

Напряжения питания um uном.
Недостатком СУЭП с регулированием угловой скорости изменением напряжения питания является то, что с уменьшением напряжения снижается магнитный поток, что при постоянном моменте сопротивления МС приводит к возрастанию токов статора и ротора и, как следствие, к повышенному нагреву двигателя.
Поэтому рассматриваемая СУЭП применяется обычно при повторно-кратковременных режимах работы двигателей мощностью до 20…30 кВт с диапазоном регулирования D до 10.
5.3. Система управления асинхронным электродвигателем с импульсным регулированием сопротивления в роторной цепи
Принципиальная схема СУЭП приведена на рис. 5.5.
В цепь ротора электродвигателя М через выпрямительный мост на диодах V1…V6 и сглаживающий дроссель L включён резистор R, периодически с большой частотой шунтируемый тиристорным ключом S.
Управление ключом
осуществляется устройством управления
УУ по сигналу регулятора скорости РС,
на вход которого поступает разность
задающего напряжения
![]() ,
пропорционального заданной скорости
,
пропорционального заданной скорости
![]() и напряжения обратной связи
и напряжения обратной связи
![]() ,
пропорционального фактической скорости
,
пропорционального фактической скорости
![]() ,
от тахогенератора BR.
,
от тахогенератора BR.

Рис. 5.5 Система управления асинхронным электродвигателем
С импульсным регулированием сопротивления в цепи ротора
Для ограничения
максимального момента на вход УУ
дополнительно подается напряжение
![]() ,
пропорциональное выпрямленному току
ротора
,
пропорциональное выпрямленному току
ротора
![]() от датчика тока ДТ.
от датчика тока ДТ.
В результате
обеспечивается работа двигателя на
жестких механических характеристиках
с ограничением максимального момента,
благодаря автоматическому изменению
коэффициента заполнения
![]() ,
где
,
где ![]() ‑ продолжительность замкнутого
состояния ключа S,
‑ продолжительность замкнутого
состояния ключа S,
T – период коммутации.
Примерный вид
механических характеристик привода
при различных значениях задающего
напряжения
![]() показан на рис. 5.6.
показан на рис. 5.6.
Слева рабочая
область ограничена наклонной линией,
представляющей собой механическую
характеристику электродвигателя при
постоянно включенном резисторе R
(![]() ),
а справа – максимальным значением
момента Mmax,
определяемым уровнем сигнала, формируемого
датчиком тока ДТ.
),
а справа – максимальным значением
момента Mmax,
определяемым уровнем сигнала, формируемого
датчиком тока ДТ.
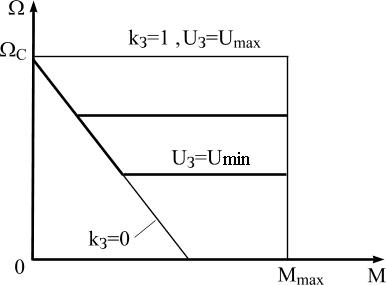
Рис. 5.6. Механические характеристики привода
Рассматриваемая СУЭП достаточно простыми средствами обеспечивает:
Плавное регулирование скорости в широких пределах.
2. Стабилизацию скорости при работе на промежуточных характеристиках.
3. Высокое быстродействие электропривода.
Вместе с тем, коэффициент полезного действия привода невысок и резко снижается при уменьшении скорости из-за высокого сопротивления роторной цепи и влияния высших гармоник тока.
5.4. Суэп с электромагнитной муфтой скольжения
Принципиальная схема СУЭП приведена на рис. 5.7.
Ротор асинхронного
электродвигателя М,
вращающийся с практически постоянной
скоростью
![]() ,
соединен с ведущей полумуфтой
электромагнитной индукционной муфты
(электромагнитной муфты скольжения
ЭМС).
,
соединен с ведущей полумуфтой
электромагнитной индукционной муфты
(электромагнитной муфты скольжения
ЭМС).
Ведомая полумуфта соединена с выходным валом, угловая скорость которого Ω регулируется за счет изменения скольжения в муфте при изменении напряжения, поступающего на обмотку муфты от регулятора скорости РС через щетки и контактные кольца.
На вход регулятора
скорости поступает сигнал ошибки
![]() ,
равный разности задающего напряжения
,
равный разности задающего напряжения
![]() пропорционального заданной скорости
Ω0
(с потенциометра заданной скорости ПЗС)
и напряжения
пропорционального заданной скорости
Ω0
(с потенциометра заданной скорости ПЗС)
и напряжения
![]() ,
пропорционального фактической скорости
Ω (с тахогенератора BR).
,
пропорционального фактической скорости
Ω (с тахогенератора BR).

Рис. 5.7. СУЭП с электромагнитной муфтой скольжения
Благодаря отрицательной обратной связи по скорости система обеспечивает диапазон регулирования D до 40…50 с работой привода на жестких механических характеристиках. При этом жесткость характеристик и диапазон регулирования увеличиваются с ростом коэффициента усиления разомкнутой системы.
Примерный вид механических характеристик привода показан на рис. 5.8.

Рис. 5.8. Примерный вид механических характеристик привода с ЭМС