

4.3.6. Помилка калібрування
Помилка калібрування — це погрішність, допущена виробником при проведенні калібрування датчика на заводі. Ця погрішність носить систематичний характер, і, виходить, додається до всіх реальних передатних функцій. Помилка калібрування зрушує характеристику перетворення датчика в кожній крапці на певну величину. Вона необов'язково повинна бути рівномірної у всьому діапазоні вимірів і може залежати від типу помилки, допущеної в процесі калібрування. Для прикладу розглянемо калібрування у двох крапках реальної передатної функції (рис.4.5). Для визначення нахилу й початкового зрушення функції на датчик подамо послідовно два зовнішні впливи s1 і s2 і зареєструємо два вихідні сигнали A1 і А2 Перший сигнал був обмірюваний абсолютно точно, однак, при визначенні другого допущена погрішність — А, що привело до помилок при визначенні коефіцієнтів а й b. Отримане значення початкового зрушення а1 буде відрізнятися від реального значення а на величину:
![]()
а нахил буде визначений з помилкою: /
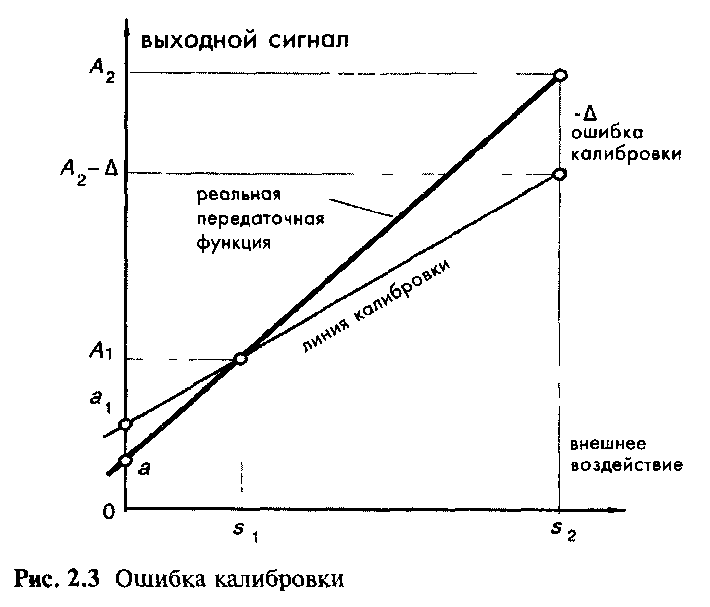 Рис.
4.5. Похибка калібрування.
Рис.
4.5. Похибка калібрування.
4.3.7. Гістерезис
Гістерезис — це різниця значень вихідного сигналу для того самого вхідного сигналу, отриманих при його зростанні й убуванні (рис.4.6). Типовою причиною виникнення гістерезису є тертя й структурні зміни матеріалів.
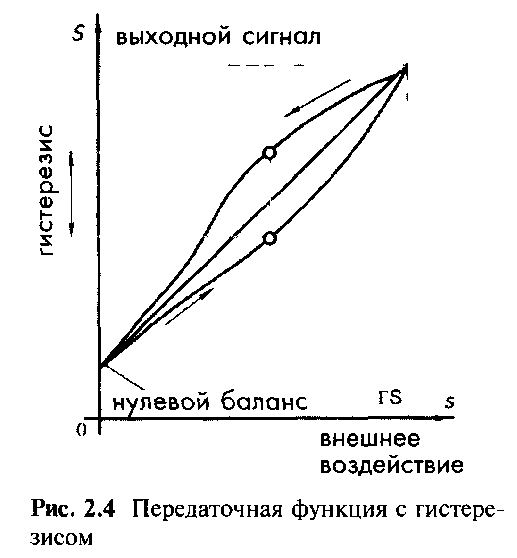
Рис. 4.6. Передатна функція з гістерезисом.
