

8.3.4. Поляризовані електромагнітні реле
На відміну від розглянутих раніше нейтральних електромагнітних реле, у поляризованого реле напрямок електромагнітного зусилля залежить від полярності сигналу постійного струму в обмотці. Поляризація цих реле здійснюється за допомогою постійного магніту.
Існує багато конструктивних різновидів поляризованих реле, які класифікуються по ряду ознак. За конструктивною схемою магнітного ланцюга розрізняють реле з послідовної, паралельної (диференціальної) і бруківці магнітними ланцюгами, по числу обмоток керування - одно й багатообмоткові, по способу настроювання контактів (числу стійких положень якоря) - дво- і трипозиційні.
Поляризовані реле можуть бути використані також у якості віброперетворювачів, але найбільше поширення вони одержали в малопотужній автоматиці, особливо в системах, що стежать, при керуванні реверсивними двигунами.
До переваг поляризованих реле ставляться: висока чутливість, яка характеризується малою потужністю спрацьовування й становить 10-5 Вт; великий коефіцієнт керування; малий час спрацьовування (мс).
Недоліки в порівнянні з нейтральними електромагнітними реле наступні: трохи складніше конструкція; більші габаритні розміри, вага й вартість.
У поляризовані реле використовують диференціальні й мостові схеми магнітних ланцюгів, які мають багато різновидів (назва ланцюгів визначається типом електричної схеми заміщення електромагнітної системи). На рис.8.18 зображене поляризоване реле з диференціальною схемою магнітного ланцюга.
Рис. 8.17. Поляризоване реле з диференційною схемою магнітного кола: 1, 1’ – котушки намагничення; 2 – ярмо; 3 – постійний магніт; 4 – якір; 5, 5’ – контакти. |
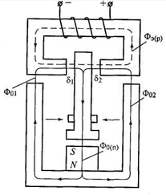
Рис. 8.18. Поляризоване реле з мостовою схемою магнітного кола. |
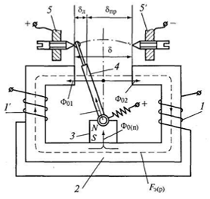
На якір реле діє два незалежні друг від друга потоку: потік Ф0(п), створюваний постійним магнітом 3 і не залежний від робочого стану схеми, у яку включено реле, і робітник (керуючий) потік Фэ(р), створюваний котушками, що намагнічують, 1 і 1’ і залежний від струму, що протікає по їхніх обмотках.
Електромагнітне зусилля, що діє на якір 4, залежить, таким чином, від сумарної дії потоків Фэ(р) і Ф0(п). Зміна напрямку електромагнітного зусилля при зміні полярності струму в робочій обмотці відбувається внаслідок того, що змінюється напрямок робочого потоку відносно потоку поляризацій.
Потік поляризації Ф0(п) проходить по якорю й розгалужується на дві частини - Ф01 і Ф02 відповідно до провідностей повітряних зазорів ліворуч δЛ і праворуч δпр від якоря. Залежно від полярності керуючого сигналу робочий потік Фэ(р) віднімається з потоку Ф01 у зазорі ліворуч від якоря й додається до потоку Ф02 праворуч від якоря ( як показано на рис.8.17), або навпаки. У випадку, показаному на малюнку, якір перекинеться з лівого положення в праве. При вимиканні сигналу якір буде перебувати в тому положенні, яке він займав до вимикання сигналу. Таким чином, результуюче електромагнітне підсилення, котре діє на якір, буде спрямовано до того зазору, де магнітні потоки підсумуються.
У поляризованому реле з мостовою схемою магнітного ланцюга (рис. 8.18) сили притягання якоря, включеного в одну з діагоналей цієї схеми, діють так само, як і в диференціальній схемі, тобто в повітряному зазорі з однієї сторони якоря робочий потік Фэ(р) спрямований згідно з потоком поляризації Ф0(П), а з іншого - зустрічно. Мостові схеми поляризованих реле мають більш високу стабільність параметрів і стійкість до зовнішніх механічних впливів.
Поляризовані реле випускаються трьох видів настроювання. Реле, зображене на рис.8.17, є двопозиційним. Якщо нерухливі контакти 5 і 5' симетрично розташовані щодо нейтральної лінії (якір відрегульований симетрично), то при вимиканні керуючого сигналу якір реле залишається в тому ж положенні, яке він займав при наявності керуючого сигналу. Повторне включення керуючого сигналу колишньої полярності не викличе зміни положення якоря. Якщо змінити полярність керуючого сигналу, то якір перекинеться в інше положення й залишиться в ньому після зняття сигналу. Таке настроювання називається нейтральної або двопозиційної.
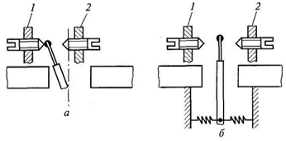
Рис. 8.19. Способи регулювання контактів поляризованого реле: а – двопозиційне з притисненням до одного з контактів; б – трипозиційне; 1, 2 – контакти.
Якщо (рис. 8.19, а) один з контактів 1 або 2 висунуть за нейтральну лінію, то реле є двопозиційним з перевагою до одному з контактів. У цьому випадку при виключеному реле якір завжди притиснуте до лівого контакту 1 ( до правого контакту 2, якщо за нейтральну лінію висунуть лівий контакт) і перекидається вправо лише на час протікання в керуючій обмотці струму відповідної до полярності.
Трипозиційне реле має симетрично розташовані від нейтральної лінії нерухливі контакти (рис. 8.19, б). Якір при відсутності керуючого сигналу втримується в середньому положенні за допомогою спеціальних пружин, розташованих із двох сторін, або закріплюється на плоскій пружині, пружність якої створює стійке положення рівноваги в середньому положенні. При подачі сигналу в керуючу обмотку контакт на якорі замикається з лівим або правим контактом ( залежно від полярності сигналу) і вертається в нейтральне положення після зняття сигналу.
Поляризовані реле знаходять широке застосування в схемах автоматики завдяки своїм характерним рисам. Наявність декількох обмоток дозволяє використовувати їх як логічні елементи, невелика потужність спрацьовування - у якості елементів контролю невеликих електричних сигналів, малий час спрацьовування й чутливість до полярності вхідних сигналів - у якості амплітудних модуляторів і демодуляторів. Завдяки високій чутливості поляризовані реле часто використовують у малопотужних ланцюгах змінного струму із включенням через випрямляч.