

4.3 Використання напівпровідникової елементної бази в рз. Типові схеми та їх властивості.
Элементные базы. В практике современного релестроения используются три типа элементных баз:
электромеханическая, которая может использоваться для осуществления всех функциональных частей и органов РЗ в виде электромеханических реле;
полупроводниковая, которая может использоваться для осуществления всех функциональных частей и органов РЗ в виде полупроводниковых элементов, аналоговых и цифровых микросхем;
микропроцессорная, которая может использоваться для осуществления измерительной и логической частей РЗ на базе микроЭВМ или многопроцессорных систем, основным элементом которых являются микропроцессоры.
Основные элементы РЗ. Устройство РЗ состоит из реле, соединенных между собой по определенной схеме.
Реле, условно показанное на рис.1.15, а, представляет собой автоматически действующий аппарат, реагирующий на изменение подводимой к его входу электрической величины Х (тока, напряжения или их функций). При определенном значении входной величины X, называемой параметром срабатывания Xс.р реле приходит в действие – срабатывает. При этом на его выходе скачком появляется выходной сигнал (обычно в виде напряжения или тока), воздействующий на подключенную к выходным зажимам реле цепь управления каким-либо устройством, например другим реле или приводом силового выключателя.
В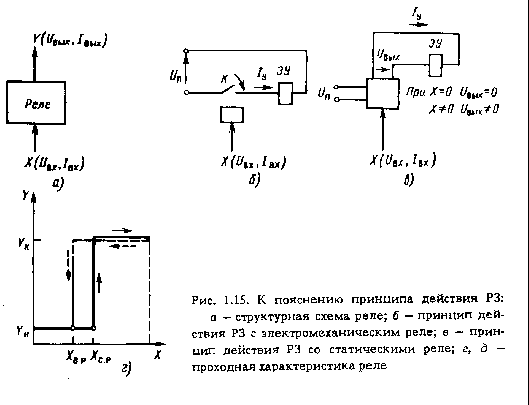 технике РЗ длительное время применяются
реле с коммутирующими контактами –
электромеханические, имеющие подвижные
части. В последние годы широкое
распространение получают более
совершенные реле – бесконтактные,
статические без подвижных частей,
выполняемые на полупроводниковых
элементах. У первых при срабатывании
подвижная система приходит в действие,
контакты К
замыкаются (рис.1.15, б)
и подают на управляемую ими цепь
напряжение UП
от специального источника питания (ИП).
Под действием этого напряжения в
управляемой цепи возникает ток IУ.
У вторых (бесконтактных) реле при
срабатывании на выходе реле возникает
сигнал в виде напряжения UВЫХ
вызывающий появление тока в управляющей
цепи (рис.1.15, в).
На рис.1.15, г
приведена характерная для обоих видов
реле зависимость выходного сигнала Y
от входного X:
Y=(X),
которая
называется проходной характеристикой.
Входной сигнал, при котором реле
срабатывает, обозначен ХCP.
технике РЗ длительное время применяются
реле с коммутирующими контактами –
электромеханические, имеющие подвижные
части. В последние годы широкое
распространение получают более
совершенные реле – бесконтактные,
статические без подвижных частей,
выполняемые на полупроводниковых
элементах. У первых при срабатывании
подвижная система приходит в действие,
контакты К
замыкаются (рис.1.15, б)
и подают на управляемую ими цепь
напряжение UП
от специального источника питания (ИП).
Под действием этого напряжения в
управляемой цепи возникает ток IУ.
У вторых (бесконтактных) реле при
срабатывании на выходе реле возникает
сигнал в виде напряжения UВЫХ
вызывающий появление тока в управляющей
цепи (рис.1.15, в).
На рис.1.15, г
приведена характерная для обоих видов
реле зависимость выходного сигнала Y
от входного X:
Y=(X),
которая
называется проходной характеристикой.
Входной сигнал, при котором реле
срабатывает, обозначен ХCP.
Если после срабатывания реле Х начнет уменьшаться (пунктирная линия на рис.1.15, г), то до некоторого значения XВ.Р Y остается неизменным. Но как только Х станет равным XВ.Р, выходной сигнал скачком снижается до начального уровня YН, и реле возвращается в исходное состояние. Значение XВ.Р называется величиной возврата реле.
Скачкообразное изменение выходного сигнала в реле называют дискретным, а проходную характеристику – релейной. Входной сигнал Х может быть непрерывным (рис.1.14, д) или дискретным (рис.1.14, г). Автоматы любой конструкции, имеющие релейную проходную характеристику, относятся к классу реле.
