

23. Устройство управления (уу). Управление работой процессора.
Структура УУ определяется важнейшей характеристикой процессора – адресностью машинных команд. Рассмотрим структуру УУ для двухадресных команд и взаимодействие его элементов в процессе функционирования:
УВв, УВыв, внешняя память, АЛУ
Б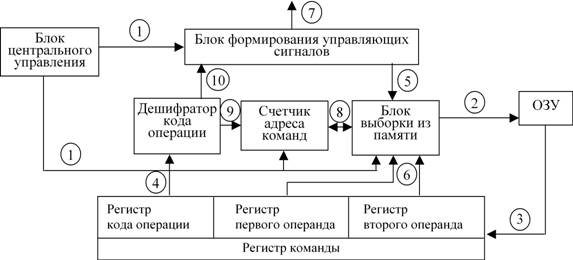 лок
центрального управления генерирует
сигнал о начале выполнения очередной
команды (связь 1). Ее адрес А находится
в счетчике адреса команд.
лок
центрального управления генерирует
сигнал о начале выполнения очередной
команды (связь 1). Ее адрес А находится
в счетчике адреса команд.
Блок выборки из памяти по сигналу считывает из ОЗУ по адресу А, который выбирается из счетчика адреса команд (связь 8), очередную команду (связь 2) и помещает ее на временное хранение в регистр команд (связь 3).
Дешифратор кода операции выбирает код (связь 4) и расшифровывает его. Затем передает информацию блоку формирования управляющих сигналов (связь 10):
· если операция арифметическая, от блока формирования управляющих сигналов поступает сигнал в блок выборки из памяти (связь 5) с командой считать из ОЗУ операнды, расположенные по адресам, указанным в регистрах первого и второго операндов (связь 6), и поместить их в соответствующие регистры АЛУ (о структуре АЛУ см. в п. 9.3). Затем формируется сигнал в АЛУ на выполнение нужной операции (связь 7). Счетчик адреса команд увеличивается на объем команды (связь 9);
· если операция ввода-вывода, блок формирования управляющих сигналов формирует сигнал УВв и УВыв (связь 7). Счетчик адреса увеличивается на объем команды (по связи 9);
· если операция условного перехода, блок центрального управления анализирует результат предыдущей операции, находящийся в АЛУ. Если знак результата отрицателен, в счетчик адреса команд записывается адрес из регистра первого операнда. Если знак положителен, в счетчик адреса команд записывается адрес из регистра второго операнда. Если результат равен 0, в счетчик адреса команд добавляется 1 (эти связи не показаны). Так реализуется принцип условного перехода.
· если операция безусловного перехода, в счетчик адреса команд пересылается содержимое регистра первого операнда (связь не показана).
24. Уу. Управляющие сигналы.
Д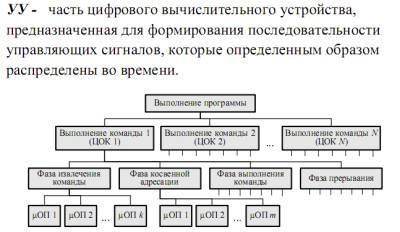 ля
управления трактом данных нам нужно 29
сигналов Их можно разделить на пять
функциональных групп'
ля
управления трактом данных нам нужно 29
сигналов Их можно разделить на пять
функциональных групп'
• 9 сигналов для записи данных из шины С в регистры.
• 9 сигналов для разрешения передачи регистров на шину Ви в АЛУ.
• 8 сигналов для управления АЛУ и схемой сдвига.
• 2 сигнала, которые указывают, что нужно осуществить чтение или запись через регистры MAR/MDR (на рисунке они не показаны)
• 1 сигнал, который указывает, что нужно осуществить вызов из памяти через регистры PC/MBR (на рисунке также не показан).
Значения этих 29 сигналов управления определяют операции для одного цикла тракта данных
25. УУ. Принципы проектирования.
26. Реализация УУ на основе жесткой логики (автомат Мили). Характеристики.
Автомат Мили (англ. Mealy machine) — конечный автомат, выходная последовательность которого (в отличие от автомата Мура) зависит от состояния автомата и входных сигналов. Это означает, что в графе состояний каждому ребру соответствует некоторое значение (выходной символ). В в вершины графа автомата Мили записываются выходящие сигналы,а дугам графа приписывают условие перехода из одного состояния в другое,а так же входящие сигналы. Кодировка автомата Мили: Вершина (операторная или логическая),стоящая после вершины "Начало" ,а так же вход вершины "Конец" помечается символом S1,вершины,стоящие после операторных помечаются символом Sn (n=2,3..).
