

Контрольные вопросы
Сравните по точностным показателям и диапазону применения различные расходомеры: объемные, переменного уровня, обтекания, переменного перепада давления, тахометрические, вихревые, электромагнитные, ультразвуковые.
Достоинства и недостатки различных расходомеров:
– тахометрических;
– на основе сужающих устройств и дифманометров;
– ротаметров;
– электромагнитных расходомеров;
– ультразвуковых расходомеров на основе эффекта Доплера и корреляционных.
Особенности построения расходомеров с вычислением массы (счетчики газа) или вычислением теплоты (теплосчетчики).
Особенности измерения расхода для вязких и сыпучих сред, для стоков с незаполненным коллектором.
Назовите фирмы, выпускающие промышленные средства измерения расхода.
Каковы тенденции развития средств измерения расхода для современных микропроцессорных систем автоматизации?
10. Измерение положения, скорости, ускорения
10.2. Фотоэлектрические преобразователи положения
Фотоэлектрические преобразователи положения получили в последнее время широкое распространение в станках с ЧПУ, в робототехнике и других промышленных позиционных и следящих системах. Это связано, во-первых, с удобством сопряжения фотоэлектрических датчиков с микроЭВМ, широко применяемых в настоящее время. Во-вторых, технический прогресс в области оптоэлектроники и лазерной техники позволяет создавать в настоящее время фотоэлектрические датчики с требуемой точностью, недостижимой в других датчиках положения.
Конструкция и принцип работы кругового фотоэлектрического датчика ВЕ-178 показаны на рис. 10.27. Он состоит из трех частей: механической, оптической и электронной.
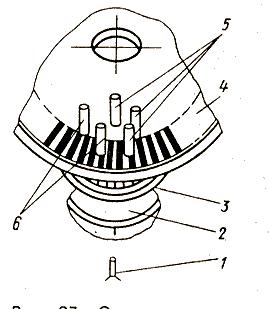
Рис. 10.27. Основные конструктивные элементы фотоэлектрического преобразователя
Механическая часть служит для точного вращения входного вала преобразователя относительно корпуса. Базовая поверхность для установки и присоединения фотоэлектрического преобразователя к станку обеспечивает соосное расположение его оптической и электронной частей. Преобразователь защищен от пыли, влаги и механического воздействия. Оптическая часть содержит светодиод 1, линзу 2, растровую индикаторную пластину 3 и растровый диск 4. Световой поток светодиода 1 проходит через линзу 2, растровую индикаторную пластину 3 и растровый диск 4. При вращении растрового диска 4 меняется интенсивность света, пропускаемого через растровое сопряжение, образуемое диском 4 и пластиной 3. В результате меняется фототок через основные фотодиоды 5 и фотодиоды 6, служащие для выработки компенсационных сигналов.
На индикаторной пластине растры расположены в два сектора и сдвинуты один относительно другоro на 1/4 шага растров. Два фотодиода, установленные под каждым из этих секторов и сопрягаемыми с ними растрами диска, выдают первичные сигналы sin τ0 и сos τ0, где τ0 – относительное смещение подвижного и неподвижного растров. Фотодиод, расположенный в центральной части растрового диска, выдает третий сигнал начала отсчета (нулевой сигнал).
Первичные сигналы всех трех каналов поступают вначале на усилители напряжения, а затем на формирователи, преобразующие синусоидальные сигналы в прямоугольные импульсы, амплитуда и форма которых не зависят от изменения амплитуды синусоиды. После формирователей сигналы передаются на усилители мощности и инверторы. В результате на выходе образуются шесть сигналов (три основных и три инверсных). С помощью этих шести сигналов определяются начальная точка отсчета перемещения, пройденный угол и направление вращения датчика.
Наличие двух каналов датчика (sin τ0 и сos τ0) обусловлено необходимостью определения направления вращения, и вместе с тем это дает возможность при числе сигналов z за один оборот вала датчика формировать z, 2z и 4z импульсов в измерительной системе. Кроме того, за счет интерполяции сигналов датчика в каждом из каналов можно получить количество сигналов vиz, где vи – кратность интерполяции. Так, в датчиках ROD (ФРГ) при количестве рисок 36 000 число измерительных импульсов равно 3 600 000 (тип датчика ROD-800, v = 100).
