

8.3.1. Основні параметри й характеристики електромагнітних реле
У процесі функціонування реле у часовому масштабі розрізняють чотири фази: період (час) спрацьовування tср, робочий період tраб, період (час) відключення tоткл, період (час) спокою tп (рис. 8.13).
Період спрацьовування включає проміжок часу від моменту початку впливу вхідного сигналу на сприймаючий орган до моменту появи сигналу в керованому ланцюзі. Цьому періоду на рис.16, б відповідає відрізок осі абсцис tср = t2 –t0. У момент t0 струм в обмотці реле зростає до значення, при якому електромагнітній силі Fэ, що діє на якір, починає протидіяти сила пружини Fм (механічна сила) проміжного органа. Вхідна величина при цьому називається величиною рушання при спрацьовуванні.
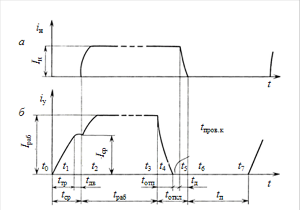
Рис. 8.13. Залежність вихідної (а) та вхідної (б) величини від часу.
Періоду рушання відповідає відрізок tтр = t1–t0. У момент часу t1 якір електромагніту реле починає рух. Протягом tдв = t2–t1 якір переміщається, долаючи протидію проміжного органа Б (рис. 8.12) і приводячи в дію виконавчий орган У. Наприкінці ходу якорі замикаються контакти виконавчого органа, струм навантаження iн (рис. 8.13, а) починає зростати від нуля до значення, що встановилося. Вхідна величина, при якій починається керування вихідним ланцюгом, називається величиною спрацьовування (Iср). Потужність Рср, що відповідає Iср, називається потужністю спрацьовування.
Час спрацьовування
t порівн = tтр + tдв.
Час спрацьовування електромагнітних реле коливається від 1-2 до 20 мс. Електромагнітні реле часу забезпечують витримку до 10 с.
Для оцінки часу спрацьовування реле припустимо використовувати вираження
t порівн = t1kз-bm –a,
де t1 – час спрацьовування при заданому коефіцієнті запасу kз і коефіцієнті m = 1; a, b – коефіцієнти, які визначаються залежно від типу реле й значень kз і m.
Для швидкодіючих реле при kз = 1,5…2 значення коефіцієнта а наближається до одиниці. Для звичайних реле при k з = 1,5…3 значення а = 0,25…0,95, значення коефіцієнта b перебуває звичайно в межах 1,4-1,6.
Робочий період включає проміжок часу
tраб = t3 – t2,
тобто час від моменту керування вихідним ланцюгом t2 до моменту припинення впливу на сприймаючий орган вхідного сигналу t3. Струм починає рости до значення, що встановилося, Iраб (рис. 8.13, б) – це робоче значення вхідної величини, яке забезпечує надійне спрацьовування реле. Відношення Iраб / Icр = kз називається коефіцієнтом запасу по спрацьовуванню.
Для характеристики перевантажувальної здатності чутливого елемента реле застосовується значення вхідної величини, називане граничним значенням робочої величини Iраб.max. Граничне значення робочої величини – це таке її значення, яке чутливий орган витримує протягом короткого нормованого проміжку часу. Однак значення даної величини неприпустимо при роботі реле в нормальному режимі за умовою електричної або механічної міцності або нагрівання.
Для характеристики навантажувальної здатності виконавчого органа реле використовується поняття потужності керування Ру. Потужністю керування називається потужність у керованому ланцюзі, який виконавчий орган може довгостроково пропускати.
Період відключення містить проміжок часу tоткл = t6-t3, тобто час від моменту припинення впливу на сприймаючий орган t3 до моменту зменшення струму iн у керованому ланцюзі до нуля (рис. 8.13, а). У період відключення входить період відпускання tотп = t4-t3, у який реле відключається. Струм iy в обмотці реле спадає до нуля (рис.8.13, б). У цей період протидіюче зусилля пружини (механічне зусилля) перевищує електромагнітне зусилля, тобто Fм > Fэ, і відбувається відпускання якоря. Після вибору провалу контактів (проміжок tк = t5-t4) контакти реле розмикаються й між ними загоряється дуга, яка гасне через час tд = t6-t5. За період tд струм у керованому ланцюзі зменшується від Iн до нуля (рис. 8.13, а).
Час відключення реле
t откл = tотп + tк + tд.
Період відключення характеризується коефіцієнтом повернення, що представляють відношення струму відпускання Iотп до струму спрацьовування Iср:
kв = Iотп / Icр.
Звичайно для реле захисту енергосистем і реле керування, що контролюють вхідний параметр у вузьких межах, kв повинен бути ближче до одиниці.
Період спокою – це проміжок часу
tп = t7 – t6.
Для періоду спокою характерний параметр, називаний величиною неспрацьовування, яка представляє найбільше значення вхідної величини, що забезпечує відсутність як спрацьовування реле, так і втримання в робочому стані. Час неспрацьовування менше часу рушання при спрацьовуванні й часу відпускання.
Відношення потужності керування до потужності спрацьовування називається коефіцієнтом підсилення
kу = Py / Pcр.
Число включень в одиницю часу визначається величиною, обернено пропорційної часу циклу:
![]() .
.