

8.5.2. Безконтактні магнітні реле
На базі магнітних підсилювачів створені безконтактні магнітні реле (БМР). Для створення БМР магнітний підсилювач (МП) переводиться в релейний режим. Для цієї мети в МП вводиться обмотка зворотної связиwо.с. Схема МП з обмоткою зворотного зв'язку, у якому струм Iо.с пропорційний напрузі на навантаженні Uн, наведена на рис.26. Результуюча МРС керування складається з МРС обмотки керування Iуwу й МРС обмотки зворотного зв'язку Iо.сwо.с. Принцип дії БМР пояснимо за допомогою характеристик, наведених на рис. 8.30.
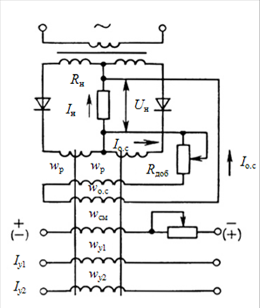
Рис. 8.30. Схема безконтактного магнітного реле на МП з зворотним зв’язком по напрузі.
На рис.8.31, а крива I являє собою характеристику керування магнітного підсилювача без зворотного зв'язку; пряма II – залежність напруги на навантаженні Uн від струму зворотного зв'язку, наведеного до обмотки керування,
![]() ,
,
де Rз.з – опір обмотки зворотному зв'язка; Rдоб – додатковий опір для регулювання коефіцієнта зворотному зв'язка kз.з.
Пряма II проведена так, що tga = Iз.з /Uн.
При Iу=0 результуюча МРС створюється тільки струмом зворотного зв'язку Iз.з. Напруга на навантаженні Uн0 визначається крапкою перетинання 0 прямій II з характеристикою I. При струмі керування Iу1 результуюча МРС підсумується з МРС обмоток керування й МРС обмотки зворотного зв'язку:
![]() ,
,
де
![]() – результуючий струм керування.
– результуючий струм керування.
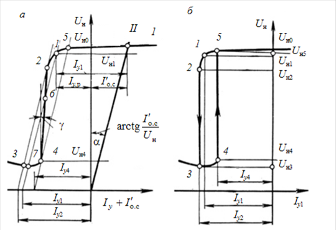
Рис. 8.31. Релейна характеристика безконтактного магнітного реле.
Напруга на навантаженні Uн1 визначається крапкою перетинання 1 прямій II з характеристикою I. Струму Iу1 відповідають також точки 6 і 7. Однак точку 6 є крапкою хиткої рівноваги, з якої режим роботи підсилювача переходить у точку 1, а в точку 7 режим роботи підсилювача переходить тільки по галузі 3,7 і 4.
При струмі Iу2 стан визначається крапками 2 і 3. При незначному зростанні струму Iу по модулю (Iу<0) відбуваються стрибкоподібні переходи режиму роботи із крапки 2 у крапку 3 і напруги на навантаженні з Uн2 до Uн3. При подальшому збільшенні по модулю струму Iу (Iу<0) напруга на навантаженні змінюється незначно (галузі характеристики 1 уліво від точки 3).
При зменшенні по модулю струму Iу (рух вправо по осі Iу + Iз.з) і досягненні значення Iу = Iу4 відбувається стрибкоподібний перехід режиму роботи із крапки 4 у крапку 5. Напруга на навантаженні при цьому різко міняється з Uн4 до Uн5.
Таким чином, описаний режим роботи магнітного підсилювача відповідає релейному режиму: при відсутності струму Iу напруга на навантаженні максимально Uн0; при русі по характеристиці I уліво ( тобто при збільшенні по модулю струму Iу) і досягненні струмом Iу значення Iу2 відбувається стрибкоподібне зменшення напруги на навантаженні з Uн2 до Uн3, при подальшому русі по характеристиці I уліво напруга на навантаженні міняється незначно; при русі по характеристиці I вправо (при зменшенні по модулю струму Iу) і досягненні струмом керування значення Iу4 відбувається стрибкоподібне зростання напруги на навантаженні Uн4 до Uн5. Описаний режим роботи магнітного підсилювача зображений результуючою характеристикою (рис. 8.31, б). Розглянутий режим магнітного підсилювача аналогічний режиму роботи реле з розмикальними контактами: при Iу0=0 напруга на навантаженні максимально («контакти» замкнені), при Iу = Iу2 напруга Uн різке зменшується («контакти» розмикаються). У реальних магнітних підсилювачах Uн2/Uн3³ 100, а значення Uн3 дуже мале.
Для одержання релейного режиму магнітного підсилювача необхідно, щоб дотримувалася нерівність a < g (рис. 8.31, а).
При введенні в магнітний підсилювач додаткової обмотки зсуву можна одержувати характеристики « вхід-вихід» безконтактних магнітних реле, наведені на рис. 8.32. При негативному зсуві Iс1wс2/wу безконтактне реле має замикаючий контакт (рис. 8.32, а); при відсутності зсуву – розмикальний контакт (рис. 8.31, б).
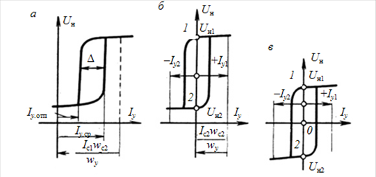
Рис. 8.32. Характеристика вхід/вихід безконтактного магнітного реле.
При зменшенні негативного зсуву [(Iс2wс2/wу) << (Iс1wс2 / wу)] реле має характеристику із двома стійкими станами (рис.8.32, б). Якщо спочатку реле перебувало в режимі, що відповідає точці 1, і поданий позитивний сигнал +Iу1, то після зняття сигналу напруга на навантаженні залишиться рівним Uн1. При подачі негативного сигналу Iу2 напруга стрибком знизиться до значення Uн2. Після зняття сигналу Iу2 напруга залишиться рівним Uн2. Таким чином, при роботі (рис.8.32, б) безконтактне реле функціонує аналогічно поляризованому реле.
На основі реверсивних магнітних підсилювачів одержують реле зі зміною знака напруги на навантаженні (рис.8.32, в).
Істотна перевага безконтактних магнітних реле – відсутність комутуючих контактів, які часто виходять із ладу; недолік – їх інерційність. Робота БМР залежить від напруги живлення, частоти, температури навколишнього середовища.