Поскольку учетверение (удвоение) числа импульсов и определение направления вращения характерны для любого типа импульсного датчика, то далее приводятся функциональные схемы и временные диаграммы устройств умножителей импульсов и дискриминаторов направления вращения, реализующих эти функции. На рис. 10.28, а представлена схема умножителя, осуществляющая учетверение импульсов, получаемых от датчика, а на рис. 10.28, б – временные диаграммы.
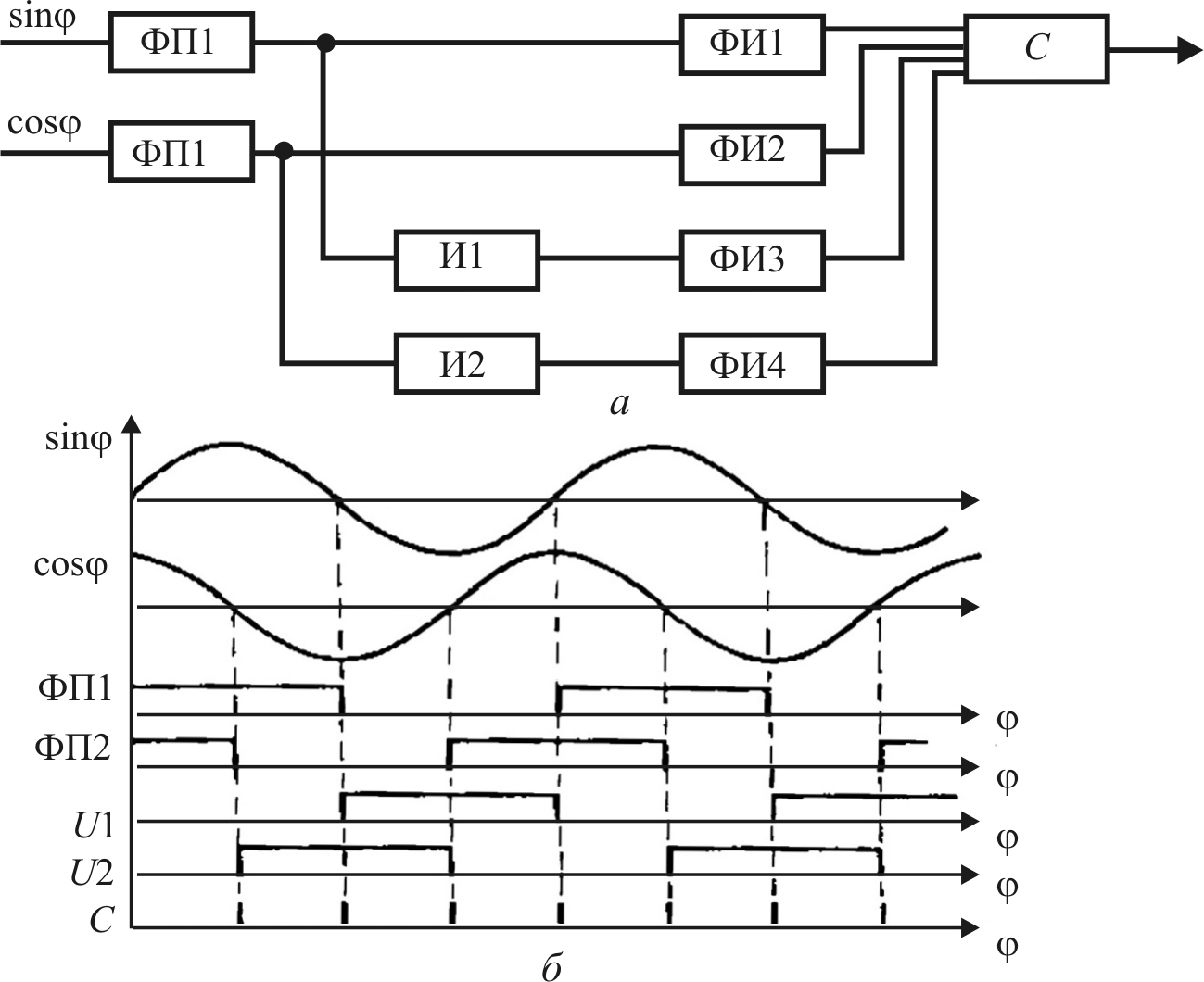
Рис. 10.28. Учетверение сигналов датчика: а – схема, б – временная диаграмма сигналов
Формирователи ФП1 и ФП2 преобразуют входные сигналы sin τ0 и сos τ0 в импульсы прямоугольной формы, которые после прохождения через инверторы И1 и И2 поступают на формирователи ФИ1-ФИ4, на выходе каждого из которых формируются импульсы на передних фронтах. На выходе сумматора С образуется последовательность импульсов, частота которой в 4 раза превышает исходную.
