичайно уніфікований сигнал одержують із природного за допомогою вбудованих або зовнішніх перетворювачів, що нормують.
Для прикладу розглянемо більш докладно інформаційну сумісність ТЗА по рівнях вхідних/вихідних уніфікованих сигналів, тобто сигналів дистанційної передачі інформації з уніфікованими параметрами, що забезпечують інформаційне сполучення (інтерфейс) між різними приладами, блоками й системами АСК ТП (рис.2.5, табл. 2.2).
Таблиця 2.2. Уніфіковані сигнали
Електричні сигнали |
Пневматичні сигнали |
|||||
Аналогові |
Дискретні |
Аналогові |
Дискретні |
|||
= I [мА] |
= U [мВ] |
~ U [В] |
~γ [кГц] |
= U [В] |
[кПа] |
|
0 – 5; -5 – +5; 4 – 20 |
0 – 10; -10 – +10; 0 – 1000 |
0 – 2; -1 – +1 |
0 – 8; 2 – 4; 0 – 100 |
для TTL: «0» ≤ +0,4 «1» ≥ +2,4 |
для УСЭППА: |
|
20 – 100 |
«0» ≤ 10 «1» ≥ 110 |
|||||
Енергетична сумісність ТЗА визначається стандартними рівнями живлення, використовуваними в сучасних загальнопромислових установках і технологічних машинах. У пневмоавтоматиці це наступні значення тиску стисненого повітря: Pпит 400 кПа – високий рівень; Pпит=150 кПа – середній, Pпит<10 кПа – низький рівень. В електроавтоматиці це наступні значення робочих напруг: для високовольтної апаратури Up 1000 B; для низьковольтної апаратури Up<1000 B, яке у свою чергу має кращі стандартні найпоширеніші значення:
- для силових ланцюгів ~ U: 220, 380, 440, 660 B, = U: 110, 220, 440 B;
- для ланцюгів керування ~ U: 24, 36, 110, 127 B, = U: 5, 6, 12, 24, 48 B.
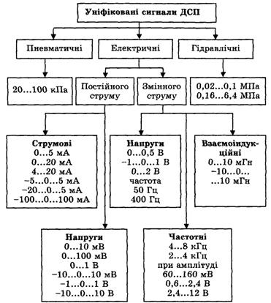
Рис. 2.5. Класифікація уніфікованих інформаційних сигналів ДСП.
При створенні складних систем, особливо на базі мікропроцесорних пристроїв і обчислювальних засобів, обмін інформацією між технічними засобами верхнього рівня здійснюється за допомогою інтерфейсів. Інтерфейс - це сукупність програмних і апаратних засобів, що встановлюють пристроїв, що й реалізують взаємодію, що входять у систему, і призначених для збору, переробки й використання інформації.
Інтерфейс складається із програмної й апаратної частин. Програмна (інформаційна) частина визначає протокол (порядок) обміну сигналами й інформацією (алгоритми й тимчасові діаграми). Апаратна частина (інтерфейсні карти, плати) - здійснює інформаційний обмін керуючими, адресними й іншими сигналами між функціональними модулями.