

§11.5.3 Трехмембранное реле усэппа
Для построения систем пневмоавтоматики станков и других технологических машин примерно с 60-х годов XX века начали широко применять аппаратуру среднего уровня давления, реализованную с использованием элементного принципа, при котором система собирается из пневмоэлементов универсального назначения. Одной из наиболее полных является универсальная система элементов промышленной пневмоавтоматики (УСЭППА), которая по своим функциональным и монтажно-коммутационным данным близка к современной промышленной электротехнике. Номенклатура УСЭППА состоит из устройств центральной части, входных, выходных, вспомогательных устройств и монтажно-коммутационных деталей.
Информация через входные устройства (от рабочих органов объекта и датчиков, а также от устройств автоматического ввода программы) поступает в центральную часть системы.
Центральная часть перерабатывает эту информацию и реализует заданную последовательность работы исполнительных механизмов автоматизируемого объекта, выдавая команды им и информацию оператору через выходные устройства.
Набор элементов, образующих УСЭППА, является функционально полным и достаточным для построения любого управляющего устройства аналогового (непрерывного) или аналогово-дискретного действия и любой релейной (дискретной) схемы.
Элементы достаточно просты по конструкции и технологии их изготовления и сравнительно компактны.
Важное свойство элементов системы – их завершенность.
Все элементы имеют определенные технические характеристики, обеспечиваемые при изготовлении, и при включении их в систему управления никакой отладки элементов не требуется.
Важной особенностью устройства УСЭППА является высокая унификация деталей и стыковой монтаж элементов, при котором коммутация межэлементных входов и выходов обеспечивается при помощи каналов, выполненных в платах. Питание элементов УСЭППА (также как и элементов системы ПЭРА) осуществляется сжатым воздухом с давлением 0,14 МПа.
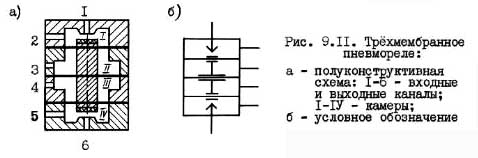
Рассмотрим устройство и работу одного из основных элементов – трехмембранного пневмореле (рис. 9.11).
Реле состоит из двух корпусных деталей, двух крышек и жёсткого центра, соединенного с тремя мембранами. В реле имеются четыре (I-IV) камеры и шесть (1-6) входных и выходных каналов.
Торцы жесткого центра и сопла в крышках образуют в камерах I и IV два пневматических контакта типа сопло-заслонка.
Воздух под давлением подаётся в камеры II и III, при этом в одну из камер воздух подводится постоянно и под пониженным давлением (давление подпора), а в другую - периодически под давлением, равным давлению питания рпит (управляющий сигнал). Принимается, что сигнал управления может быть равен 0 или 1, чему соответствует избыточное давление 0 или 0,14 МПа.
При подаче командного сигнала (в камеру II или III) мембранный блок под действием результирующего усилия от давления этого сигнала в одной камере и давления подпора в другой перемещается вниз или вверх, открывая один контакт и закрывая другой.
Давление подпора принимается равным 0,6 рпит (на рис. 9.12 и 9.13 обозначено перекрестной штриховкой), если при отсутствии управляющего сигнала наиболее важный для обеспечения надёжности работы схемы пневмоконтакт должен быть закрыт, и 0,3 рпит (обозначено обычной штриховкой) – если открыт.

Примеры реализации логических операций посредством мембранного реле показаны на рис. 9.12 – разобраться самостоятельно в последовательности: функция - таблица истинности - работа схемы.