

4.3. Характеристики датчиків
Може знадобитися кілька етапів перетворень, перш ніж вхідний сигнал, що надходить на датчик, перетвориться у вихідний електричний сигнал.
4.3.1. Передатна функція
Для кожного датчика можна вивести ідеальне або теоретичне співвідношення, що зв'язує сигнали на його вході й виході. Виведене ідеальне співвідношення між вхідним і вихідним сигналом можна виразити у вигляді або таблиці, або графіка, або математичного вираження. Це ідеальне (теоретичне) вираження часте називають передатною функцією. Передатна функція встановлює взаємозв'язок між вихідним електричним сигналом датчика S і зовнішнім впливом s: S =f(s). Ця функція може бути як лінійної, так і нелінійної. У багатьох випадках передатна функція є одномірної
![]()
де а - постійна складова (т е значення вихідного сигналу при нульовому вхідному впливі), b - нахил прямій, який часто називають чутливістю датчика. Параметр S - ця та характеристика електричного сигналу, яку системи збору даних сприймають як вихідного сигналу датчика. Залежно від властивостей датчика це може бути амплітуда, частота або фаза. Також логарифмічною, експонентною, статечною або поліномінальною апроксимацією високого порядку.
Для нелінійних передатних функцій чутливість b не є константою. Для кожного конкретного значення вхідного сигналу s0 її можна визначити у вигляді
![]()
У багатьох випадках нелінійні датчики можуть уважатися лінійними усередині обмеженого діапазону значень. Для більш широкого діапазону значень нелінійна передатна функція представляється у вигляді відрізків декількох прямих ліній - кусково-лінійна апроксимація.
У випадках, коли на вихідний сигнал датчика впливають кілька зовнішніх впливів, його передатна функція стає багатомірною. Прикладом датчика із двовимірною передатною функцією є інфрачервоний датчик температури (рис.4.3). Його передатна функція зв'язує дві температури (Тb — абсолютну температуру об'єкта виміру й Ts — абсолютну температуру поверхні сенсорного елемента) з вихідною напругою V
![]()
де G - константа.
Тобто, що залежність між температурою об'єкта й вихідною напругою (передатна функція) є не тільки нелінійною (параболою четвертого порядку), але вона також залежить від температури поверхні чутливого елемента. Для визначення чутливості такого датчика стосовно температури об'єкта, треба отримати частинну похідну від останнього виразу:

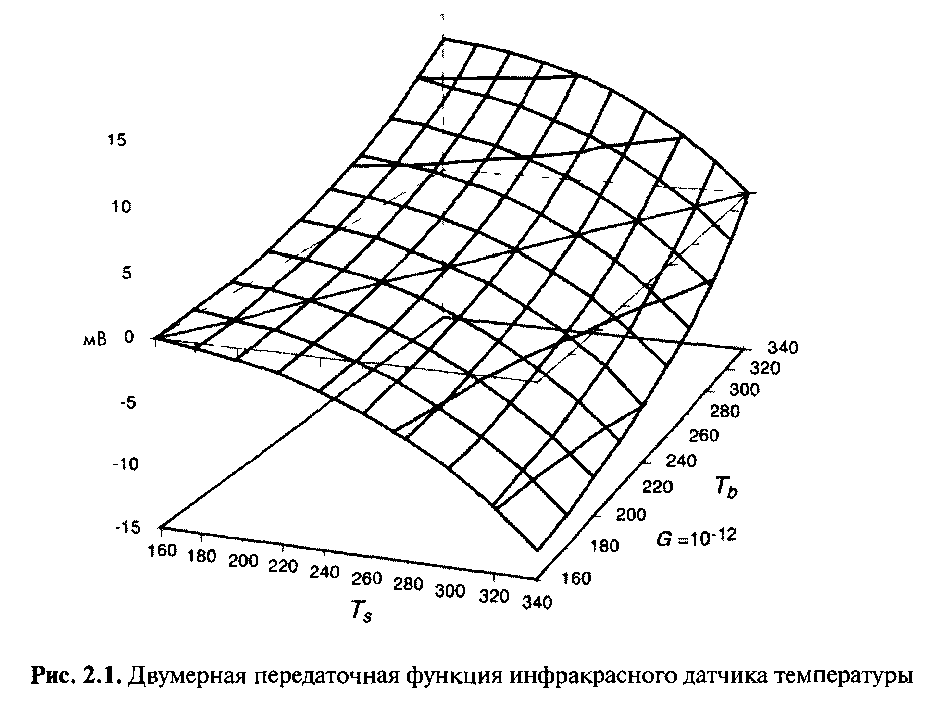
Рис. 4.3 Двомірна передатна функція інфрачервоного датчика температури.
4.3.2. Діапазон вимірюваних значень (максимальний вхідний сигнал)
Динамічний діапазон зовнішніх впливів, який датчик може сприйняти, називається діапазоном вимірюваних значень (FS) - максимально можливе значення вхідного сигналу, яке датчик може перетворити в електричний сигнал, не виходячи за межі припустимих погрішностей. Для датчиків з дуже широкою й нелінійною амплітудно-частотною характеристикою (АЧХ) динамічний діапазон зовнішніх впливів часто виражається в децибелах, які є логарифмічним заходом відносин або потужності, або напруг. Сигнали відображені в логарифмічному виді, мають набагато менші значення, чому вихідні, що на практиці в ряді випадків буває дуже зручно. Оскільки логарифмічна шкала є нелінійної, сигнали низького рівня в ній представляються з більшим дозволом, тоді як сигнали високого рівня перетерплюють більший стиск. Інакше кажучи, логарифмічна шкала для малих сигналів працює як мікроскоп, а у випадку більших сигналів - як телескоп (табл. 4.1)
![]()
Виходячи із цього можна затверджувати, що децибел у двадцять раз перевищує логарифми відносин сили, струму й напруг, тобто:
![]()
Таблиця 4.1. Відношення між потужністю, силою (напруга, струм) та децибелами
Відношення потужності |
1,023 |
1,26 |
10 |
102 |
103 |
104 |
105 |
106 |
107 |
108 |
109 |
1010 |
Відношення сил |
1,012 |
1,12 |
3,16 |
10 |
31,6 |
100 |
316 |
103 |
3162 |
104 |
3104 |
105 |
Децибели |
0 |
1 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |