

§ 9.6 Многокаскадные гидроусилители
В рассмотренных ранее однокаскадных гидроусилителях вследствие гидростатической неуравновешенности, возникающей в результате погрешностей изготовления золотниковых пар, действия реактивных сил от потоков жидкости и других явлений сила, необходимая для перемещения следящего золотника, может быть большой. Эта сила возрастает с увеличением диаметра золотника, подведенного давления и величины протекающего потока. Поэтому при значительных скоростях копирования и нагрузках в однокаскадных приводах для обеспечения надежной работы в дросселирующем распределителе следует установить пружину со значительной силой натяжения. В результате контактная сила между щупом и шаблоном может составлять 10-30 Н и более.
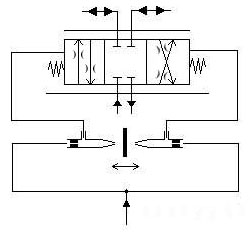
Рис. А12
С целью уменьшения мощности входного сигнала применяют системы с двух-, трех- и более каскадным усилением. Существует достаточное количество различных конструктивных вариантов многокаскадных усилителей. К примеру, от копира через щуп приводится следящий золотник малого диаметра, корпус которого является следящим золотником большого диаметра.
В первом каскаде усиления могут применяться устройства типа сопло-заслонка (рис. А12), устройства со струйной трубкой и другие.
§ 9.7 Электрогидравлические следящие и шаговые приводы
Гидравлические следящие приводы часто применяются в копировальных станках и в станках с ЧПУ. В копировальных станках возможно использование электрогидравлического следящего привода (ЭГСП), а в станках с ЧПУ – ЭГСП и электрогидравлического шагового привода (ЭГШП).
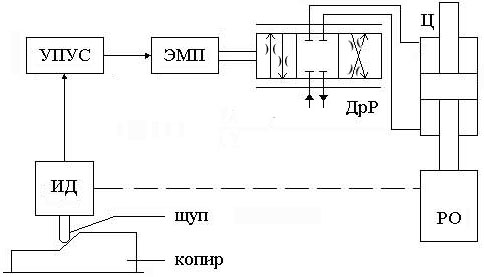
Рис. А13
9.7.1 В электрогидравлических следящих приводах (ЭГСП) применяются дросселирующие распределители с электроуправлением.
В ЭГСП копировальных систем (рис. А13) копир воздействует на щуп датчика, например, индукционного (ИД), сигналы от которого через устройство преобразования и усиления сигналов (УПУС) поступают на электромагнитный преобразователь (ЭМП), обеспечивающий перемещение золотника дросселирующего распределителя (ДрР). ДрР управляет гидродвигателем (Ц) привода рабочего органа (РО) станка. Обратная связь обеспечивается закреплением ИД на РО.
9.7.2 При использовании ЭГСП в станках с ЧПУ работа привода определяется числовой программой, а не профилем копира. Структура ЭГСП подачи РО станка с ЧПУ можно представить следующей схемой.
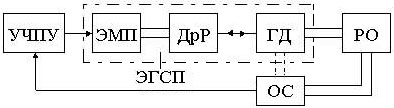
Рис. А14
На схеме (рис. А14) показаны:
УЧПУ – устройство ЧПУ,
ЭМП – электромагнитный преобразователь,
ДрР – дросселирующий распределитель,
ГД – гидродвигатель, в качестве которого могут использоваться гидроцилиндр, гидромотор, поворотный гидродвигатель,
РО – рабочий орган,
ОС – устройство обратной связи.
В ЭГСП обратная связь по положению РО или ГД осуществляется электромеханическим измерительным устройством.
11.7.3 Используемые в станках с ЧПУ ЭГШП имеют следящую систему в гидроусилителе. Структурная схема ЭГШП будет следующей.
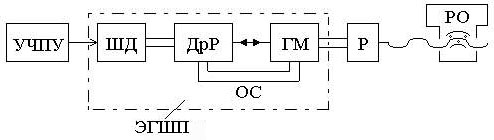
Рис. А15
На схеме (рис. А15) показаны:
УЧПУ – устройство ЧПУ,
ШД – маломощный шаговый электродвигатель,
ДрР – дросселирующий распределитель,
ГМ – гидромотор, Р – редуктор.
В рассматриваемом варианте привода с ЭГШП шаговый электродвигатель малой мощности поворачивает следящий золотник ДрР кранового типа, что обеспечивает подачу масла в ГМ и поворот его вала, связанного с корпусом ДрР, на угол, равный углу поворота вала ШД. Обратная связь, таким образом, обеспечивается связью ГМ с ДрР.
В ЭГШП других исполнений используются дросселирующие распределители осевого типа, соединённые с ШД прецизионной винтовой передачей.