

И отрицательной обратной связью по скорости
Рабочая область
ограничена механическими характеристиками
разомкнутой системы при номинальном
токе возбуждения ЭМС
![]() (кривая 1) и минимальном
(кривая 1) и минимальном
![]() (кривая 2).
(кривая 2).
Характеристики 3…6 соответствуют различным значениям задающего напряжения в замкнутой системе управления.
Регулирование
угловой скорости привода в рассматриваемой
СУЭП сопровождается потерями энергии
в муфте, практически равными потерям
энергии в роторной цепи асинхронного
электродвигателя при реостатном
регулировании. Коэффициент полезного
действия (КПД) электропривода равен
![]() ,
,
где ![]() ‑ КПД электродвигателя;
‑ КПД электродвигателя;
![]() ‑ скольжение в
муфте.
‑ скольжение в
муфте.
Достоинства СУЭП:
Простота реализации.
Плавность и широкий диапазон регулирования скорости.
Автоматическая стабилизация скорости в рабочей зоне.
Малая мощность устройства управления.
Но из-за значительных потерь энергии в ЭМС, идущих на её нагрев, рассматриваемая СУЭП применяется обычно в приводах сравнительно небольшой мощности (до 20 кВт) при повторно-кратковременных режимах работы.
Пример применения – вынесенные приводы подачи выемочных машин.
5.5. Суэп переменного тока с частотным регулированием скорости
5.5.1. Общие сведения
Прогресс в области силовой преобразовательной техники на базе тиристоров и мощных транзисторов открывает возможности широкого применения частотно-регулируемого асинхронного привода. Частотное регулирование позволяет получить характеристики привода, подобные характеристикам электроприводов постоянного тока, и даже с более высоким быстродействием за счет большой перегрузочной способности асинхронных электродвигателей (АД) и относительно малого момента инерции ротора.
В этих условиях на динамические свойства привода существенное влияние оказывают электромагнитные переходные процессы в системе преобразователь частоты – двигатель, без учета которых невозможно получить адекватную математическую модель привода и обеспечить при синтезе требуемые показатели качества процессов управления.
Учет же этих процессов приводит к тому, что анализ и синтез частотно-регулируемых асинхронных электроприводов оказывается чрезвычайно сложным, и в первую очередь, из-за сложности АД как управляемого объекта. Поэтому рассмотрим вначале математическую модель асинхронного электродвигателя как объекта управления.
5.5.2. Асинхронный электродвигатель как объект регулирования
АД с трехфазными обмотками на статоре и роторе можно описать системой из 7 уравнений. Шесть из них – это уравнения равновесия напряжений на обмотках, записанные по второму закону Кирхгофа:
![]()
или,
![]()
![]() (5.1…5.6)
(5.1…5.6)
где ![]() ‑ активные сопротивления обмоток;
‑ активные сопротивления обмоток;
![]() ‑ потокосцепления с обмотками;
‑ потокосцепления с обмотками;
![]() ‑ собственные
(при j
= k)
и взаимные индуктивности обмоток;
‑ собственные
(при j
= k)
и взаимные индуктивности обмоток;
![]() ‑ угол поворота
ротора;
‑ угол поворота
ротора;
![]() ‑ угловая частота
вращения ротора;
‑ угловая частота
вращения ротора;
![]() ‑ токи в обмотках;
‑ токи в обмотках;
![]() ‑ напряжения,
приложенные к обмоткам.
‑ напряжения,
приложенные к обмоткам.
В уравнениях (5.1 – 5.6) первые слагаемые учитывают падения напряжения на активных сопротивлениях обмоток; а вторые – ЭДС самоиндукции и взаимоиндукции, возникающие при изменении потокосцеплений во времени; третьи учитывают ЭДС вращения, возникающие в обмотках в результате механического движения ротора (внутренняя обратная связь по скорости).
Седьмое уравнение дает зависимость электромагнитного момента М двигателя от скорости изменения энергия магнитного поля W, созданного всеми обмотками, по углу поворота ротора :
![]() =
=![]() (5.7)
(5.7)
По уравнениям (5.1–5.7) может быть составлена структурная схема АД как объекта управления.
Достоинством рассматриваемой модели трехфазного АД является то, что в ней в качестве переменных фигурируют реальные токи и напряжения двигателя. Существенный недостаток – сложность. Уравнения (5.1 – 5.7) содержат 36 собственных и взаимных индуктивностей обмоток, величины которых зависят от углового положения ротора, т.е. являются переменными, а также большое количество блоков перемножения. Т.о. математическая модель трехфазного АД описывается сложной системой нелинейных дифференциальных уравнений с переменными параметрами, численное решение которых практически возможно только с применением ЭВМ.
Для АД с короткозамкнутым ротором полная математическая модель оказывается еще более сложной, т.к. число фаз ротора m в этом случае равно числу расположенных на нем стержней.
