

Лекція 5. Підсилювачі
5.1. Класифікація й характеристики підсилювачів
Вихідні сигнали датчиків і інших елементів у багатьох випадках виявляються слабкими й недостатніми для приведення в дію наступних елементів систем автоматичного керування, наприклад реле, не говорячи вже про такі виконавчі пристрої, як електродвигуни й тягові електромагніти. Тому виникає необхідність посилення сигналів керування, виміру й контролю за допомогою підсилювачів.
Підсилювач – пристрій, призначене для збільшення потужності сигналу за рахунок енергії N додаткового джерела живлення; при цьому вихідна (посилена) величина у є функцією вхідного сигналу х і має однакову з ним фізичну природу. Підсилювачі ставляться до активних елементів автоматики (рис.5.1, б).
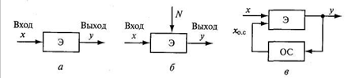
Рис. 5.1. Функціональні схеми елементів АСК: а - пасивний елемент; б – активний елемент (підсилювач); в – елемент зі зворотним зв’язком.
Залежно від виду енергії, одержуваної від додаткового джерела живлення, розрізняють електричні, пневматичні, гідравлічні, механічні й інші підсилювачі.
Найбільш широке застосування знаходять електричні підсилювачі, тому що вони мають високу чутливість, допускають порівняно просте регулювання коефіцієнта підсилення, добре сполучаються з електричними виконавчими пристроями (двигунами, електромагнітами й т.п.).
За принципом дії електричні підсилювачі діляться на дві групи. Першу досить більшу групу становлять підсилювачі, в основу яких покладений підсилювальний елемент (електронна лампа, транзистор, керована індуктивність, керована ємність). У таких підсилювачах малопотужний вхідний сигнал управляє передачею набагато більшої енергії від джерела живлення в корисне навантаження, приєднану до виходу підсилювача. Відповідно до типу керуючого (підсилювального) елемента розрізняють лампові, транзисторні, магнітні, діелектричні підсилювачі. Лампові й транзисторні підсилювачі часто поєднують назвою електронні підсилювачі, тому що принцип їх дії заснована на електронних процесах у вакуумі й напівпровіднику.
Електронні підсилювачі можна розділити по наступних ознаках:
виду активного елемента - лампові, транзисторні, на тунельних діодах, параметричних діодах;
діапазону частот - електрометричні, постійного токи, низької частоти, радіо- і проміжних частот, НВЧ;
ширині смуги частот - вузькосмугові, широкосмугові;
виду сигналу - гармонійні, імпульсні;
електричному параметру - напруга, струм, потужність;
типу навантаження - резисторні, резонансні.
На рис.5.2 показані діапазони частот різних типів підсилювачів. Другу групу становлять підсилювачі, у яких відбувається перетворення енергії живлення, відмінної від виду енергії вихідного й керуючого сигналів. Найбільш типовим для цієї групи є електромашинний підсилювач, у якому механічна енергія привода перетвориться в електричну енергію.
По характеру посилюваних електричних сигналів: безперервних сигналів різних величин і форм; підсилювачі, призначені для посилення імпульсних періодичних і неперіодичних сигналів.
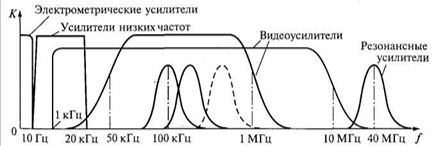
Рис. 5.2. Диапазон частот різних типів підсилювачів
По частоті посилюваних сигналів: підсилювачі змінного струму, що підсилюють сигнали в смузі частот від нижньої робочої частоти fн > 0 до верхньої робочої частоти fв, але не посилюючі їхню постійну складову; підсилювачі постійного струму, що підсилюють у смузі частот від нуля (fh = 0) до fв як змінні складові сигналу, так і його постійну складову.
Керуючий (підсилювальний) елемент разом з резисторами, конденсаторами й іншими деталями схеми прийнято називати підсилювальним каскадом. При недостатньому посиленні сигналу одним каскадом використовується з'єднання декількох каскадів, що виконують роль попереднього посилення, що й забезпечують роботу потужного вихідного каскаду. Виходячи із цього розрізняють однокаскадні й багатокаскадні підсилювачі. Каскади нумеруються в зростаючому порядку від входу до виходу підсилювача, при цьому перший каскад від входу називається вхідним, а останній - вихідним.
Основними характеристиками й параметрами підсилювачів систем автоматичного керування є характеристика керування, динамічні характеристики, коефіцієнт підсилення потужності, вхідний і вихідний опору, коефіцієнт корисної дії ( для вихідних каскадів), рівень власних шумів.
Характеристики керування підсилювачів (рис. 5.3) найчастіше нелінійні й можуть бути, зокрема, із зонами нечутливості й насичення; із зонами нечутливості, насичення й неоднозначністю; релейного типу. У релейному режимі може працювати будь-який підсилювач, при цьому часто використовується релейний режим роботи електронних і магнітних підсилювачів.
