

Звено второго порядка (колебательное звено)
Такие звенья описываются дифференциальным уравнением вида:
![]()
Если на вход звена подать единичную функцию Хэвисайда от времени 1[t], при нулевых начальных условиях системы, то реакция на выходе будет называться переходной функцией (или переходной характеристикой), которую часто обозначают как h(t). Сигнал 1[t] — это, в некотором смысле, эталонный испытательный сигнал. Существуют и другие эталонные испытательные сигналы. Например, бесконечный импульс нулевой длины (дельта-функция Дирака), гармонический сигнал, периодические прямоугольные импульсы.
Преобразуем по Лапласу это уравнение:
a0 · p2 · Y(p) + a1 · p · Y(p) + a2 · Y(p) = b · U(p)
или, иначе:
(a0 · p2 + a1 · p + a2) · Y(p) = b · U(p).
Определим передаточную функцию звена:

Если записать уравнение без входного воздействия (нулевые входные воздействия U = 0) и сократить Y, то есть: T2p2 + 2ξTp + 1 = 0, то такое уравнение будет называться характеристическим, поскольку характеризует исключительно внутренние свойства звена. Обратите внимание, что в записи звена содержатся три параметра:
![]()
|
В зависимости от величины ξ звенья второго порядка классифицируются по видам:
ξ = 0 — консервативное звено второго порядка;
0 < ξ < 1 — колебательное звено второго порядка;
ξ ≥ 1 — апериодическое звено второго порядка.
Апериодическое звено 2-го порядка (ξ ≥ 1)
Характеристическое уравнение звена следующее:
T2p2 + 2ξTp + 1 = 0.
И оно имеет действительные отрицательные корни:
![]()
Данное звено можно представить в виде последовательно соединенных звеньев с различными постоянными времени:
![]()
Tогда при T1 > T2 переходная характеристика звена имеет вид:
![]()
То есть в решении присутствуют затухающие экспоненты. Типичное поведение звена с такими параметрами показано на рис. 4.6.
|
||
Рис. 4.6. Реакция апериодического звена на единичный входной сигнал |

В частном случае, когда ξ = 1, оба корня будут одинаковыми, отрицательными:
![]()
Колебательное звено 2-го порядка (0 < ξ < 1)
Характеристическое уравнение звена следующее:
T2p2 + 2ξTp + 1 = 0.
Корни разные, комплексно-сопряженные, с отрицательной вещественной частью:
![]()
, где a = –ξ/T, b = sqrt(1 – ξ2)/T.
Так как корни мнимые, то в поведении звена присутствует колебательная составляющая. Именно за эту особенность поведения звено получило название колебательного (см. рис. 4.7 и рис. 4.8).
|
||
Рис. 4.7. Реакция колебательного звена на входной единичный сигнал (ξ = 0.5) |

|
||
Рис. 4.8. Реакция колебательного звена на входной единичный сигнал (ξ = 0.2) |
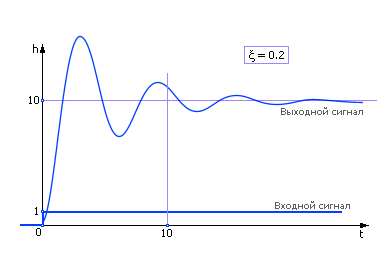
Из графиков видно, что с ростом ξ колебательность звена уменьшается, исчезая при ξ ≥ 1
Переходная функция звена имеет вид:

где
![]()
![]()
![]()
При малых ξ значение A приближается к 1, а значение φ — к 90°. По физическому смыслу ω0 представляет собой собственную частоту колебаний.
Консервативное звено 2-го порядка (ξ = 0)
Характеристическое уравнение звена следующее:
T2p2 + 1 = 0.
Корни одинаковые, комплексно-сопряженные, с нулевой вещественной частью:
Так как корни чисто мнимые, то поведением звена являются незатухающие колебания (ξ = 0), см. рис. 4.9.
|
||
Рис. 4.9. Реакция колебательного звена на входной единичный сигнал (ξ = 0) |

Переходная функция звена имеет вид: h(t) = k · (1 – cos(t/T)).
Из графика экспериментальным путем можно определить единственный параметр T = T0/(2 · π).
Лекция 05. Динамические регрессионные модели, заданные в виде передаточной функции
Построим регрессионную модель динамической системы на примере. Зададим модель в виде передаточной функции (см. рис. 5.1).
|
||
Рис. 5.1. Модель черного ящика в виде передаточной функции |