Поэтому при исследовании переходных процессов в АД пользуются более простой моделью обобщенной электрической машины.
В теории электрических машин показано, что с учетом симметрии обмоток при некоторых допущениях любая многофазная электрическая машина с n-фазной обмоткой статора и m-фазной обмоткой ротора может быть представлена эквивалентной двухфазной машиной, показанной на рисунке 5.9. В этом случае число уравнений для равновесия напряжений на обмотках сокращается с шести до четырех, а число собственных и взаимных индуктивностей – до 16.
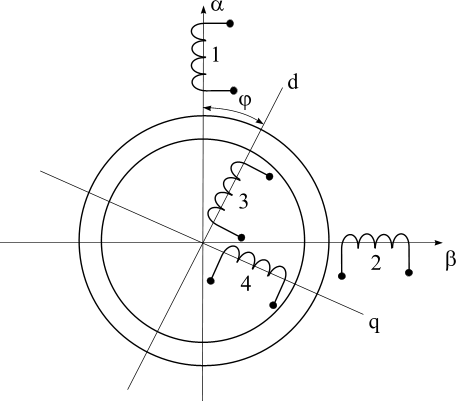
Рис. 5.9. Схема обобщенной электрической машины
Структура же
уравнений остается прежней, т.е. их
записывают для реальных напряжений и
токов двухфазной машины: для обмоток
1, 2 статора в осях координат
![]() ,
неподвижных относительно статора, а
для ротора – в осях
,
неподвижных относительно статора, а
для ротора – в осях
![]() ,
неподвижных относительно ротора.
,
неподвижных относительно ротора.
Пересчет реальных параметров n-m фазной машины к двухфазной и наоборот выполняется по специальным соотношениям, которые можно найти в литературе по теории электрических машин.
Хотя приведение реального АД к двухфазной обобщенной машине и сокращает общее число уравнений с 7 до 5, но модель по-прежнему остается весьма сложной, нелинейной с переменными параметрами.
Дальнейшее упрощение
модели удается получить заменой реальных
токов и напряжений обмоток в системе
координат
![]() ,
жестко связанных со статором и ротором,
расчетными переменными, соответствующими
какой-либо другой системе координат.
,
жестко связанных со статором и ротором,
расчетными переменными, соответствующими
какой-либо другой системе координат.
Вновь вводимые переменные могут быть как вещественными, так и комплексными, связанными с реальными переменными формулами преобразования, обеспечивающими адекватность математической модели реальному объекту.
В качестве новой
системы координат обычно принимают
прямоугольную (ортогональную) систему
координат
![]() ,
вращающуюся в пространстве с некоторой
постоянной скоростью
,
вращающуюся в пространстве с некоторой
постоянной скоростью
![]() .
Рациональным выбором скорости
удается получить систему уравнений, в
которых некоторые из расчетных переменных
или периодически изменяющихся параметров
оказываются постоянными.
.
Рациональным выбором скорости
удается получить систему уравнений, в
которых некоторые из расчетных переменных
или периодически изменяющихся параметров
оказываются постоянными.
Обычно используют 3 варианта такого преобразования:
Вариант
 .
В этом случае оси координат
неподвижны и совпадают с осями
.
В этом случае оси координат
неподвижны и совпадают с осями
 .
Реальные токи и напряжения роторных
обмоток приводятся к расчетным,
изменяющимся с частотой напряжения,
подводимого к статору.
.
Реальные токи и напряжения роторных
обмоток приводятся к расчетным,
изменяющимся с частотой напряжения,
подводимого к статору.Вариант
 .
Оси координат жестко связаны с ротором,
т.е. совпадают с осями
.
Оси координат жестко связаны с ротором,
т.е. совпадают с осями
 .
Реальные токи и напряжения статорных
обмоток приводятся к расчетным,
изменяющимся с частотой тока ротора.
.
Реальные токи и напряжения статорных
обмоток приводятся к расчетным,
изменяющимся с частотой тока ротора.Вариант
 .
Оси координат, обозначаемые в этом
случае через
.
Оси координат, обозначаемые в этом
случае через
 и
и
 ,
вращаются с синхронной скоростью
магнитного поля статора. В этом случае
реальные переменные напряжения,
приложенные к обмоткам статора,
преобразуются в постоянное напряжение,
приложенное по оси
.
,
вращаются с синхронной скоростью
магнитного поля статора. В этом случае
реальные переменные напряжения,
приложенные к обмоткам статора,
преобразуются в постоянное напряжение,
приложенное по оси
.
В ряде случаев применяют и другие более сложные преобразования.
Обратный пересчет к реальным переменным осуществляется по соотношениям, которые можно найти в литературе по теории электрических машин.
Математические модели АД с приведением к обобщенной двухфазной электрической машине используются для разработки различных вариантов специализированных вычислительных устройств, используемых в СУЭП с частотным регулированием скорости.