

10.2. Основные этапы проектирования суэп
Модель процесса проектирования СУЭП в виде блок-схемы алгоритма приведена на рисунке 10.1.
В ней выделено 5 рабочих этапов.
На первом этапе уточняется и конкретизируется поставленная задача. Устанавливаются приоритеты к показателям качества с учетом пожеланий заказчика, тенденций технического развития, а также опыта, накопленного при проектировании аналогичных устройств.
При этом выделяются требования:
1. Обязательные: параметры питающей сети; плавность регулирования угловой скорости; конструктивное исполнение и способ защиты; совместимость с другими устройствами и т. п.
2. Минимальные требования, которые можно превысить: КПД, наработка на отказ, уровень электромагнитных помех, точность и диапазон регулирования, габариты и масса и др.
3. Пожелания, которые по возможности следует выполнить (внешнее оформление, комфорт обслуживания и др.).
На втором этапе из всего множества возможных решений задачи выбирают одно или несколько с учетом самых важных требований к системе (аналоговая или дискретная элементная база, жесткая или адаптивная структура управления и т. д.).
На третьем этапе выполняют предварительный расчет параметров преобразователей, средств автоматического управления, оценку экономического эффекта для каждого из вариантов. По результатам выбирается вариант, наиболее полно отвечающий требованиям уточненного технического задания (ТЗ).

Рис. 10.1. Этапы процесса проектирования
На четвертом этапе производится детальная разработка принятого варианта. Производится оптимизация параметров, решаются вопросы конструкторского оформления с учетом технологии изготовления, монтажа, обслуживания, обеспечения максимальной надежности, безопасности эксплуатации, помехозащищенности.
На каждом из этих этапов возможен возврат назад, т. е отдельные этапы могут выполняться многократно (итеративная процедура).
Этап 1. Анализ проблемы и уточнения постановки задачи. Цель этапа – создание исходной базы для проектирования оптимальной СУЭП за счет возможно более точной и полной формулировки предъявляемых к ней требований и пожеланий.
На данном этапе могут привлекаться представители различных специальностей. Поэтому необходимо четкое и понятное всем описание взаимодействия системы привода с рабочей машиной, сетью и вышестоящим уровнем управления.
Для этого помимо словесного используется описание системы с помощью уравнений, диаграмм состояния, функциональных и структурных схем, блок-схем алгоритмов и т. д.
При этом, исходя из требований технологического процесса, устанавливаются:
- метод регулирования скорости: непрерывно, дискретно, или по принципу включить-выключить;
-в каком диапазоне, и с какой точностью должна регулироваться угловая или линейная скорость, а также угловое или линейное перемещение;
- каковы требуемые продолжительности пуска и замедления, допустимые значения ускорения и замедления;
- требования к показателям качества переходных процессов: характер процесса (монотонный, апериодический, колебательный) перерегулирование, время регулирования;
- требования к надежности работы привода, минимально допустимой наработке на отказ;
- необходимость резервного питания и т. д.
При проектировании систем электроприводов дополнительно уточняются и согласовываются следующие или аналогичные им вопросы:
- как должно осуществляться включение приводов - по отдельности или группами, непосредственно с места или с центрального пульта;
- требуется ли аварийное отключение электроприводов и куда должно поступать сообщение об аварийном отключении;
- необходимо ли для индивидуальных или групповых приводов резервное питание и как должно происходить переключение ‑ вручную или автоматически;
- какая информация должна быть выдана обслуживающему персоналу или зарегистрирована, чтобы обеспечить эффективное наблюдение за процессом и быстрое распознавание неисправности в случае аварии;
- какие решения в случае аварии должен принять обслуживающий персонал и какие операции выполнить;
- какими должны быть аварийные сигналы (оптическими, акустическими или комбинированными);
- в каких случаях вмешательство оператора должно быть запротоколировано или зарегистрировано;
- каковы требования техники безопасности, мероприятия по исключению неквалифицированных или случайных действий оператора.
При уточнении требований к СУЭП важно оценить характер внешних возмущающих воздействий, таких как:
- силы, вращающие моменты и моменты инерции рабочей машины;
- напряжение и частота питающей сети;
- интенсивность электростатических и электромагнитных полей, действующих на систему привода;
- климатические факторы: температура окружающей среды, атмосферное давление, влажность воздуха и воздействие воды;
- концентрация химических загрязнений воздуха, вызывающих коррозию.
С учетом этого уточняются следующие вопросы:
- как должна реагировать СУЭП на механические перегрузки;
- какие отклонения напряжения должна допускать система привода;
- какие меры необходимо принять при исчезновении или недопустимом понижении напряжения сети (отключение, переключение на аварийное питание);
- какого должно быть исполнение элементов привода по степени защиты от воздействий окружающей среды;
- меры по защите обслуживающего персонала от поражения электрическим током и т. д.
Этап 2. Выбор принципиальных решений. Исходя из уточненного технического задания, производится выбор вариантов, близких по технико-экономическим показателям к оптимальному как для изготовителя, так и заказчика.
На этом этапе выбираются: виды информационных сигналов, общая структура СУЭП, типы обратных связей.
В СУЭП применяют как аналоговые, так и дискретные сигналы.
В аналоговых системах информационный параметр в пределах определенного диапазона может принимать любое значение. Им может быть уровень сигнала, частоты, фаза или длительность импульсов. Соответственно говорят об амплитудно-импульсной, частотно-импульсной, фазоимпульсной или широтно-импульсной модуляции.
В дискретных сигналах информационный параметр может принимать только конечное число фиксированных значений, например, унитарный двоичный код (число импульсов), цифровой параллельный код (комбинация нулей и единиц определенной длины).
Из дискретных широкое применение находят двоичные сигналы, характерные для релейных элементов (контактных и бесконтактных), логических и ряда других элементов. В них информационный параметр принимает только два фиксированных значения: низкий и высокий (соответственно 0 и 1, или наоборот).
С экономической точки зрения двоичные сигналы предпочтительнее аналоговых, а аналоговые предпочтительнее цифровых, если при этом удовлетворяются технические требования.
При выборе типа сигналов необходимо учитывать возможности их надежной и помехоустойчивой обработки и передачи, а также рационального изготовления, испытания и наладки необходимых функциональных модулей.
При выборе общей структуры СУЭП необходимо учитывать количество управляемых переменных и требуемую точность управления.
При одной управляемой величине, когда не предъявляются жесткие требования к точности управления, или когда управляемая величина мало зависит от возмущающих воздействий, благодаря саморегулированию объекта, предпочтительно применение наиболее простых разомкнутых систем (рис.10.2 а).
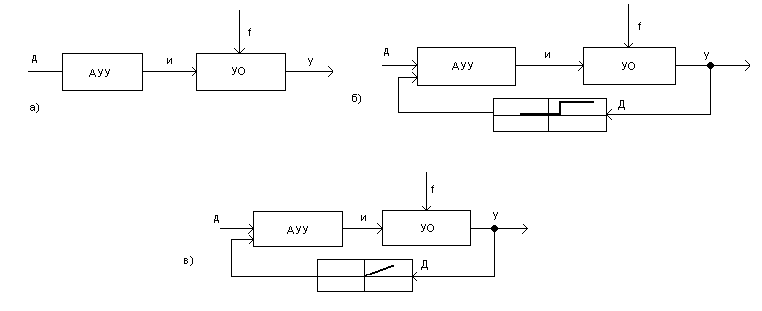
Рис. 10.2 – Основные структуры одноконтурных