Примерный вид динамических сигналов на входе и на выходе показан на рис. 5.2. Ограничимся временем рассмотрения сигналов, равным T.
|
||
Рис. 5.2. Возможный вид зависимости входного сигнала X от времени t и зависимости выходного сигнала Y от t для случая с непрерывным временем |

После дискретизации, связанной с обработкой информации на цифровых машинах, эти сигналы будут выглядеть так, как показано на рис. 5.3. Обратите внимание на то, что отдельные отсчеты отстоят друг от друга на расстоянии Δt. Важно, что отсчеты стоят достаточно часто. Всего этих отсчетов — n, то есть T = n · Δt,
|
||
Рис. 5.3. Возможный вид зависимости входного сигнала X от времени t и зависимости выходного сигнала Y от t для случая с дискретным временем |

Допустим, что зависимости, представленные на рис. 5.2 и рис. 5.3, описываются передаточной функцией следующего вида (заметим, что, как и в лекции 02, вид зависимости выдвигается гипотетически и гипотеза должна быть, в конце концов, подтверждена или опровергнута):
![]()
Заменяя значок «p» на «d/dt» (обращаем ваше внимание, что такую замену можно производить только для случая нулевых начальных условий: X(0) = 0 и Y(0) = 0) и учитывая, что передаточная функция — это, по определению, отношение выхода к входу, то есть W = Y/X, получаем дифференциальное уравнение 2-го порядка:
![]()
Дважды проинтегрируем это выражение и получим для некоторого произвольного момента времени t:
![]()
Коэффициенты A1, A2, A3, A4 требуется определить. Для этого выразим уравнение в разностном виде через суммы:
![]()
где n — число экспериментальных точек. Заметим, что мы заменили интегралы и непрерывное течение времени — на суммы и дискретное представление времени. Чтобы вычислить суммы и двойные суммы экспериментально заданных зависимостей x и y, воспользуемся для удобства табл. 5.1 (чтобы излишне не загромождать таблицу, мы не стали дописывать в суммах Δti и Δτj).
Таблица 5.1. Таблица исходных данных и вспомогательных расчетов |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ошибку в некоторой m-ой точке можно записать так:
![]()
Как и ранее, ошибка показывает, насколько отходит теоретическое значение Ym от экспериментального значения.
Суммарная ошибка (вносимая всеми точками), которую надо минимизировать, будет:
![]()
Величина ошибки зависит от значений параметров A1, A2, A3, A4. Поэтому F является функцией от четырех переменных: F(A1, A2, A3, A4). Чтобы найти минимум функции F, доставляемый за счет параметров A1, A2, A3, A4, надо взять частные производные F по каждому из параметров и приравнять каждую производную к нулю. В результате получаем систему линейных уравнений:
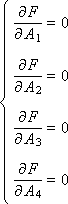
Получено четыре уравнения с четырьмя неизвестными A1, A2, A3, A4. Из решения системы уравнений вычисляем неизвестные коэффициенты и дополняем ими модель, где коэффициенты уже определены как числа:
Задача определения коэффициентов модели решена. Разумеется, как и ранее, необходимо сравнить получаемое из этой модели решение Y теоретическое с Y, заданным экспериментально, и вычислить ошибку F. Далее проверить ее значение по критерию — допустимо ли значение вычисленной ошибки, или гипотезу о виде модели требуется сменить на более точную.
Считая что коэффициенты модели теперь нам известны, построим для заданного примера реализацию, имитирующую поведение системы, описанной передаточной функцией. Для этого воспользуемся уже однажды полученной формулой:
или

Реализация модели представлена на рис. 5.4.
|
||
Рис. 5.4. Техническая реализация передаточного звена после определения коэффициентов регрессионной модели |

При переходе от интеграла к численному суммированию мы воспользовались методом прямоугольников. Разбив площадь под кривой y на ряд прямоугольников одинаковой ширины Δt (см. рис. 5.5), получаем, что площадь i-го прямоугольника равна yi · Δt, а S — сумма площадей всех n прямоугольников — будет приблизительно равна площади под кривой (интегралу от функции y). Очевидно, что приближение тем точнее, чем меньше значение Δt.
|
||
Рис. 5.5. Применение метода прямоугольников для численного вычисления интегралов |