Виды реле. Элементы ИЧ. Измерительная часть состоит из измерительных реле (ИР), называемых также измерительными органами РЗ (ИО) На вход ИО непрерывно подается один, два или несколько входных сигналов в виде тока или напряжения (IP и UP) защищаемого объекта, дающие информацию о его состоянии. Измерительный орган срабатывает, если входные сигналы фиксируют появление повреждения. Условие срабатывания ИО записывается в виде уравнения UВЫХ=(IР,UР). Проходная характеристика ИО имеет релейный характер (рис.1.15, г). Выходной сигнал имеет два дискретных значения, соответствующих действию и недействию ИО.
В качестве ИО применяются реле тока, напряжения, сопротивления и др. Измерительные реле, действующие при возрастании величины, на которую они реагируют (например, тока), называются максимальными, а при снижении этой величины – минимальными.
По способу включения на ток и напряжение сети измерительные реле делятся на вторичные – включаемые на ток I и напряжение U защищаемого участка через измерительные трансформаторы тока ТА и напряжения ТV (рис.1.16, а, б), и первичные — включаемые непосредственно на первичные токи и напряжения (рис.1.16, в, г).
Вторичные реле имеют существенные преимущества по сравнению с первичными – они изолированы с помощью измерительных трансформаторов от высокого напряжения, располагаются в удобном для обслуживания месте на безопасном расстоянии от оборудования высокого напряжения, могут выполняться стандартными на одни и те же номинальные токи 5 или 1 А и номинальное напряжение 100 В вторичных обмоток измерительных трансформаторов, независимо от напряжения и тока первичной цепи защищаемого объекта.
Э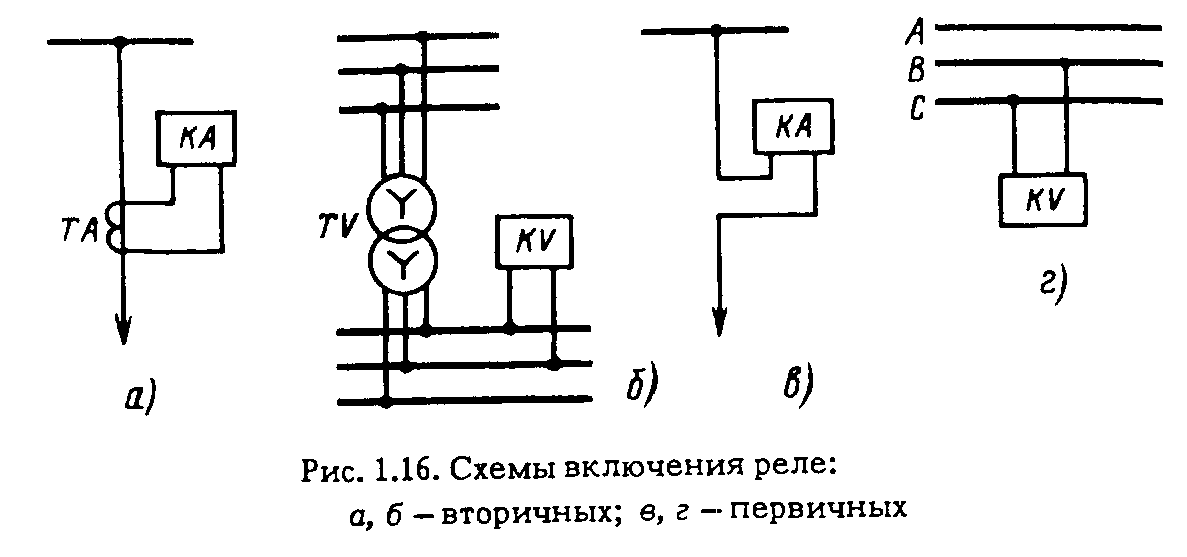 лементы
ЛЧ. Логическая
часть состоит из типовых элементов
(реле) различного назначения: органов
логики (ОЛ),
выполняющих типовые логические операции;
элементов времени (ЭВ)
или органов времени (ОВ),
создающих выдержки времени; органов
памяти (ОП),
продлевающих действие кратковременного
сигнала; сигнальных органов (СО),
подающих сигналы о действии РЗ или ее
отдельных органов. По характеру
выполняемых функций эти реле называются
логическими или вспомогательными (в
отличие от ИО,
которые считаются основными).
