

8.4. Спеціальні реле
8.4.1. Теплові реле
Вимірювальним органом теплового реле є біметалічний елемент, який при нагріванні звивається й переводить контактну систему у відключене або включений стан. Біметалічний елемент являє собою двошарову пластинку з металів з різними температурними коефіцієнтами лінійного розширення (ТКЛР). При нагріванні шар термоактивного металу суттєво розширюється, у той час як шар термоінертного металу майже не деформується. Якщо один кінець біметалічної пластинки жорстко закріпити, то інший вільний кінець її буде звиватися.
Пластинки біметалічного елемента, міцно з'єднані між собою, повинні мати можливо більшу різницю ТКЛР, що буде збільшувати чутливість теплового реле. Межі пружності компонентів біметалу повинні бути високими. У цьому випадку для них припустима більша температура нагрівання, що не викликає залишкових деформацій.
У якості матеріалу з низьким ТКЛР (термоінертного компонента) часто застосовується сплав нікелю із залізом, називаний інваром. Інвар 36Н містить 36 % нікелю, інвар 39Н - 39 %. У якості термоактивного компонента з високим ТКЛР використовуються різні сталі, латунь, константан і інші матеріали.
На рис. 8.20 зображена конструктивна схема теплового реле. Біметалічна пластина такого реле впирається у верхній кінець пружини 7. Нижній кінець пружини давить на виступ пластмасової колодки 4, яка може повертатися навколо осі О1.
Рис. 8.20. Схема теплового реле: 1 – біметалічна пластина; 2 – кнопка ручного возврату; 3, 8 – упор; 4 – ізоляційна колодка; 5, 6 – рухомий та нерухомий контакт; 7 – пружина. |
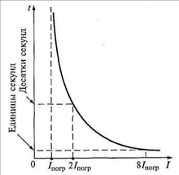
Рис. 8.21. Характеристика теплового реле. |
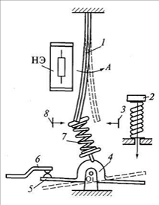
У положенні, зображеному на рис. 8.20, рух пластини 1 і верхнього кінця пружини уліво обмежене упором 8. Сила пружини 7 впливає на виступ пластмасової колодки 4 так, що вона виявляється поверненої за годинниковою стрілкою, а укріплений на ній рухливий контакт 5 - замкненим з нерухливим контактом 6.
При протіканні підвищеного струму по нагрівальному елементу (або безпосередньо по пластині 1) - біметалічна пластина 1 нагрівається і її нижній кінець переміщається в напрямку стрілки А. У результаті верхній кінець пружини 7переходить вправо й створювана нею сила впливає на колодку 4 так, що вона повертається на деякий кут проти годинникової стрілки, а контакти 5 і 6 розмикаються. Упори 3 і 8 обмежують переміщення нижнього кінця пластини 1. Повернення реле у вихідне положення відбувається мимовільно, коли біметалічна пластинка охолоне. В інших конструкціях переклад реле у вихідне положення здійснюється кнопкою ручного повернення 2.
На рис. 8.21 дана типова для теплових реле залежність часу спрацьовування t від струму I. При мінімальному (прикордонному) струмі спрацьовування Iпогр час спрацьовування великий, зі збільшенням струму воно зменшується.
8.4.2. Реле часу
Реле часу створює регульовану витримку часу від моменту подачі сигналу на спрацьовування до моменту замикання (або розмикання) контактів. Програмне реле - це різновид реле часу з декількома контактами, що мають різні регульовані, як правило, незалежні друг від друга витримки часу. Наприклад, існують реле рахунку імпульсів, контакти яких замикаються після відліку заздалегідь заданого числа імпульсів, що подавайтеся на котушку керування. Пристрій таких реле має багато загального із кроковими шукачами.
Для створення витримки часу застосовуються електричний розрядний RC - контур, електромагнітні реле з короткозамкненими гільзами, механічні механізми (анкерний і планетарний), пневматичні й ін.