На рис. 10.29, а представлена функциональная схема дискриминатора направления вращения.
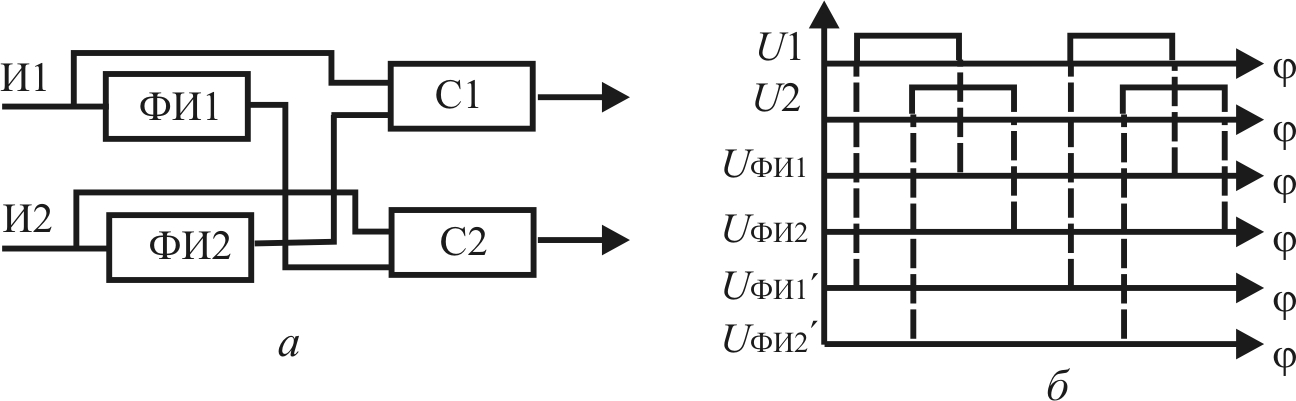
Рис. 10.29. Дискриминатор направления вращения: а – схема, б – временная диаграмма
Последовательность прямоугольных импульсов И1 и И2, сдвинутых на 90, поступает на входы формирователей импульсов ФИ1 (ФИ2) и на входы сумматоров С1 (С2).
При вращении датчика в сторону увеличения угла φ на выходе формирователей импульсов ФИ1 и ФИ2 образуется последовательность импульсов Uфи1 и Uфи2, а при вращении в сторону уменьшения φ – Uфи1' и Uфи2'. Сумматоры С1 и С2, собранные по схеме «И», разрешают прохождение сигналов на выход С2 в первом случае и на С1 во втором. Временные диаграммы показаны на рис. 10.29, б.
Данные по импульсным датчикам даны в табл. 10.12. Ниже приведены дополнительные технические характеристики самых распространенных фотоимпульсных датчиков.
Технические характеристики ВЕ-178
Выходные сигналы 6:
I – основной;
II – инверсный основному;
III – смещенный;
IV – инверсный смещенному;
V – начало отсчета;
Vl – инверсный началу отсчета.
