

1.6. Динамічний режим роботи елементів
Динамічним режимом називається процес переходу елементів і систем з одного стану, що встановився, в інше, тобто така умова їх роботи, коли вхідна величина х, а отже, і вихідна величина в змінюються в часі. Процес зміни величин x і в починається з деякого граничного часу t = tn і може протікати в інерційному й безінерційному режимах. При відсутності інерційності процес зміни x і в може характеризуватися графіком, наведеним на рис.1.10, а.
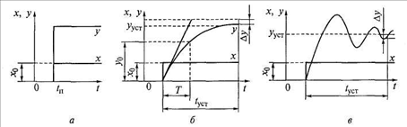
Рис. 1.10. Перехідні процеси в елементах при стрибкоподібній зміні вхідної величини: а – при відсутності інерції; б, в – при наявності інерції.
При наявності інерційності спостерігається запізнювання зміни y стосовно зміни x. Тоді при стрибкоподібній зміні вхідної величини від 0 до x0 (рис.2.3, б) вихідна величина в досягає, що встановився ууст не відразу, а після закінчення проміжку часу, протягом якого відбувається перехідний процес. При цьому перехідний процес може бути аперіодичним (неколивальним) загасаючим (див. рис.2.3, б) або коливальним загасаючим (рис.2.3, в).
Час tуст (час установлення), протягом якого вихідна величина в досягає значення, що встановилося, залежить від інерційності елемента, який характеризується постійною часу Т. У найпростішому випадку встановлення величини у відбувається за показовим законом:
![]()
де Т - постійна часу елемента, що залежить від параметрів, пов'язаних з його інерційністю.
Установлення вихідної величини в тем триваліше, чим більше значення Т. Час установлення tуст вибирається залежно від необхідної точності виміру датчика й становить звичайно (3...5) Т, що дає помилку в динамічному режимі не більш 5...1 %. Ступінь наближення Δу (див. рис.2.3, б, в) звичайно оговорюється й у більшості випадків становить від 1 до 10 % від значення, що встановилося. Різниця між значеннями вихідної величини в динамічному й статичному режимах називається динамічною погрішністю. Бажане, щоб вона була якнайменше. В електромеханічних і електромашинних елементах інерційність в основному визначається механічною інерцією, що рухаються й обертових частин. В електричних елементах інерційність визначається електромагнітною інерцією або іншими подібними факторами. Інерційність може бути причиною порушення стійкої роботи елемента або системи в цілому.
Лекція 2. Державна система приладів
На ранніх етапах створення засобів автоматики в різних організаціях і на підприємствах розроблялася безліч різних приладів виміру й контролю з подібними технічними характеристиками, однак при цьому не враховувалася можливість спільної роботи приладів різних виробників. Це приводило до збільшення вартості розробок складних систем і гальмувало широке впровадження засобів автоматизації. Тому в 1960 р. було ухвалене рішення про створення ДСП, а з 1961 р. почалися роботи з її реалізації.
ДСП являє собою складну систему, що розбудовується, полягає з ряду підсистем, які можна розглядати й класифікувати з різних позицій.
У цей час ДСП являє собою експлуатаційно, інформаційно, енергетично, метрологічно й конструктивно організовану сукупність виробів, призначених для використання як засобів автоматичних і автоматизованих систем контролю, виміру, регулювання технологічних процесів, а також інформаційно-вимірювальних систем. ДСП стала технічною базою для створення автоматичних систем керування технологічними процесами (АСК ТП) і виробництвом (АСКП) у промисловості. Її розвиток і застосування сприяли формалізації процесу проектування АСК ТП і перехід до машинного проектування.