На рис. 8.22 дана схема реле часу з п’єзокерамічним елементом. П'єзокерамічні матеріали, отримані, наприклад, на основі титанату барію, мають властивість змінювати свої лінійні розміри в електричному полі. П'єзокерамічний біморфний елемент (БЕ) складається із двох міцно склеєних пластинок, на зовнішніх поверхнях яких, а також у місці їх з'єднання розміщені металеві обкладки. Верхній шар елемента в електричному полі подовжується, нижній - коротшає. У результаті цей елемент, консольно-закріплений на одному кінці, звивається, що приводить до замикання контакту К1. При знятті електричного поля з обкладок деформація біморфного елемента зникає, контакт К1 розмикається, а контакт К2 замикається.
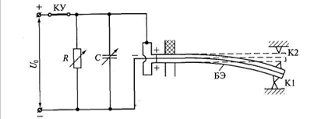
Рис. 8.22. Схема реле часу з п’єзокерамічним елементом.
При замкненій кнопці керування (КК) конденсатор С и обкладки БЭ заряджені до напруги U0 і сам БЕ деформований. При відключенні КК починається розряд конденсатора З на резистор R. Напруга на обкладинках БЕ поступово знижується, і його механічна деформація також поступово зникає.
Реле часу з електромагнітною затримкою (електромагнітне реле часу) засноване на використанні вихрових струмів для затримки спрацьовування електромагнітної системи. На магнітопровід 1 (рис. 8.23) надіта металева (звичайно мідна) гільза (або шайба) 3, рівнозначна короткозамкненої обмотці з одним витком. Коли змінюється основний потік Фо, створений струмом котушки 2, у гільзі 3 наводяться вихрові струми, потік Фвх від яких має напрямок, що перешкоджає зміні основного потоку відповідно до принципу інерції Ленца. Коли потік Фо наростає, потік Фвх має протилежний напрямок, а коли Фо знижується - напрямок Фвх збігається з Фо.
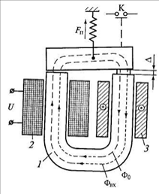
Рис. 8.23. Електромагнітне реле часу: 1 – магнітопровід; 2 – котушка; 3 – мідна гільза.
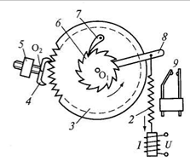
Широко поширені реле часу з механічною затримкою, зокрема з годинним механізмом. У таких реле (рис. 8.24) при подачі напруги на електромагнітний привод 1 розтягується пружина 2 і годинний механізм приходить у дію. Анкер 4, повертаючись навколо осі О2, «перепускає» зубчастий диск 3, який обертається навколо осі О1.Що переміщається разом з ним важіль 8 наприкінці шляху впирається в пластинчастий контакт 9 і замикає його. Храповий механізм дає рухливій системі реле можливість вернутися у вихідне положення, коли буде знята напруга електромагнітного привода 1. Повернення здійснюється спеціальною пружиною (на малюнку не показана). Змінюючи відстань від грузика 5 до осі О2 і масу грузика, можна регулювати момент інерції анкера й через нього - витримку часу реле.
|
Рис. 8.24. Реле часу з анкерним механізмом: 1 – електромагнітний привод; 2 – пружина; 3 – зубцевий диск; 4 – анкер; 5 – груз; 6 – храпове колесо; 7 – блок; 8 – важіль; 9 – контакт. |
Витримка часу, створювана реле з годинним механізмом,
![]()
де α - кут повороту рухливої системи від початку руху до замикання контактів; n - передаточне число зубчастого механізму; z - число зубів ходового колеса; Tа - період коливань анкера,
![]()
тут J - момент інерції анкера; φ - кут повороту анкера при коливаннях; Мдв - момент, створюваний силами, що рухаються; Mпрд - момент, створюваний протидіючими силами.
У деяких реле застосовується пневматичне або гідравлічна затримка. Зміною перетину отвору, через який проникає повітря (або рідина) з одного обсягу в іншій, досягається регулювання витримки часу. Найбільш високі витримки часу ( до кілька годин) досягаються в реле із планетарним механізмами.