

6.2.4. Следующий электропривод с шаговым электродвигателем
Данный вариант электропривода (рис. 6.4) получает в последнее время все более широкое применение. Шаговый двигатель Ш.Д получает питание от тиристорного или транзисторного коммутатора К и поворачивает выходной вал дискретно с фиксированным шагом с частотой, определяемой тактовой частотой f задающего генератор Г.

Рис. 6.4. Следящий электропривод с шаговым
Электродвигателем
Это позволяет строить следящую систему без контура обратной связи (принцип разомкнутого управления по жесткой программе).
Задающий элемент ЗЭ преобразует угол поворота задающего вала вх в пропорциональное количество импульсов тактового генератора, и электродвигатель ШД поворачивает выходной вал управляемого объекта УО на соответствующее число шагов, так что вых=вх.
Для повышения точности слежения в переходных режимах используются замкнутые системы управления по отклонению.
6.3. Анализ свойств следящих электроприводов в статике и переходных режимах
6.3.1. Следящая суэп с обратной связью по выходной величине
Простейший вариант непрерывной следящей системы приведен на рис. 6.5.
Примем, что регулятор Р пропорциональный, а преобразователь П линейный безынерционный с выходным сопротивлением Rп = 0. Будем также считать, что электромагнитная постоянная времени якорной цепи двигателя Тя мала по сравнению с электромеханической Тм и ею можно пренебречь.
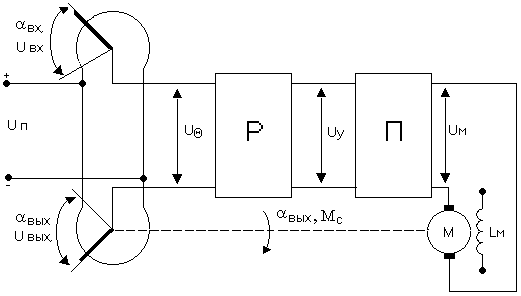
Рис. 6.5. Следящий СУЭП с обратной связью по выходной величине
Тогда рассматриваемый электропривод будет описываться следующей системой алгебраических и дифференциальных уравнений (6.1):
Uм=К1КрКn,
=вх–вых,
![]() ,
,
Jр=СE(i-ic),
=рвых,
где К1, Кр, Кn – статические коэффициенты усиления потенциометров П1, П2, регулятора Р и преобразователя П;
i ‑ ток якорной цепи электродвигателя;
ic ‑ ток якоря, соответствующий моменту сопротивления Мс на валу двигателя;
СE – коэффициент пропорциональности между ЭДС вращения якоря и скоростью , моментом и током электродвигателя;
Ra ‑ сопротивление якорной цепи;
J ‑ момент инерции, приведенный к валу электродвигателя.
Исключая из уравнений (6.1) промежуточные переменные Uм, i, , вых, получаем уравнение (в операторной форме), связывающее угол рассогласования и задающее воздействие вх:
![]() , (6.2)
, (6.2)
где K=K1KрKп![]() ‑ общий коэффициент усиления
разомкнутой системы;
‑ общий коэффициент усиления
разомкнутой системы;
![]() ‑ жёсткость
механической характеристики двигателя.
‑ жёсткость
механической характеристики двигателя.
![]() ‑ электромеханическая
постоянная времени двигателя;
‑ электромеханическая
постоянная времени двигателя;
При скачкообразном изменении задающего воздействия вх(t) после окончания переходного процесса остаётся статическая ошибка, связанная с моментом сопротивления на валу двигателя. Величину её можно определить из уравнения (2), полагая в нем р=0.
Величина статической
ошибки
![]() пропорциональна нагрузке на валу
двигателя и обратно пропорциональна
жесткости механической характеристики
и величине K
общего
коэффициента усиления разомкнутой
системы.
пропорциональна нагрузке на валу
двигателя и обратно пропорциональна
жесткости механической характеристики
и величине K
общего
коэффициента усиления разомкнутой
системы.
Увеличением K можно снизить статическую ошибку до приемлемо малой величины. В переходном режиме появляется дополнительная ошибка, характер изменения которой и максимальная величина зависят от корней характеристического уравнения:
Тмр2+ р + K = 0,
![]() .
.
При
![]() переходной процесс будет колебательным,
причем увеличение K
ведет к росту амплитуды колебаний и
времени регулирования, что затрудняет
возможность повышения таким путем
точности слежения.
переходной процесс будет колебательным,
причем увеличение K
ведет к росту амплитуды колебаний и
времени регулирования, что затрудняет
возможность повышения таким путем
точности слежения.
При линейном
изменении задающего воздействия с
постоянной скоростью
![]() после затухания свободной составляющей
переходного процесса появляется
дополнительная скоростная ошибка
после затухания свободной составляющей
переходного процесса появляется
дополнительная скоростная ошибка
![]() ,
что следует из уравнения (6.2), если в нем
принять р=0.
Величина этой ошибки пропорциональна
скорости вращения входного вала вх
и также снижается с ростом коэффициента
усиления K
разомкнутой системы.
,
что следует из уравнения (6.2), если в нем
принять р=0.
Величина этой ошибки пропорциональна
скорости вращения входного вала вх
и также снижается с ростом коэффициента
усиления K
разомкнутой системы.