Фазовый угол между I и III сигналами, эл. град 90
Отклонение фазового угла между I и III сигналами, эл. град . ±10
Активная длительность импульсов V и VI сигналов, мкс 1
Скважность I и III сигналов 2±0,2
Активная длительность фронта и среза, мкс, не более:
при длине кабеля 10 м 1
при длине кабеля 30 м 2,5
Допускаемая предельная систематическая погрешность в интервале
360 угла поворота вала, угл. мин, не более 4
Дополнительная погрешность за счет нестабильности в течение
16 ч работы, угл. мин, не более 0,5
Допускаемое угловое ускорение на вал, рад/с2 1100
Показатели надежности и долговечности:
наработка на отказ, ч 4000
средний ресурс, ч 40 000
средний срок службы, лет 10
Технические характеристики ПДФ-9: датчик поворотный дискретный фотоэлектрический для формирования и выдачи в дискретной форме сигналов управления преобразователями частоты в регулируемом электроприводе с двигателями постоянного и переменного тока, а также сигналов обратной связи для построения на базе такого электропривода следящей системы по скорости и положению.
Всего выходных сигналов – 11, из них: 6 сигналов – датчик положения для следящих приводов, 3 сигнала – датчик положения ротора для вентильного электропривода, 2 сигнала – аналоговый бесконтактный тахогенератор. Длительность фронтов – не более 1 мкс. Наработка на отказ – не менее 10 000 ч.
Разновидностью фотоэлектрических преобразователей являются так называемые оптические линейки. К ним относится преобразователь отечественного производства типа ВЕ-162. Он состоит из трех частей: растровой линейки в корпусе с пыле- и брызгозащищенными крышками, преобразующей головки с индикаторным растром и свето- и фотодиодами предварительного усилителя сигналов.
Растровая линейка представляет собой стеклянную полоску с нанесенными на ней штрихами с шагом 20 или 40 мкм.
Таблица 10.12. Технические характеристики фотоэлектрических датчиков положения
Наименование датчика |
nmax, об/мин |
Число Z, имп/об |
Кол-во вых. сигналов |
fmax, кГц |
Параметры вых. сигналов |
Масса, кг |
Разработчик, изготовитель |
Круговые фотоэлектрические датчики положения |
|||||||
ПДФ-3 |
3000 |
600 |
6 |
100 |
«1» → 22 в «0» →3 В |
4 |
Башкирское ПО «Электроаппарат» |
ПДФ-5 |
4000 |
250–2500 |
6 |
|
1,2 |
||
ПДФ-9 |
6000 |
125–2500 |
11 |
100 |
«1» > 12 в «0» <1,5 В |
2,3 |
ВНИИ «Электропривод» Уфимский з-д низковольтной ап-ры, 1987 г. |
ВЕ-106 |
|
1000, 1024, 1250 |
6 |
50 |
«1» > 11,5 в «0» <1,5 В |
0.5 |
ЛЭМЗ |
ВЕ-178 |
|
100–2500 |
6 |
63 |
«1» > 12 в «0» <1,5 В |
1,5 |
|
ПИКП2-1Ф |
6000 |
1000 2500 5000 |
6 |
|
«1» > 2,4 в «0» <0,8 В |
0,8 |
ЛЭМЗ С 1987 г. |
ПИКП2-2Ф |
10000 |
1000 2500 |
6 |
|
0,4 |
||
Линейные фотоэлектрические датчики |
|||||||
ВЕ-164 |
|
Шаг 0.02 мм |
6 |
|
Синусные |
|
ЛЭМЗ Умножитель в 1; 5; 10 раз |
Преобразующая головка состоит из индикаторной решетки, четырех светодиодов, четырех осветительных линз, четырех зеркал, четырех фотодиодов, четырех собирающих линз и ряда механических деталей.
Предварительный усилитель сигналов усиливает сигналы, поступившие от приемников излучения, и осуществляет их инверсию.
Действие измерительного преобразователя линейных перемещений основано на модуляции светового потока по амплитуде при прохождении его через сопряжение двух перемещающихся друг относительно друга растров.
Оптическая схема приведена на рис. 10.30.