Лекция 06. Модель в виде фильтра Каллмана
Каллманом была доказана теорема о том, что любой динамический сигнал может быть представлен в виде:
Yi = A1 · Xi + A2 · Xi – 1 + … + B1 · Yi – 1 + B2 · Yi – 2 + … + C.
|
||
Рис. 6.1. Графическое представление фильтра Каллмана на схемах |

Идея фильтра Каллмана заключается в том, что выход системы в i-ый момент времени определяется входным сигналом, его предысторией и предысторией самого состояния системы.
Чем больше имеется членов ряда, то есть чем больше переменных Y учитывается в записи модели, тем глубже память системы. Заметим, что наличие члена Yi – 1 в модели динамической системы соответствует наличию первой производной, Yi – 2 — второй производной и т. д.
Допустим, известны следующие экспериментальные данные: состояния сигналов Xi и Yi в n временных точках (табл. 6.1).
Таблица 6.1. Таблица экспериментальных данных |
||||||||||||||||||
|
Поскольку для каждой экспериментальной точки Xi надо указать ее соседей, задаваемых рядом, то удобно отсчеты представить в расширенной таблице, используемой для расчета (см. табл. 6.2).
Таблица 6.2. Таблица экспериментальных данных и промежуточных расчетов |
|||||||||||||||||||||||||||||||||||
|
Находим ошибку между значением экспериментально снятой точки и теоретическим ее значением (гипотезой):
Em = Ym – A1 · Xm – A2 · Xm – 1 – … – B1 · Ym – 1 – B2 · Ym – 2 – … – C.
Суммарная ошибка F (сумма берется по всем экспериментальным точкам) должна быть минимизирована относительно определяемых переменных A1, A2, …, B1, B2, …, C:
![]()
После взятия частных производных от F по A1, A2, …, B1, B2, …, C, приравнивания их к нулю и составления системы уравнений получается линейная множественная регрессионная модель, из которой определяются неизвестные коэффициенты A1, A2, …, B1, B2, …, C модели.
Поскольку коэффициенты модели определены, построим реализацию (см. рис. 6.2), имитирующую поведение системы, описанной фильтром Каллмана.
|
||
Рис. 6.2. Вариант технической реализации фильтра Каллмана |

«Блок задержки» в представленной реализации необходим для того, чтобы сдвинуть сигнал на такт и получить соседний отсчет для следующей переменной ряда модели. В зависимости от среды реализации блок задержки можно организовать разными способами.
Например, в случае реализации блока задержки в среде моделирования Stratum-2000, первый способ может быть основан на перезаписи информации из одной переменной (ячейки) в другую, на что требуется один такт. Таким образом, можно организовать задержку сигнала на любое число тактов. Например, задержка сигнала X относительно Y будет составлять 3 такта, если выполнить следующую последовательность операций: A1 := X; A2 := A1; Y := A2.
Во втором способе задержка организуется при помощи массива: на каждом такте нужно, чтобы цифры были перемещены в соседние ячейки.
На рис. 6.3 приведена схема настройки (автоматического нахождения коэффициентов).
|
||
Рис. 6.3. Схема автоматической настройки коэффициентов модели «на ходу» |

На рис. 6.4 приведена схема проверки фильтра Каллмана.
|
||
Рис. 6.4. Схема проверки работы модели фильтра Каллмана |