Синтез микропрограммного автомата Мили Правила построения автомата Мили по ГСА:
4. Каждому пути перехода amY(am,as)as ставят в соответствие переход автомата S из состояния аm в состояние as с выдачей выходного сигнала Y(аm, as). 5. Каждому пути перехода amX(am,a1)a1 ставят в соответствие переход автомата S из состояния аm в состояние a1 с выдачей выходного сигнала Y0 (пустой оператор).

27. Реализация УУ на основе жесткой логики (автомат Мура). Характеристики.
Зависимость выходного сигнала только от состояния представлена в автоматах типа Мура (англ. Moore machine). В автомате Мура функция выходов определяет значение выходного символа только по одному аргументу — состоянию автомата. Эту функцию называют также функцией меток, так как она каждому состоянию автомата ставит метку на выходе.
Функциональная схема автомата Мура
Конечным детерминированным автоматом типа Мура называется совокупность пяти объектов:
![]()
где S, X, Y и b — соответствуют определению автомата типа Мили, а u является отображением вида: u : S -> Y,
с зависимостью состояний и выходных
сигналов во времени уравнением: ![]()
На этапе получения отмеченной ГСА начальная, конечная и операторные вершины отмечают символами а1, а2, … по следующим правилам: 1) Символом а1 отмечают начальную и конечную вершины; 2) Различные операторные вершины отмечают различными символами; 3) Все операторные вершины должны быть отмечены.
При синтезе автомата Мура отмечают не сами операторныевершины. Число отметок на единицу больше числа операторных вершин в ГСА Синтез микропрограммного автомата Мура
Правила определения переходов и выходных сигналов в автомате Мура по ГСА:
1. Каждому пути перехода amX(am,as) as ставят в соответствие переход автомата S из состояния аm в состояние as под действием входного сигнала X(аm, as);2. Каждому пути перехода amas ставят в соответствие переход автомата S из состояния аm в состояние as под действием сигнала единицы.
3. В каждом состоянии независимо от того, откуда в него произошел переход, выдается выходной сигнал, записанныйв операторной вершине, отмеченной символом этого состояния.
28. УУ. Микропрограммное управление. Характеристики.
УСТРОЙСТВО УПРАВЛЕНИЯ ЭВМ - координирует совместную работу процессора, внешней памяти, устройств ввода-вывода и др. посредством управляющих сигналов, вырабатываемых устройством управления в соответствии с реализуемой программой.
Микропрограммное управление, вид иерархического управления работой цифровых вычислительных машин, при котором каждая команда является обращением к последовательности т. н. микрокоманд, обычно более низкого уровня, чем сама команда. Набор микрокоманд называется микропрограммой и обычно хранится в постоянной памяти ЦВМ, составляющей неотъемлемую часть устройства управления. Записанные в памяти микрокоманды определяют работу всех устройств машины, выбирая в каждом такте нужные совокупности элементарных машинных операций, а последовательность микрокоманд обеспечивает выполнение заданной команды. Микрокоманда может содержать три части: оперативную, в которой указываются управляющие входы всех исполнительных устройств машины; адресную, определяющую адрес следующей микрокоманды с учётом условий логических переходов (передач управления); временную, определяющую время выполнения микрокоманды. При этом код конкретной операции программы совпадает с адресом первой микрокоманды соответствующей микропрограммы.
Достоинства Микропрограммное управление состоят в том, что оно обеспечивает операционную гибкость ЦВМ и возможность изменения системы команд и состава машинных операций в зависимости от особенностей решаемых задач и условий применения машины; позволяет сравнительно престо реализовать различные сложные операции при значительной экономии машинного времени; даёт возможность строить диагностические микротесты для определения с большой точностью места неисправности в машине. Основной недостаток, обусловливающий ограниченное распространение Микропрограммное управление, — необходимость применения быстродействующих запоминающих устройств небольшого объёма (несколько тыс. слов) с временем обращения, соизмеримым с временем выполнения элементарных операций в исполнительных устройствах. В вычислительных машинах 3-го поколения широко используется также метод управления, при котором микропрограмма реализуется с помощью системы устройств, а не в виде команд, записанных в памяти ЭВМ; высокое быстродействие, большие объёмы оперативной памяти и богатое математическое обеспечение этих машин позволяют сделать управление более эффективным, чем при Микропрограммное управление в ЦВМ 2-го поколения.
Управляющий автомат, назначением которого является реализация микропрограммы (т. е. управление ее выполнением), называется микропрограммным автоматом (МПА).
Отличие МПА с “жесткой” логикой от МПА с программируемой логикой состоит в том, что в МПА с “жесткой” логикой закон функционирования определяется способом соединения логических элементов, в то время как в МПА с программируемой логикой он задается программой, хранимой в ячейках памяти, называемых управляющей памятью, либо памятью МК.