

7.4.6. Індукторні крокові двигуни
Прагнення поєднати переваги активного КД (великий питомий синхронізуючий момент на одиниці об'єму, наявність фіксуючого моменту) і реактивного КД (мала величина кроку) привело до створення гібридних індукторних КД.
У цей час є велику кількість різних конструкцій індукторних двигунів, що різняться числом фаз, розміщенням обмоток, способом фіксації ротора при знеструмленому статорі і т.д. У всіх конструкціях індукторних КД обертаючий момент створюється за рахунок взаємодії магнітного поля, створюваного обмотками статора й постійного магніту в зубчастій структурі повітряного зазору. При цьому синхронізуючий момент індукторного КД по природі є реактивним і створюється силою, що намагнічує, обмоток статора, а постійний магніт, розташований або на статорі, або на роторі, створює фіксуючий момент, що втримує ротор двигуна в заданому положенні при відсутності струму в обмотках статора.
У порівнянні із кроковим двигуном реактивного типу в індукторного КД при однаковій величині кроку більше синхронізуючий момент, кращі енергетичні й динамічні характеристики
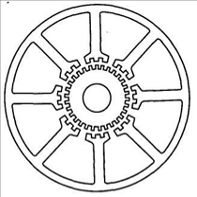
КД індукторного типу мають наступні відмітні ознаки. Пакети їх статорів і роторів виготовляються з аркушів магнітом’ягкої електротехнічної сталі. Пази ротора відкриті. Ротор пасивний. Статор має два види пазів: більші напівзакриті, у яких розміщається обмотка, і малі відкриті, виконувані на зубцях, утворених більшими пазами (рис. 7.35). Сукупність відкритих пазів статора, розташованих на одному великому зубці, називається гребінчастою зоною. Число пазів статора й ротора і їх геометричні розміри вибираються такими, щоб забезпечити необхідний крок і достатній синхронізуючий момент при заданому виді комутації струмів.
Рис. 7.35. Листи сталі статора і ротора КД індукторного типу. |
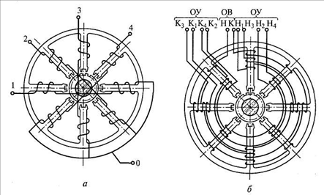
Рис. 7.36. Схеми чотирифазних індукторних КД з самозбудженням (а) та незадежним збудженням (б). |
Основною особливістю індукторних двигунів є те, що магнітний потік у їхньому повітряному зазорі при роботі двигуна містить постійну й змінну складові. Постійна складова потоку збуджується або постійної складової струму обмоток керування - у двигунів із самозбудженням, або спеціальною обмоткою збудження - у двигунів з незалежним порушенням, або постійними магнітами - у магнітоелектричних двигунів.
Змінна складова магнітного поля, що обертається в просторі відповідно до частоти тактів комутації, створюється імпульсами струму обмоток керування, що надходять від електронного комутатора.
На рис.7.36, а представлена схема чотирьохфазного індукторного КД із самозбудженням. Тут постійна складова магнітного потоку в повітряному зазорі створюється безпосередньо однополярними імпульсами керування за допомогою шунтувальних обмотки керування зустрічних діодів. КД із самозбудженням прості по пристрою, не вимагають складного комутатора. Завдяки ряду позитивних якостей вони набули широкого застосування. Недоліком індукторних двигунів із самозбудженням є відсутність внутрішньої магнітної фіксації ротора при забезпечених обмотках статора.
На рис.7.36, б зображена схема чотирьохфазного індукторного КД з незалежним електромагнітним порушенням. Постійний потік порушення тут створюється спеціальною обмоткою (ОВ), що харчується постійним струмом, який мине комутатор. Цей двигун на відміну від попереднього має внутрішню магнітну фіксацію роторів при відсутності струмів в обмотках керування (ОУ). Буквами Н и К позначені початки й кінці обмоток ОВ і ОУ. Позитивною якістю такого двигуна є також те, що струм порушення, минаючи комутатор керування, дозволяє тим самим зменшити його встановлену потужність.