Лекция 07. Модель динамической системы в виде Фурье представления (модель сигнала)
Этот способ моделирования динамических систем основывается на том, что в любом сигнале присутствуют гармонические составляющие. В зависимости от частоты, составляющие называются гармониками (первая, вторая и так далее). Сумма гармоник с соответствующими весами составляет модель сигнала.
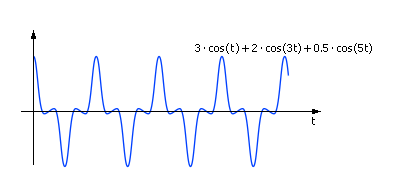
Пусть, например, в некотором сигнале присутствует сумма трех гармоник: 3 · cos(t) + 2 · cos(3t) + 0.5 · cos(5t). Это значит, что в сигнале присутствует первая гармоника с амплитудой 3, третья гармоника с амплитудой 2, пятая гармоника с амплитудой 0.5. Сам суммарный сигнал выглядит так, как показано на рис. 7.1.
|
||
Рис. 7.1. Пример гармонического сигнала |
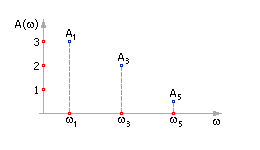
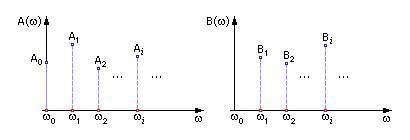
Спектр этого сигнала показан на рис. 7.2. Ясно, что в нашем примере больший вес (амплитуду) в сигнале имеет (более других представлена) первая гармоника, наименьший вес имеет пятая гармоника.
|
||
Рис. 7.2. Пример спектра гармонического сигнала |
Любой сигнал, сколь сложен бы он ни был, может быть представлен суммой гармоник. Более простой сигнал представляется меньшим числом гармоник, более сложный — большим. Быстро меняющийся сигнал, содержащий резкие пики, имеет в своем составе гармоники высоких порядков. Чем больше гармоник представлено в модели сигнала, тем точнее, в общем случае, модель отражает реальный сигнал.
Пусть задан некий сигнал X(t) (рис. 7.3).
|
||
Рис. 7.3. Временной сигнал на входе преобразования Фурье (возможный вид) |

Определимся со временем рассмотрения сигнала: если сигнал периодический, то время рассмотрения равно периоду p сигнала; если сигнал непериодический, то периодом сигнала считается все время его рассмотрения.
|
|
|
|
|
|
… |
… |
|
|
… |
… |
Ai и Bi — это веса соответствующих гармоник, присутствующих в сигнале; i — номер гармоники. Формулы их расчета называются прямым преобразованием Фурье.
Значение 2π · i/p = ωi — это частота i-ой гармоники. Отметим также, что частота i-ой гармоники связана с частотой первой гармоники простым соотношением: ωi = i · ω1.
Отметим важную особенность данного способа представления: вместо всего сигнала во всех его подробностях достаточно хранить вектор чисел, представляющих весовые коэффициенты составляющих его гармоник: (A0, A1, A2, …, B1, B2, …). То есть эти числа полностью характеризуют исходный сигнал, так как по ним сигнал можно полностью восстановить формулой обратного преобразования Фурье:

Именно эти числа используются также при обработке сигнала в модели динамической системы. Изображение этих чисел на графике в зависимости от номера гармоники (частоты) называется спектром сигнала (рис. 7.4). Спектр показывает, насколько присутствует в сигнале соответствующая составляющая. Спектр — это частотная характеристика сигнала.
|
||
Рис. 7.4. Сигнал, представленный в частотной области на выходе преобразования Фурье, спектр сигнала (возможный вид) |
Здесь сигнал представлен в частотной области. Всегда по формулам прямого преобразования Фурье можно перейти из временной области в частотную, а по формулам обратного преобразования Фурье перейти из частотной области во временную. В какой области (частотной или временной) работать с сигналом в отдельный момент, решают из соображений удобства, наглядности и экономии вычислений. Заметим, что емкие с точки зрения вычислений операции интегрирования и дифференцирования сигнала во временной области заменяются на операции алгебраического сложения и умножения в частотной области, что с вычислительной точки зрения реализуется намного точнее и быстрее.
Система чисел Ai и Bi является полной характеристикой сигнала. Такой же полной характеристикой сигнала является система чисел S и φ, которые также образуют спектр (рис. 7.5). S — это амплитудно-частотная характеристика (АЧХ), φ — фазо-частотная характеристика (ФЧХ).
|
||
Рис. 7.5. Сигнал, представленный в частотной области, амплитудно-частотная и фазо-частотная характеристика сигнала (возможный вид) |

