

Лекція 3. Вимірювальні перетворювачі
3.1. Загальні відомості про перетворювачі
Жодна система керування не може працювати без інформації про стан об'єкта керування і його реакції на керуючі впливи. Елементами систем, що забезпечують одержання такої інформації, є вимірювальні перетворювачі. Фахівці з автоматики також використовують терміни «первинний перетворювач» або «датчик». Надалі термін «первинний перетворювач» будемо використовувати при описі принципу дії того або іншого вимірювального пристрою, а термін «датчик» - при поясненні конструктивного виконання.
Необхідну для керування інформацію про стан об'єкта й зовнішніх впливах одержують у вигляді значень окремих фізичних величин за допомогою відповідних технічних пристроїв, які в автоматиці називають вимірювальними перетворювачами (ВП). На відміну від вимірювальних приладів, де така інформація представлена у вигляді, зручному для безпосереднього сприйняття оператором, інформація від ВП надходить у вигляді певної фізичної величини, зручної для передачі й подальшого перетворення в системі автоматики. Цю величину називають сигналом, і вона однозначно пов'язана з контрольованою фізичною величиною або параметром того або іншого технологічного процесу.
Автоматизація виробничих процесів, наукових експериментів і досліджень вимагає великого обсягу вимірів різних фізичних величин. Про їхнє число можна судити по системі одиниць, яка містить у собі більш 120 фізичних одиниць. У цей час у промисловості існує приблизно наступний розподіл засобів вимірів: температури - 50 %, витрати (об'ємного й масового) - 15 %, тиску - 10 %, рівня - 5 %, кількості (маси, обсягу) - 5 %, часу - 4 %, електричних і магнітних величин - 5 %. Обсяг виконуваних вимірів може бути дуже більшим.
Число типів вимірювальних перетворювачів значно перевершує число вимірюваних величин, тому що ту саму фізичну величину можна вимірювати різними методами й датчиками різних конструкцій.
Для більшості ВП характерний вимір електричними методами не тільки електричних і магнітних, але й інших фізичних величин. При цьому використовується попереднє перетворення неелектричної величини в електричну. Такий підхід обумовлений перевагами електричних вимірів: електричні сигнали просто й швидко передаються на більші відстані; легко, швидко й точно перетворяться в цифровий код; дозволяють забезпечити високу точність і чутливість.
Необхідно відзначити, що не завжди вимірювальний перетворювач виконує безпосередньо функції виміру. У ряді випадків ВП можна використовувати в якості перетворювача однієї фізичної величини в іншу, найчастіше з неелектричної в електричну. Наприклад, при вимірі рівня поплавець у ємності може бути пов'язаний важелем з реостатним перетворювачем, включеним в електричне коло. У цьому випадку зміна рівня, вимірюване переміщенням поплавця, буде перетворюватися в зміну електричного сигналу (напруги, струму).
Для ефективного функціонування ВП повинні відповідати ряду вимог, основними з яких є: висока статична й динамічна точність роботи, що забезпечує формування вихідного сигналу з мінімальними викривленнями; висока вибірковість - датчик повинен реагувати тільки на зміни тієї величини, для якої він призначений; стабільність характеристик у часі; відсутність впливу навантаження у вихідному ланцюзі на режим вхідного ланцюга; висока надійність при роботі в несприятливих умовах зовнішнього середовища; повторюваність характеристик (взаємозамінність); простота й технологічність конструкції; зручність монтажу й обслуговування; низька вартість.
ДСП охоплює лише частина контрольованих величин, які найбільше часто використовують у практиці автоматизації. У ДСП усі контрольовані величини розбиті на п'ять груп:
Теплоенергетичні величини: температура, тиск, перепад тисків, рівень і витрата.
Електроенергетичні величини: постійні й змінні струм і напруга, потужність (активна й реактивна), коефіцієнт потужності, частота й опір ізоляції.
Механічні величини: лінійні й кутові переміщення, кутова швидкість, деформація зусилля моменти, що обертають, число виробів, твердість матеріалів, вібрація, шум і маса.
Хімічний склад: концентрація, состав, хімічні властивості.
Фізичні властивості характеризують наступні величини: вологість, електропровідність, щільність, в'язкість, освітленість і ін.
ВП можуть з'єднуватися, утворюючи наступні структурні схеми: однократного прямого перетворення; послідовного прямого перетворення; диференціальну; зі зворотним зв'язком (компенсаційну).
Найпростіші ВП складаються з одного перетворювача. У випадку послідовного з'єднання декількох первинних перетворювачів вихідна величина попереднього перетворювача є вхідною величиною наступного. Послідовне з'єднання ВП застосовують у тому випадку, коли однократне перетворення не дає зручного для використання вихідного сигналу. При диференціальній схемі усувається вплив на результат перетворення зовнішніх факторів, що спотворюють, завдяки зіставленню (порівнянню) перетвореної й деякої еталонної величин, однаково підданих дії цих факторів. Схема ВП зі зворотним зв'язком характеризується високою точністю, універсальністю й малою залежністю коефіцієнта перетворення від зовнішніх збурювань.
У вітчизняному приладобудуванні питання уніфікації й стандартизації вимірювальних перетворювачів вирішуються в рамках ДСП. Для того щоб створювати складні інформаційні системи (керуючі, вимірювальні), необхідно в першу чергу забезпечити інформаційну сумісність технічних засобів. Із цією метою в рамках ДСП спочатку були уніфіковані, а потім і стандартизовані вихідні сигнали ВП ( ДЕРЖСТАНДАРТ 26.010- 83, 26.011-83, 26.013-83, 26.014-83).
По виду вихідних сигналів розрізняють вимірювальні перетворювачі із природнім і уніфікованим вихідними сигналами. Перші являють собою пристрою, у яких здійснюється первинне (звичайно однократне) перетворення вимірюваної фізичної величини. Природнє формування сигналу тут забезпечується методом перетворення й конструкцією ВП. Такі перетворювачі найчастіше застосовують у пристроях прямого регулювання або при централізованому контролі порівняно простих об'єктів (рис. 2.1).
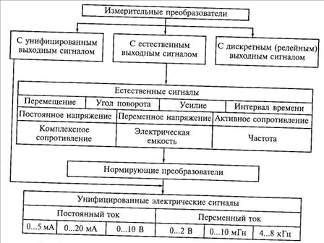 рис.
2.1. Класифікація ВП
рис.
2.1. Класифікація ВП
Природній вихідний сигнал формується первинними ВП природнім шляхом і може являти собою кут повороту, переміщення, зусилля, напруга (постійне й змінне), опір (активне й комплексне), електричну ємність, частоту й ін. ВП із природнім вихідним сигналом (термопари, терморезистори, тензодатчики й ін.) широко застосовують при автоматизації простих об'єктів.
Уніфікований сигнал - сигнал певної фізичної природи, що змінюється в певних фіксованих межах незалежно від виду вимірюваної величини, методу й діапазону її виміру.
При створенні щодо складних систем з використанням ЕОМ і необхідності передачі сигналів на більші відстані застосовують перетворювачі природніх сигналів в уніфіковані. Для цих цілей розробляються спеціальні перетворювачі, що нормують, параметри вихідних сигналів яких наведені на рис.4.2.
Окрему групу становлять перетворювачі з дискретним (релейним) вихідним сигналом, контактна група яких змінює своє положення при досягненні вимірюваною величиною заданого значення. Їх застосовують для позиційного регулювання й сигналізації.