

8.5. Безконтактні релейні елементи
8.5.1. Транзисторні й трансформаторні схеми керування
В апаратах низької напруги, призначених для виконання простих функцій (комутування кіл, фазове регулювання), широке поширення знайшли схеми керування тиристорами, виконані на основі транзисторів і трансформаторів з магнітопроводами, що насичуються. Характерним для цих схем є простота конструкції, висока надійність і низька вартість.
Транзистор, як керований елемент, може бути використаний у якості формувача імпульсів, підсилювача, фазового інвертора, логічного елемента, граничного елемента при перетворенні вихідних сигналів різних датчиків. Мала вхідна потужність, необхідна для схем керування на транзисторах, подається звичайно з індикаторних ланцюгів або з інших ланцюгів з більшим вихідним опором.
Широкими можливостями мають транзисторні схеми відносно формування вихідних сигналів із заданими параметрами імпульсів. Причому схеми, що реалізують ті самі функції, можуть бути виконані на транзисторах різного типу й виду: pnр-типу, nрn-типу, одноперехідних транзисторах, польових оптроних транзисторах і ін. Тому існує велика кількість різноманітних варіантів схем керування й окремих їхніх вузлів, що синхронізують пристроїв.
Проте, більшість із них можна віднести до вже відомих типових схем, таким, як мультивібратор з одним або двома стійкими станами, блокінг-генератор, тригер Шміта й ін.
Мультивібратор з одним стійким станом застосовується для формування прямокутних імпульсів із заданою тривалістю (рис. 8.25). Тривалість імпульсу визначається вибором постійної часу перезарядження конденсатора С. Для запуску схеми можна використовувати короткі синхронізуючі імпульси. Схема сама вертається до вихідного стану.
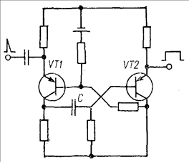
Рис. 8.25. Схема транзисторного формувача прямокутних керуючих імпульсів.
Якщо зробити симетричні перехресні зв'язки між базою й колектором транзисторів VT1 і VT2, то мультивібратор буде мати два стійкі зі стояння: включений транзистор VT1 і виключений VТ2 або виключений VT1 і включений VТ2. Вхідні сигнали полярності, що чергується, при цьому необхідно подавати на базовий вивід транзистора VT1 або VТ2.
Мультивібратори із двома стійкими станами здатні включатися каскадно, як це відбувається в кільцевих лічильниках. При такому режимі роботи забезпечується можливість зрушення вихідних імпульсів на задану величину для керування тиристорами в багатополюсному виконанні.
Аналогічні функції можуть виконувати транзисторні схеми блокінг-генератора й тригера Шмідта. Оскільки тригер Шмідта генерує імпульси з дуже малим часом наростання, він може використовуватися в якості вихідного формувача керуючих імпульсів, при твердих вимогах до крутості їх фронту, наприклад при керуванні паралельно з'єднаними тиристорами.
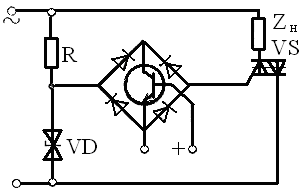
На рис 8.26 наведена проста схема керування апаратом змінного струму, виконаним на базі симістора VS. Джерелом напруги керування в схемі є двосторонній стабілітрон VD. Транзистор VT включений у діагональ випрямного мосту, що дозволяє забезпечувати протікання струму керування через нього при зміні полярності напруги на симісторі. Включення й відключення схеми здійснюються відповідно подачею напруги зсуву на базу транзистора і його зняттям.
Застосування трансформаторів дроселів з, що насичуються магнітопроводами в системах керування апаратами змінного струму обумовлене здатністю цих магнітопроводів різко змінювати індуктивний опір обмоток. Залежно від мети застосування магнітопровід трансформатора може бути виконаний з матеріалу із прямокутною петлею гістерезису або з магнітом’яких матеріалів, у яких коерцитивна сила НС становить десяті частки ампера на сантиметр.
Рис. 8.26. Схема керування симетричним тиристором. |
Рис. 8.27. Схема керування на основі трансформатора з магнітопроводом, що насичується. |
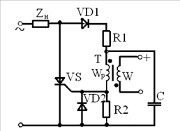
У схемі, показаної на рис. 8.27, трансформатор Т с магнітопроводом з матеріалу із прямокутною петлею гістерезису включений у керуючий ланцюг послідовно з діодом VD1 і резисторами R1 і R2. Якщо магнітопровід трансформатора насичений, індуктивний опір xp його вторинної обмотки ωp мало і їм можна зневажити.