Системы «A и B» и «S и φ» являются полностью равнозначными. Переход из системы «A и B» в систему «S и φ» производится по следующим формулам: Si = sqrt(Ai2 + Bi2) — абсолютная амплитуда сигнала; φi = arctg(Bi/Ai) — фаза сигнала, при сложении гармоник нужно учитывать сдвиг фаз (сдвиг фаз проиллюстрирован на рис. 7.8).
В случае с системой «S и φ» обратное преобразование Фурье имеет вид:
![]()
Рис. 7.6 и рис. 7.7 разъясняют смысл коэффициентов A и B разных гармоник. Эти коэффициенты — амплитуды синусов и косинусов соответствующих частот (гармоник). Во временной области графически они соответствуют размаху гармонических колебаний (рис. 7.6 и рис. 7.7); в частотной — высоте спектральной полоски на соответствующей частоте (рис. 7.4).
|
||
Рис. 7.6. Геометрическая иллюстрация параметров А и ω для косинусной составляющей гармонического сигнала |

|
||
Рис. 7.7. Геометрическая иллюстрация параметров В и ω для синусной составляющей гармонического сигнала |

Смысл чисел Si и φi разъяснен на рис. 7.8.
|
||
Рис. 7.8. Геометрическая иллюстрация параметров S и φ для составляющей гармонического сигнала |

Лекция 08. Модель динамической системы в виде Фурье представления (модель объекта)
Пусть имеется входной динамический сигнал X(t) и объект F, преобразующий этот сигнал в выходной Y(t) (см. рис. 8.1). Если объект описывается дифференциальными уравнениями, то таким преобразованием является интегрирование входного сигнала и вычисление Y(t). Интегрирование, как было ранее показано, — операция, требующая значительных вычислительных ресурсов и имеющая значительную погрешность при реализации на цифровых машинах.
|
||
Рис. 8.1. Схема моделирования динамического объекта при переходе из временной области представления в частотную |

