

§ 9.2 Погpешность воспpоизведения, нечувствительность и устойчивость следящей системы
Скорость слежения vс прямо зависит от величины vз и угла подъема профиля копира. В приводе по рис. 8.1 vз= const и vc возрастает с увеличением .
Чем выше vc, тем больше должна быть подача масла в цилиндр и из него, а значит и величина смещения золотника от нейтрального положения.
Расстояние, на которое должен смещаться золотник от нейтрального положения, для того чтобы обеспечились необходимая разность давлений в полостях цилиндра и необходимая скорость его перемещения, определяет собой погрешность воспроизведения (копирования), так как в процессе обработки на такое же расстояние смещаются друг относительно друга щуп и режущий инструмент. Это обуславливает отличие профиля обработанной поверхности от контура копира.
Таким образом, чем больше скорость слежения vc, а также нагрузка R на гидродвигателе, тем больше погрешность воспроизведения.
На качество копируемой поверхности, кроме того, влияет сила трения в рабочем органе, которая изменяется в зависимости от величины и знака скорости слежения и обуславливает образование зоны нечувствительности следящего привода.
На рис. 8.2 показано отличие профиля изделия 1 от профиля копира 2, зависящее от погрешности воспроизведения следящего привода и его нечувствительности.
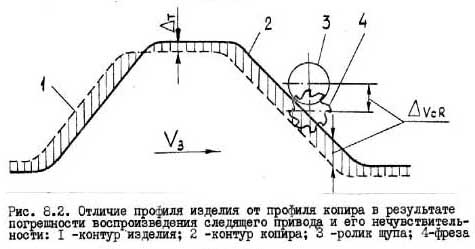
Величина
 характеризует погрешность копирования,
обусловленную погрешностью воспроизведения
следящего привода, связанную с величиной
скорости слежения vc
и нагрузки R. Величина
характеризует погрешность копирования,
обусловленную погрешностью воспроизведения
следящего привода, связанную с величиной
скорости слежения vc
и нагрузки R. Величина
 – погрешность копирования, обусловленная
нечувствительностью следящего привода
в результате действия сил сухого трения.
– погрешность копирования, обусловленная
нечувствительностью следящего привода
в результате действия сил сухого трения.
Таким образом, в результате погрешности следящего привода, пропорциональной величине скорости слежения, контур изделия получается как бы сдвинутым относительно профиля копира в направлении, обратном направлению скорости задания vз.
Инерция и упругость масла, а так же запаздывание при прохождении сигнала управления обуславливает возможность возникновения колебаний в системе. При увеличении амплитуды колебаний система может стать неустойчивой.
Амплитуда этих колебаний может уменьшаться или увеличиваться. Если, например, трение в направляющих рабочих органов будет значительным, колебания будут затухающими, а системе устойчивой. Но если энергия, поступающая по цепи обратной связи, окажется достаточной для преодоления сил трения с некоторым запасом, амплитуда колебаний будет нарастать, объект управления (рабочий орган) будет раскачиваться все сильнее, и система будет неустойчивой.
Под устойчивостью следящей системы управления понимается ее способность возвращаться к установившемуся состоянию после прекращения воздействий, которые вывели систему из этого состояния.
Устойчивость определяет работоспособность системы.
На динамическую точность и производительность станка влияет быстродействие следящей системы, которая характеризуется временем переходного процесса.
Правильный выбор следящего привода заключается в том, чтобы при заданных режимах работы стенка ограничить погрешность воспроизведения и нечувствительность привода требуемыми пределами.
Чувствительность и погрешность копирования также зависят от соотношения осевых размеров поясков золотника и кольцевых канавок его корпуса. По этому признаку различают дросселирующие распределители с положительным, отрицательным и нулевым перекрытием (рис. 8.3).
Распределители с положительным перекрытием (см. рис. 8.3,б) имеют повышенную зону нечувствительности, так как смещение золотника от среднего положения на величину хo не вызовет соответствующего движения инструмента, в результате чего значительно увеличится погрешность копирования.
Распределители с отрицательным перекрытием (см. рис. 8.3,в) лишены этого недостатка, однако их применение сопровождается значительным перепусканием масла из напорной линии системы в сливную, что может привести к падению давления и большим потерям мощности в то время, когда золотник находится вблизи от своего среднего положения.
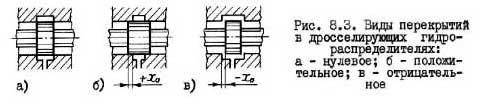
Наилучшими характеристиками обладают дросселирующие распределители с нулевым перекрытием (см. рис. 8.3,а), но практически выполнить его сложно. Поэтому предпочитают распределители с весьма малым отрицательным перекрытием.