

5.2. Передающие преобразователи с магнитной компенсацией
Передающие преобразователи с магнитной компенсацией предназначены для преобразования линейного перемещения чувствительного элемента в унифицированный выходной сигнал постоянного тока. Принцип действия таких преобразователей заключается в том, что управляющий магнитный поток, создаваемый в специальном устройстве – индикаторе магнитных потоков, при перемещении подвижного элемента – постоянного магнита компенсируется магнитным потоком обратной связи, создаваемым в этом же индикаторе током обратной связи. При этом устанавливается определенная зависимость между выходным током и перемещением подвижного элемента, а значит, и значением измеряемой величины. Структурная схема преобразователя приведена на рис. 5.6.

Рис. 5.6. Структурная схема преобразователя с магнитной компенсацией:
1 – чувствительный элемент; 2 – постоянный магнит; 3 – индикатор магнитных потоков;
4 – усилитель; 5 – устройство обратной связи
Упругий чувствительный элемент 1 первичного преобразователя преобразует измеряемую величину y в линейное перемещение х постоянного магнита 2 преобразователя. При перемещении магнита изменяется управляющий магнитный поток ФМ, который в индикаторе магнитных потоков 3 сравнивается с магнитным потоком обратной связи о.с. На выходе индикатора появляется напряжение U, пропорциональное разности магнитных потоков = М – о.с, которое усилителем 4 преобразуется в выходной токовый сигнал Iвых.
Выходной ток Iвых поступает в линию дистанционной передачи и одновременно в устройство обратной связи 5, выходной ток которого Iо.с, создает магнитный поток Фо.с, компенсирующий магнитный поток ФМ. Таким образом, при увеличении измеряемой величины у увеличивается смещение магнита х, увеличивается управляющий магнитный поток М и, следовательно, необходимы большие выходной ток Iвых и ток обратной связи Iо.с для создания магнитного потока Фо.с, компенсирующего ФМ.
Магнитная система преобразователя состоит из двух магнитопроводов, двух индикаторов магнитных потоков и расположенного между ними подвижного магнита. Для упрощения рассмотрения принципа образования магнитного потока ФМ рассмотрим схему магнитных потоков лишь в одном магнитопроводе (рис. 5.7), поскольку схема потоков в другом магнитопроводе аналогична. Основной магнитный поток Ф1 постоянного магнита 1 замыкается через магнитопровод 2. Меньшие потоки Ф2 и Ф3 замыкаются через магнитопровод индикатора магнитных потоков 3. Потоки Ф2 и Ф3 направлены навстречу друг другу. Магнитный поток ФМ представляет собой разность потоков Ф2 и Ф3, т. е. результирующий поток, протекающий по магнитопроводу индикатора, ФМ = Ф2 – Ф3.
В среднем положении магнита (рис. 5.7, а) потоки Ф2 и Ф3 равны и противоположно направлены, поэтому результирующий поток ФМ = Ф2 – Ф3 практически отсутствует. При смещении магнита, например, вправо (рис. 5.7, б) от нейтрального положения, поток Ф2 становится больше потока Ф3 и по магнитопроводу индикатора 3 начинает протекать результирующий магнитный поток ФМ = Ф2 – Ф3. определенного направления. Интенсивность этого потока зависит от степени смещения магнита, следовательно, это смещение определяется значением измеряемой величины, ФМ также зависит от этого значения. На магнитопроводе индикатора размещены обмотка возбуждения, питаемая пульсирующим током, и обмотка обратной связи, по которой протекает постоянный ток обратной связи.