лементы
ЛЧ. Логическая
часть состоит из типовых элементов
(реле) различного назначения: органов
логики (ОЛ),
выполняющих типовые логические операции;
элементов времени (ЭВ)
или органов времени (ОВ),
создающих выдержки времени; органов
памяти (ОП),
продлевающих действие кратковременного
сигнала; сигнальных органов (СО),
подающих сигналы о действии РЗ или ее
отдельных органов. По характеру
выполняемых функций эти реле называются
логическими или вспомогательными (в
отличие от ИО,
которые считаются основными).
Элементы исполнительной части. В контактных схемах функции усиления выходных сигналов и размножения сигналов выполняются промежуточными электромеханическими реле с контактами, способными замыкать цепь тока до 5-10 А электромагнитов отключения (ЭО) выключателей или других устройств. В бесконтактных схемах эти функции выполняются с помощью промежуточных реле или посредством тиристорных схем управления.
Элементная база. В устройствах РЗ и электрической автоматики применяются реле, выполняемые на базе электромеханических конструкций, на полупроводниковых приборах, изготавливаемые из отдельных диодов, транзисторов и вспомогательных деталей (резисторов, конденсаторов, трансформаторов). В последнее время широкое распространение получили полупроводниковые реле, основанные на полупроводниковых интегральных микросхемах [34].
Электромеханические реле и выполняемые на их основе РЗ обладают большими габаритами, значительным потреблением мощности, требуют тщательного и трудоемкого ухода за состоянием подвижных частей и коммутационных контактов, имеют ограниченные возможности в обеспечении повышенных требований в части быстродействия и чувствительности.
В 60-х годах, когда в электронной технике получили широкое применение полупроводниковые приборы, они стали использоваться и в РЗ. Сначала появились реле, построенные из отдельных (дискретных) полупроводниковых приборов, соединяемых с помощью монтажных проводников. Такое исполнение позволяло несколько уменьшить габариты и потребление мощности реле, повысить чувствительность и быстродействие. Однако слабой стороной таких реле оказались многочисленные и трудноконтролируемые пайки в соединительных цепях и большое число полупроводниковых элементов [16].
Новые возможности для совершенствования РЗ появились в 70-х годах в связи с появлением ИМС, которые состоят из большого числа транзисторов, диодов, резисторов, конденсаторов, соединенных по типовым схемам. Все указанные элементы и связи с ними выполняются в объеме и на поверхности полупроводниковой пластины, называемой подложкой, с помощью специальной интегральной технологии. Все полупроводниковые компоненты, входящие в состав микросхемы, являются органической частью полупроводниковой пластины и неотделимы от нее. Поэтому каждая ИМС является самостоятельным неделимым элементом, выполняющим определенную функцию. В микросхемах, используемых в устройствах РЗ, может находиться от нескольких десятков до 100 элементов и более, но несмотря на это размеры ИМС соизмеримы с размером одного транзистора. Элементом реле становится микросхема, что уменьшает число составных частей реле и упрощает схему защиты.
Применение ИМС позволяет существенно сократить габариты, массу, потребляемую мощность и повысить надежность РЗ. Интегральные микросхемы помещены в герметический корпус и защищены от влияния внешней среды, что значительно повышает их надежность; успешно решается задача по снижению габаритов, потребления и стоимости аппаратуры. Построение реле на ИМС существенно упрощает и снижает трудоемкость эксплуатационного обслуживания устройств РЗ в целом. Открываются возможности улучшения всех параметров реле и усовершенствования характеристик срабатывания. Отечественная промышленность серийно выпускает реле и РЗ на ИМС [42-44].
Перспективным направлением дальнейшего совершенствования РЗ является их построение на базе микропроцессоров. В нашей стране ведутся разработки и подготовка к производству РЗ на микропроцессорах.
4.4 Використання інтегральних мікросхем в РЗ. Типові схеми на ОП та їх властивості.
4.5 Максимальні струмові захисти, їх різновиди, схеми з’єднання та характеристики.
4.6 Дистанційний захист. Класифікація, схеми виконання та характеристики.
4.7 Диференційний захист. Класифікація, схеми виконання та характеристики.
4.8 Алгоритмічні схеми автоматичних систем та правила їх перетворення. Передавальні функції статичних і астатичних САК.
4.9 Якість систем автоматичного керування. Показники якості. Методи аналізу якості.
4.10 Стійкість систем автоматичного керування. Визначення стійкості. Умови стійкості. Критерії стійкості.
4.11 Динамічні характеристики ланок та систем автоматичного керування.
4.12 Основні принципи керування систе6м автоматичного регулювання.