4.3.8. Нелінійність
Нелінійність визначається для датчиків, передатну функцію яких можливо апроксимувати прямою лінією. Під нелінійністю розуміється максимальне відхилення L реальної передатної функції від апроксимуючої прямої лінії. При проведенні декількох циклів калібрування вибирається гірше з отриманих значень нелінійності. Нелінійність звичайно виражається або у відсотках від максимального вхідного сигналу, або в одиницях вимірюваних величин. Перший спосіб проведення апроксимуючої лінії полягає в проведенні прямої через кінцеві крапки передатної функції (рис.4.7А). Для цього спочатку визначаються вихідні значення по найбільшому й найменшому зовнішніх впливах, а потім через ці крапки проводиться пряма лінія (лінія 1). При такій лінеаризації помилка нелінійності мінімальна в кінцевих крапках і максимальна десь у проміжку між ними.
Інший спосіб лінеаризації заснований на застосуванні методу найменших квадратів (лінія 2 на рис.2.7А). Для цього в широкому діапазоні вимірюваних величин для ряду значень (п) зовнішніх впливів s виміряються вихідні сигнали S. Після чого, застосовуючи формулу лінійної регресії, визначають значення коефіцієнтів а й b.
На практиці, у деяких випадках, може знадобитися більша точність лінеаризації у вузькому діапазоні вхідних сигналів. У цьому випадку калібрування проводять у вузькій області, де потрібна підвищена точність, після чого через калібровану крапку із проводиться апроксимуюча лінія (лінія 3 на рис.4.7А).
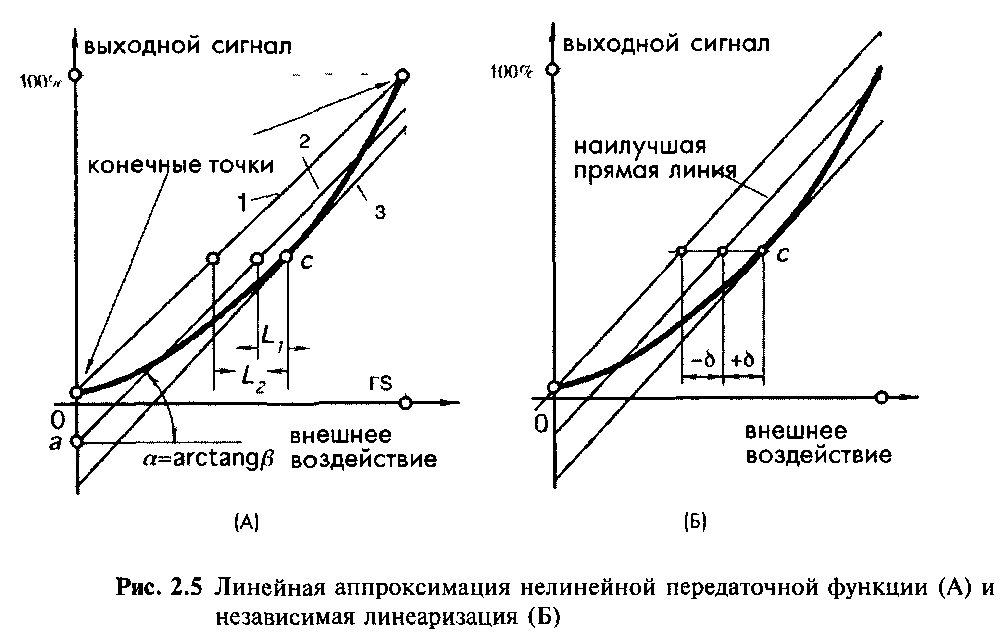
Рис. 4.7 Лінійна апроксимація нелінійної передатної функції (А) та незалежна лінеаризація (Б).
Метод незалежної лінеаризації часто називається «методом найкращої прямій» (рис.4.7Б). Він полягає в знаходженні лінії, що проходить посередині між двома паралельними прямими, розташованими, як можна, ближче друг до друга, що й охоплюють усі вихідні значення реальної передатної функції.
Залежно від методу лінеаризації апроксимуючі лінії будуть мати різні коефіцієнти а й b. Отже, значення нелінійності, отримані різними способами, можуть серйозно різнитися друг від друга.