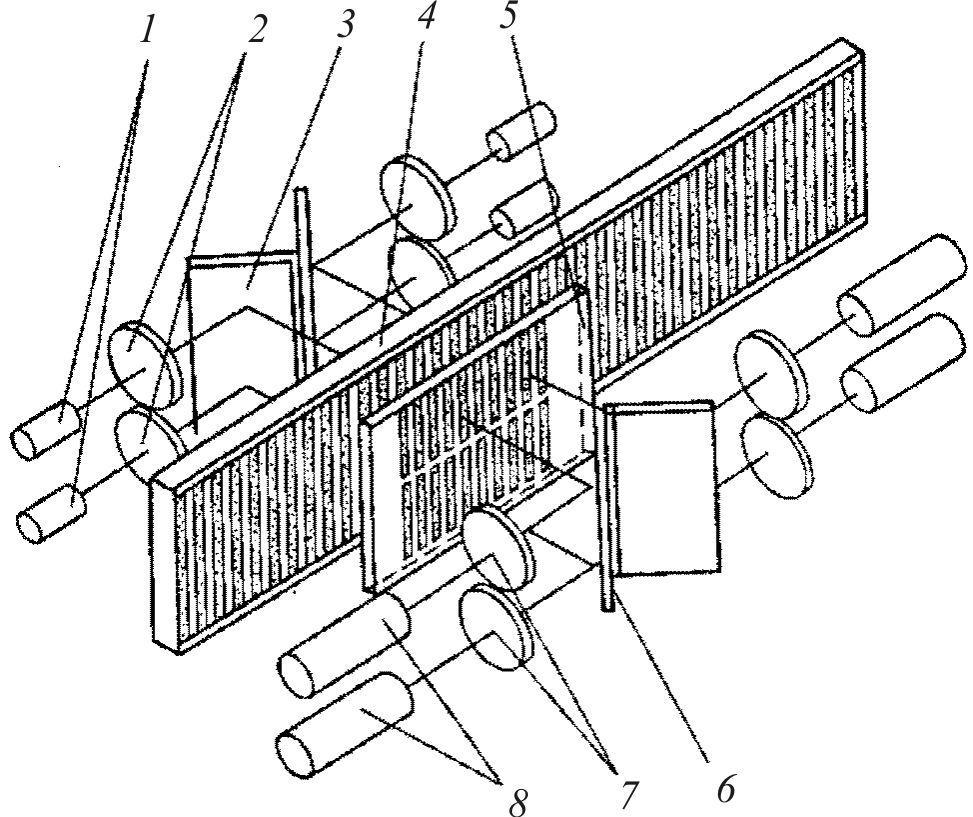
Рис. 10.30. Линейный растровый преобразователь перемещения
Световые потоки от светодиодов 1 направляются к фотодиодам 8 через растровое сопряжение, состоящее из растровой линейки 4 и индикаторного растра 6, с помощью осветительных линз 2, зеркал 3 и 6 и собирающих линз 7. Индикаторная решетка представляет собой стеклянную пластину с нанесенными на ней четырьмя группами штрихов с шагом деления 20 или 40 мкм. Штрихи каждой группы смещены друг относительно друга на четверть периода растра. При перемещении преобразующей головки вдоль растровой линейки световой поток модулируется растровым сопряжением и, попадая на фотодиоды 8, преобразуется в электрические сигналы, изменяющиеся по закону, близкому к синусоиде. Поскольку штрихи четырех групп индикаторной решетки смещены друг относительно друга на четверть периода растра, то фазовый сдвиг между четырьмя формирующими синусоидами составляет угол 90 эл. град. Над каждой из групп штрихов установлена пара фотодиодов, сдвинутых на 1/2 шага. Они включены встречно, поэтому постоянные составляющие сигналов компенсируются, а амплитуда удваивается. Четыре синусоидальных сигнала, получаемых на выходе измерительного преобразователя линейных перемещений, дают информацию как о перемещении, так и направлении движения узла станка.
Измерительный преобразователь линейных перемещений ВЕ-162 имеет несколько модификаций в зависимости от диапазона перемещений, составляющего 250÷800 мм. Габаритные размеры унифицированы по ширине и толщине 82х28 мм и изменяются лишь по длине (410÷960 мм).
Техническая характеристика измерительного преобразователя линейных перемещений ВЕ-162
Масса, кг 0,6÷1,5
Максимальная скорость перемещения, м/мин 15
Предел допустимого значения систематической
составляющей погрешности, мкм, не более 0,5
Дополнительная погрешность реверса, мкм, не более 2,5
Дополнительная погрешность за счет
нестабильности работы, мкм не более 1