

1.5. Узлы силовых цепей электродвигателей постоянного тока, обеспечивающие их пуск и торможение
Пуск двигателей мощностью до 5 кВт с малым моментом инерции можно осуществлять прямым подключением к сети. Во всех других случаях в цепь якоря вводят пусковые резисторы так, чтобы пусковые токи не превышали номинальный ток более чем в 2–3 раза.
Изменение направления вращения (реверсирование) и торможение маломощных электродвигателей обеспечивают упрощенные варианты схем, приведенные на рис. 1.4, а–в.
Необходимые для этого переключения в схемах а), б) осуществляется с помощью двух реле, каждое из которых имеет один замыкающий и один размыкающий контакт, либо по одному переключающему контакту.
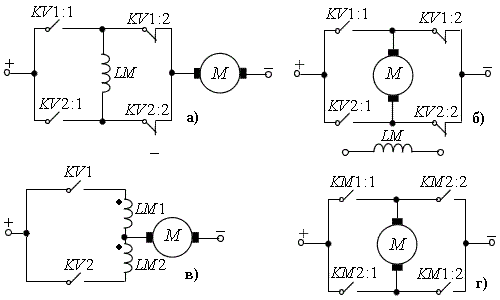
Рис. 1.4. Варианты главных цепей электродвигателей
Постоянного тока
При срабатывании реле КV1 двигатель получает питание по цепи: “+” ‑ КV1:1 –LM ‑ КV2:2 – M ‑ “ – “ и вращается в одну сторону, а при срабатывании реле КV2 по цепи: “ + “ – КV2:1 – LM – КV1:2 – M ‑ “ ‑ “ и вращается в противоположную сторону, благодаря изменению направления тока в последовательной обмотке возбуждения LM. При включении второго реле сразу после выключения первого процесс реверса электродвигателя сопровождается торможением противовключением.
Аналогично работает схема б) при реверсировании электродвигателя изменением направления тока в цепи якоря. Если же при отключении одного реле не включить второе, двигатель перейдет в режим динамического торможения с закорачиванием обмотки якоря через размыкающие контакты КV1:2, КV2:2.
На рис. 1.4 в) приведен вариант управления электродвигателем с двумя обмотками возбуждения, начала которых помечены точками. При замыкании контакта KV1 последовательно с якорем M включается обмотка возбуждения LM1, и двигатель вращается в одном направлении, а при замыкании KV2 двигатель реверсируется, поскольку обмотка LM2 создает магнитный поток противоположного знака.
Схемы а), б). в) применяют в маломощных приводах. Для реверсивного управления более мощными электродвигателями применяют схему 1.4 г) с двумя контакторами KM1 и KM2. При включении KM1 двигатель начинает вращаться в одном направлении, а при включении KM2 – в противоположном, благодаря изменению направления тока в цепи якоря M. Аналогично реверс может осуществляться в цепи обмотки возбуждения (на рис. не показана).
1.6. Типовые схемы управления асинхронными электродвигателями с короткозамкнутым ротором
Одна из распространенных схем управления нереверсивным электродвигателем приведена на рис. 1.5.

Рис. 1.5. Схема управления нереверсивным асинхронным
Электродвигателем с короткозамкнутым ротором
При нажатии пусковой кнопки SB2 замыкается цепь питания катушки магнитного пускателя (контактора) КМ. Срабатывая, пускатель силовыми контактами КМ:1…КМ:3 подключает электродвигатель к сети, а блок-контактом КМ:4 шунтирует пусковую кнопку, обеспечивая нулевую защиту от повторного самозапуска электродвигателя при кратковременном исчезновении или значительном снижении напряжения сети. Повторное включение пускателя после восстановления напряжения сети возможно только после нажатия кнопки SB2.
Отключение электродвигателя производится нажатием стоповой кнопки SB1, разрывающей цепь катушки пускателя.
Защита электродвигателя от перегрузок осуществляется тепловыми реле КК1, КК2, нагревательные элементы которых включены в две фазы статора, а размыкающие контакты ‑ в цепь питания катушки пускателя. Для возможности нового запуска электродвигателя, отключенного с помощью тепловых реле, необходимо предварительно вручную с помощью специальной кнопки вернуть контакты реле в исходное замкнутое положение, что возможно только после остывания реле.
Защита электродвигателя от коротких замыканий осуществляется с помощью плавких предохранителей FU1 ‑ U3, а защита цепей управления - предохранителями FU4, FU5. Разъединитель (рубильник) QS предназначен для отключения цепей питания и управления электродвигателя при осмотрах или ремонтах.
Возможные варианты рассмотренной схемы:
а) вместо рубильника QS и предохранителей FU1…FU3 может быть установлен автоматический выключатель (автомат) с максимальной токовой защиты от коротких замыканий;
б) если величины токов короткого замыкания в силовой цепи и цепи управления примерно одинаковы, предохранители FU4, FU5 можно не применять, т.к. защита всех цепей осуществляется одними и теми же элементами;
в) при использовании автомата с комбинированной максимальной токовой и тепловой защитами отпадает необходимость в применении отдельных тепловых реле КК1, КК2;
г) в четырехпроводных сетях с глухо заземленной нейтралью цепь управления может подключаться на фазное напряжение (фаза–нулевой провод) при обязательном использовании в качестве защитного аппарата в силовой цепи трехполюсного автомата для исключения возможности работы двигателя на двух фазах;
д) для повышения электробезопасности цепи управления могут подключаться на пониженное напряжение от вторичной обмотки трансформатора;
е) цепи управления могут получать питание от независимого источника при обязательном наличии блокировки, разрывающей цепь питания катушки пускателя при исчезновении напряжения в силовой цепи для защиты от самозапуска электродвигателя при последующем восстановлении питания.
В тех случаях, когда необходимо изменение направления вращения, управление электродвигателем осуществляется с применением двух контакторов или реверсивного магнитного пускателя (рис. 1.6).
Включение электродвигателя для одного направления вращения производится нажатием кнопки SB2. Катушка контактора КМ1 получает питание, и замыкающие силовые контакты КМ1:1…КМ1:3 присоединяют двигатель к сети.

Рис. 1.6. Схема управления реверсивным электродвигателем