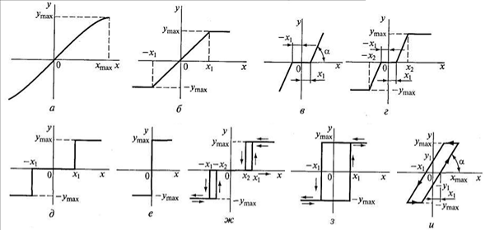
Рис. 5.3. Характеристики керування елементів: а – неперервно лінійна; б – з обмеженою зоною лінійності; в – з зоною нечутливості; г – з зоною нечутливості і насиченням; д – релейна з зоною нечутливості; е – ідеальна релейна; ж – з зоною нечутливості та неоднозначності; з – з неоднозначністю; и – з петлею гістерезису.
Одним з важливих параметрів підсилювача є коефіцієнт посилення потужності, який в, що встановилися режимі визначається співвідношенням
![]()
де Рвих, Рвх - потужності вихідного й вхідного сигналів.
Однак у ряді випадків практичне значення має не посилення потужності сигналу, а збільшення його рівня по напрузі або струмі. У зв'язку із цим прийнятий умовний підрозділ на підсилювачі потужності, підсилювачі напруги, підсилювачі струму, хоча принципово всі вони є підсилювачами потужності й у кожного з них Pвих > Pвх.
Для підсилювачів напруги й струму відповідно розрізняють коефіцієнти підсилення по напрузі й струму, які в режимі, що встановився, визначаються співвідношеннями
![]()
де Uвих, Uвх, Iвих, Iвх - відповідно напруги й струми вихідного й вхідного сигналів.
Режим роботи підсилювача визначається співвідношеннями вхідного Rвх і вихідного Rвих опорів і опорів джерел сигналу RГ і навантаження RH. Для підсилювача напруги RГ << Rвх, Rн >> Rвих, тобто він працює в режимі, практично близькому до холостого ходу на виході; вхідний і вихідний його величинами є напруга. Для підсилювача струму RГ >> Rвх, RH << Rвих, тобто він працює в режимі, практично близькому до короткого замикання на виході; вхідний і вихідний величинами тут є струм. Для підсилювача потужності Rвх ≈ RГ, RH ≈ Rвих, тобто він працює в умовах погодженого навантаження, при цьому вихідною величиною є потужність (максимальна в умовах узгодження).
До підсилювача напруги пред'являється додаткова вимога Uвих > Uвх, у той час як у підсилювачах потужності воно може й не виконуватися. Однак підсилювач потужності повинен віддавати в навантаження певну потужність при відповідній амплітуді вхідного сигналу.
Динамічні властивості підсилювачів визначаються їхніми частотними характеристиками. Звичайно підсилювачі заміщаються аперіодичними й коливальними ланками. Безінерційними в пристроях автоматики в ряді випадків можна вважати транзисторні підсилювачі.
У сучасних системах автоматики виражена тенденція до розширення використання напівпровідникових транзисторних підсилювачів, які найбільшою мірою відповідають таким основним вимогам, пропонованим до підсилювачів, як висока надійність, великий термін служби, малогабаритність і постійна готовність до дії.
Перехідною характеристикою називається залежність миттєвого значення вихідної величини від часу при імпульсній зміні вхідної величини (рис.5.3).
Динамічний діапазон визначається відношенням
![]()
Як правило, у всіх підсилювачах прагнуть до створення великого вхідного опору й малого вихідного опору. Це дозволяє не шунтувати вхідний сигнал з боку генератора й зменшувати вплив навантаження на параметри підсилювача.
Режими роботи підсилювача діляться на класи: А, В, АВ, С и Д - класи посилення сигналів.
При роботі підсилювача в режимі А (рис.5.4, а) змінний струм протікає у вихідному ланцюзі протягом усього періоду. Від джерела живлення безупинно, незалежно від рівня вхідного сигналу, споживається та сама потужність, пропорційна току в робочій крапці. ККД підсилювача при цьому низький.
Режим В (рис.5.4, б) характеризується тим, що струм спокою дорівнює нулю. Кут відсічення рівний 180°. Струм протікає протягом півперіоду. Підсилювач має високий ККД. Застосовується в силових пристроях. Має більші нелінійні викривлення.
У режимі АВ (рис.5.4, в) кут відсічення від 180 до 360°. ККД у порівнянні з режимом У вище, а нелінійні викривлення менше.
У режимі З (рис. 5.4, г) кут відсічення менше 180, з'являються більші нелінійні викривлення. Підсилювач застосовується в множниках частоти.
У режимі Д (рис. 5.4, д) підсилювач перетворить гармонійний сигнал в імпульсний.
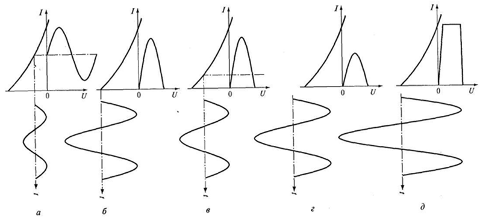
Рис. 5.4. Вхідні та вихідні сигнали підсилювачів при різних режимах роботи: a – режим А; б – режим В; в – режим АВ; г – режим С; д – режим Д.