Если перейти от описания входного сигнала во временной области к описанию в частотной области (см. рис. 8.1), а от дифференциальных уравнений перейти к частотной характеристике объекта, — то есть, фактически, заменить сигнал на частотную модель сигнала, а объект на частотную модель объекта, — то с вычислительной точки зрения процесс преобразования сигнала упростится. Конечно, полученный результат тоже будет частотной моделью выходного сигнала, которую для получения окончательного ответа придется сконвертировать во временную область Y(t). Процесс такой конвертации из частотной области во временную и обратно называется преобразованием Фурье (есть и другие преобразования). Для тех объектов, для которых известна их модель в частотной области, такой подход достаточно просто реализуется на компьютере и позволяет достичь любой наперед заданной точности.
Модель объекта в частотном виде называется передаточной функцией или АЧХ (амплитудно-частотной характеристикой). Объекты, для которых известны АЧХ, обычно называют типовыми звеньями (усилительное звено, апериодическое, колебательное и т. д.). Пусть, для примера, характеристика объекта в частотной области следующая (см. рис. 8.2).
|
||
Рис. 8.2. АЧХ (возможный вид) |
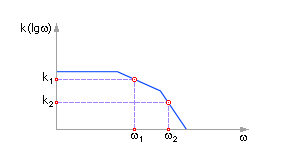
Амплитудно-частотная характеристика (АЧХ) показывает, насколько пропускается объектом на выход соответствующая гармоника. Значение ki характеризует коэффициент усилeния гармонического сигнала на определенной частоте ωi.
Моделирование прохождения сигнала через объект в этом виде заключается в умножении коэффициента Ai гармоники с частотой ωi входного сигнала X(t) на коэффициент усиления ki при той же гармонике с частотой ωi в АЧХ: Ai* = Ai(ωi) · ki(ωi). (Для коэффициента B преобразование аналогично.) В результате получается коэффициент Ai* выходной гармоники данной частоты ωi. Процедура выполняется для всех частот, представленных во входном сигнале и АЧХ. После получения спектра выходного сигнала можно восстановить сигнал как временную зависимость с помощью формулы обратного преобразования Фурье.
Заметим главное: моделирование прохождения сигнала через динамический объект свелось к операции умножения двух переменных, точнее, к операции поэлементного умножения вектора одних переменных на вектор других переменных.
Схема преобразования показана на рис. 8.3.
|
||
Рис. 8.3. Схема процедуры преобразования сигнала при использовании метода Фурье |
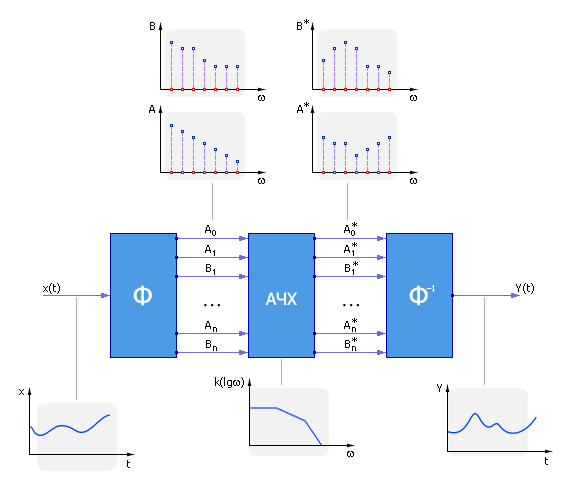
Если бы временной сигнал проходил через звено, которое во временной области представлено дифференциальным уравнением, то пришлось бы его интегрировать, что, конечно, приводит к погрешностям результата. В частотной области достаточно перемножить значения коэффициентов ряда Фурье сигнала и звена при одинаковых частотах. Очевидно, что достоинством метода является замена дифференциальных уравнений модели на алгебраические. Разумеется, данный подход может быть использован только для объектов, у которых известен вид передаточной функции. (Кстати, для неизвестных случаев АЧХ может быть получена численным разложением в ряд.)
В процессе моделирования набора объектов для преобразования сигнала (например, протяженных трактов радиоэлектронных устройств) иногда приходится применять прямое и обратное преобразование Фурье неоднократно. На практике последовательные блоки часто называют каскадами.
Пусть мы имеем радио-электронное устройство (РЭУ), состоящее из 5 блоков (см. рис. 8.4). Блоки 1, 2, 4, 5 — линейные и представлены соответствующими известными АЧХ; блок 3 — нелинейный, поэтому АЧХ для него неизвестна. Примером линейного блока может служить апериодическое звено, колебательное звено и т. д. (см. Лекцию 05. Динамические регрессионные модели, заданные в виде передаточной функции). Примером нелинейного блока может служить устройство ограничения сигнала (срез) по амплитуде.
Как видно из рис. 8.4, сначала входной сигнал X(t) прямым преобразованием Фурье переводится в частотную область и проходит в виде спектра через АЧХ 1 и 2 линейного блока, затем обратным преобразованием Фурье сигнал после 2 блока переводится во временную область. Проходим нелинейный блок 3 во временном представлении. Результат работы блока 3 снова преобразуем прямым преобразованием Фурье в частотную область и проходим через АЧХ блоков 4 и 5. В конце полученный спектр преобразуется с помощью обратного преобразования Фурье во временную область, — вид сигнала, Z(t), является результатом моделирования.
|
||
Рис. 8.4. Пример моделирования тракта, содержащего нелинейные блоки, с использованием метода Фурье |

Метод, который мы рассмотрели, является одним из самых быстродействующих. Это связано с заменой операций интегрирования и дифференцирования, встречающихся в моделях динамических звеньев, на операции сложения и умножения при переходе в частотную область. Такая процедура обеспечивает точность и быстродействие модели.
Для метода важно, с какой частотой вы дискретизируете сигнал при разложении в ряд Фурье. Если частота дискретизации мала, то есть отсчеты в сигнале следуют редко, с большими интервалами, то часть сигнала остается потерянной, так как между отсчетами может оказаться резко возросший и опавший пик, информация о котором пропадет. То есть говорят, что малая частота дискретизации срезает высокие частоты в сигнале. (Пик — это и есть высокочастотная составляющая, которая может быть потеряна).
По теореме Котельникова, чтобы не потерять соответствующую гармонику, требуется дискретизировать сигнал с частотой не менее чем в 2 раза большей, чем самая высокая частота из представленных в аналоговом сигнале:
2Wmax ≤ Wдискр.,
где Wдискр. = 1/Δtдискр. — частота дискретизации, Wmax — максимальная частота, присутствующая в сигнале
Лекция 09. Оценка качества модели
Оценка качества показывает, насколько теоретические вычисления по построенной модели отклоняются от экспериментальных данных. Наличие связи двух переменных называется корреляцией.
Если оценка качества применяется до исследования, то она решает задачу: есть ли связь между входом X и выходом Y и оценивает силу этой связи.