Тому в позитивний півперіод напруги (коли діод vd1 зміщений у прямому напрямку), що прикладається до тиристора й, відповідно до керуючого ланцюга напруга розподіляється між резисторами R1 і R2. При R1>>R2 більша частина напруги падає на резистор R1. Напруга на резисторі R2 у цьому стані недостатньо для того, щоб включити тиристор VS. Якщо в негативний півперіод прикласти сигнал (+) до керуючої обмотки трансформатора, як це показано на рис 8.27, то магнітопровід буде виведений зі стану насичення. На початку наступного позитивного півперіоду протягом часу, поки магнітопровід знову намагнічується до стану насичення, індуктивний опір обмотки залишається більшим і на ньому підтримується напруга, у кілька раз більше, ніж при насиченому магнітопроводі. Конденсатор Із при цьому заряджається під впливом сумарної напруги uc=up+ur1. По досягненню в магнітопроводі трансформатора насиченого стану опір обмотки ωp різко зменшується й конденсатор З починає розряджатися на резистор R2 і вхідний ланцюг тиристора VS, забезпечуючи його включення. Таким чином, трансформатор, по суті, відіграє роль безконтактного комутатора ланцюги управління тиристора VS. Для періодичного включення тиристора VS необхідно в інтервалі кожного негативного півперіоду виводити магнітопровід трансформатора Т з насичення за допомогою керуючого імпульсу напруги, що подавати, наприклад, від синхронізуючого пристрою. Вибір параметрів трансформатора й співвідношення опорів резисторів R1 і R2 проводиться виходячи з того, що необхідне спадання напруги на керуючому електроді повинне забезпечуватися на самому початку півперіоду прикладеного до тиристора VS напруги. Методика такого розрахунків наведена в роботі.
Трансформатори з магнітопроводами, що насичуються, використовуються також у якості синхронізуючих пристроїв у системах керування тиристорними апаратами. Принцип реалізації такого способу синхронізації пояснюється функціональною схемою системи керування тиристорним блоком (рис. 8.28).
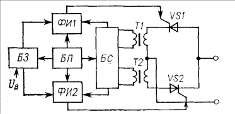
Рис. 8.28. Схема синхронізації на основі пік-трансформаторів.
Трансформатори Т1 і Т2 у ній включені послідовно з тиристорами в кожному із плечей силового блоку. Це значить, що в первинних обмотках трансформаторів протікає постійний пульсуючий струм. Якщо магнітопровід трансформатора виготовлений з магнітом’якого матеріалу, характеристика якого має різко виражену зону насичення, то при синусоїдальному струмі в первинній обмотці магнітний потік міняється по подібній трапеції формі й у вторинній обмотці наводиться ЕРС шпилястої (трикутної) форми. При однонапівперіодном випрямленні струму, що має місце в кожному плечі тиристорного блоку, різнополярні імпульсні ЕРС виникають на початку півперіоду струму й наприкінці його.
Перший позитивний (умовно) імпульс є результатом різкого намагнічування магнітопроводу до насичення. Другий імпульс відповідає виходу магнітопроводу з режиму насичення наприкінці півперіоду струму. Він фіксує закінчення провідності тиристора в галузі й може бути використаний для запуску формувача керуючих імпульсів (ФІ), за допомогою якого здійснюється включення тиристора в зустрічно-паралельній галузях. У блоці синхронізації (БС) імпульс трикутної форми перетвориться в прямокутний або експонентний (рис.8.29), крутий фронт якого відповідає моменту переходу струму в навантаженні через нульове значення.
Первісне включення силового блоку здійснюється блоком запуску (БЗ) при впливі на нього імпульсом напруги UВ зовнішнього джерела. Буквами БП на рис. 6.11 позначений блок живлення.
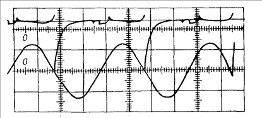
Рис. 8.29. Осциллограмма струму в навантаженні імпульсів синхронізації, ціна одного великого розподілу по струму -200 А; по напрузі -5 В; за часом - 5 мс.
Розглянутий спосіб синхронізації керування тиристорним блоком по струму відрізняється простотою й може використовуватися в апаратах низької й високої напруги.