а б
Рис. 5.7. Схема образования управляющего магнитного потока
Преобразователь с магнитной компенсацией содержит один подвижный магнит, два вспомогательных магнитопровода и два индикатора магнитных потоков I и II (рис. 5.8).
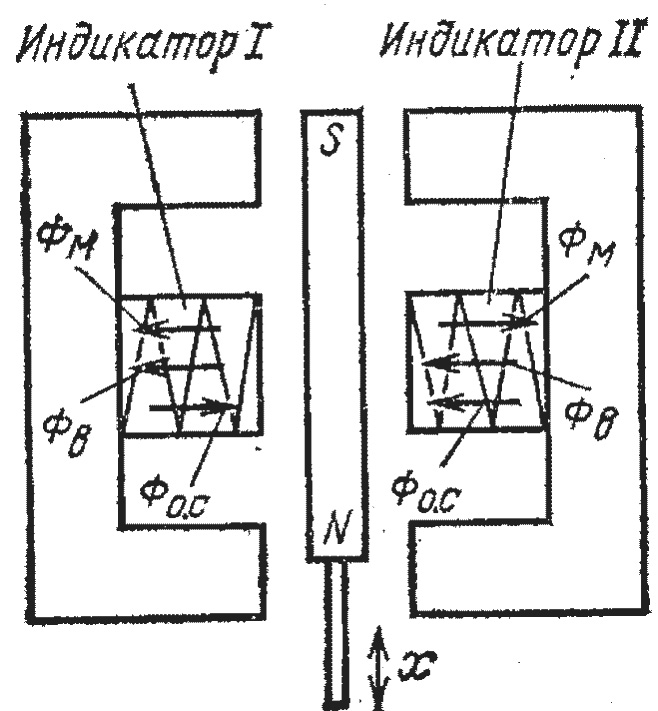
Рис. 5.8. Конструктивная схема преобразователя с магнитной компенсацией
Таким образом, электрическая схема преобразователя содержит по две обмотки возбуждения и обратной связи, расположенные на двух разных индикаторах магнитных потоков. Магнитные потоки постоянного магнита ФМ и обмотки обратной связи Фо.с в каждом индикаторе направлены навстречу друг другу, а магнитный поток обмотки возбуждения Фв в одном индикаторе (например, I) складывается с ФМ, а в другом они вычитаются (см. рис. 5.8).
Преобразование магнитного потока ФМ в постоянный выходной ток рассмотрим, используя электрическую схему преобразователя (рис. 5.9). Обмотки возбуждения wв индикаторов I и II и резисторы R1 и R2 образуют измерительный мост. В одну диагональ этого моста подводится напряжение питания Uв, а с другой снимается выходной сигнал Uвых.
Работа преобразователя основана на использовании явления магнитного насыщения материала магнитопровода индикатора магнитных потоков. Предположим, что первоначально потоки Фо.с и ФМ равны нулю. В этом случае в магнитопроводе индикаторов присутствуют только магнитные потоки Фв, создаваемые токами возбуждения I1 и I2. Рассмотрим изменение этих токов во времени. Из-за наличия

Рис. 5.9. Электрическая схема преобразователя с магнитной компенсацией
диодов токи I1 и I2 проходят через обмотку возбуждения только в положительный полупериод напряжения Uв.
В промежутке t0…t1 (рис. 5.10, а, б) с возрастанием Uв возрастают токи возбуждения I1 и I2, при этом также увеличиваются магнитные потоки Фв.
В момент t1 магнитные потоки Фв насыщают магнитопроводы индикаторов, при этом индуктивность и полное сопротивление обмоток резко уменьшаются и значения токов резко возрастают. В интервале t1…t2 токи изменяются по синусоиде, в интервале t2…t3, токи равны нулю из-за запирания диодов, в момент t3 процесс изменения токов повторяется. Таким образом, в любой момент времени I1 = I2, поэтому сигнал Uвых, снимаемый с балластных сопротивлений R1 и R2, в любой момент также равен нулю, Uвых = I1R1 – I2R2 и R1 = R2. При смещении магнита в обоих магнитопроводах появляется поток ФМ постоянного магнита. Предположим, что в индикаторе I он складывается с потоком Фв обмотки возбуждения, а в индикаторе II вычитается (см. рис. 5.8). Это приводит к тому, что в магнитопроводе индикатора I состояние насыщения наступает раньше (момент t1 на рис. 5.10, в), чем в магнитопроводе индикатора II (момент t2 на рис. 5.10, в).
Вследствие этого резкое увеличение тока I1 происходит раньше, чем тока I2. Следовательно, в интервале t1÷t2 ток I1 > I2 и, следовательно, падение напряжения на R1 будет больше, чем на R2, т.е. Uвых 0. Это напряжение усредняется емкостью C и поступает на вход усилителя, который преобразует его в выходной ток Iвых. Пропорциональный току Iвых ток обратной связи Iо.с вызовет появление потока Фо.с, компенсирующего поток ФМ. При этом восстановится приближенное равенство I1 I2 для любого момента времени.
Увеличение ФМ, при увеличении значения измеряемой величины, ведет к увеличению Фо.с, что обеспечивается увеличением Iвых и Iо.с. Таким образом, устанавливается однозначная зависимость между значениями измеряемой величины и выходного тока.

Рис. 5.10. Временная диаграмма токов и напряжений в схеме преобразователя с магнитной компенсацией
Достоинства: возможность подключения нескольких вторичных приборов к одному преобразователю, достаточно высокая устойчивость к вибрации и надежность.
Недостатки: высокая температурная погрешность, большое влияние на погрешность первичного преобразователя погрешностей чувствительного элемента и индикатора магнитных потоков, так как они не охвачены обратной связью. Это ограничивает возможность создания точных приборов с такими преобразователями.
Преобразователи этого типа имеют класс точности 1 и 1,5. В качестве вторичных приборов используются миллиамперметры с соответствующим диапазоном измерения.