

10.3. Кодовые датчики положения
Недостаток круговых импульсных датчиков положения – относительная система координат. Если происходит кратковременное прекращение питания датчика, то уже не удастся определить, в каком положении внутри оборота находится механизм. Приходится производить «нулирование» – возвратное перемещение механизма по всем координатам в начальное положение в точку, от которой производится отсчет координат, а затем уже возвращаться к точке, где произошло прерывание программы. Таким образом, отсчет координат происходит только от исходной точки механизма.
Кодовые датчики положения позволяют сразу после включения питания дать информацию о положении внутри оборота. Все кодовые датчики работают в коде Грея.
Код Грея – двоичный код датчика положения, в котором между двумя соседними значениями кода имеется разница только в одном разряде.
Для четырехразрядного числа обычный код и код Грея имеют следующий вид:
|
Двоичный код |
Код Грея |
|
Двоичный код |
Код Грея |
0 |
0000 |
0000 |
8 |
1000 |
1100 |
1 |
0001 |
0001 |
9 |
1001 |
1101 |
2 |
0010 |
0011 |
10 |
1010 |
1111 |
3 |
0011 |
0010 |
11 |
1011 |
1110 |
4 |
0100 |
0110 |
12 |
1100 |
1010 |
5 |
0101 |
0111 |
13 |
1101 |
1011 |
6 |
0110 |
0101 |
14 |
1110 |
1001 |
7 |
0111 |
0100 |
15 |
1111 |
1000 |
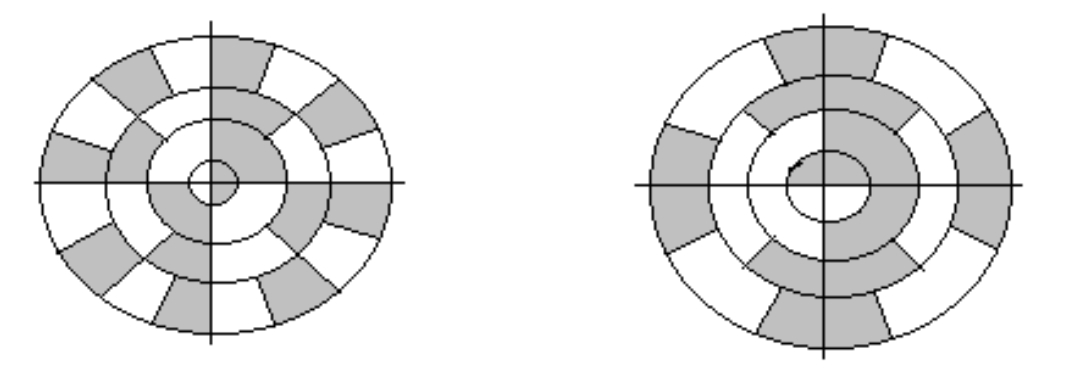
Код Грея построен на основе диаграммы Карнауга (рис. 10.31). На этом же рисунке изображены 4-разрядные датчики положения, которые работают по обычному коду и коду Грея. Можно увидеть, что в датчике 1-го типа в одном из положений происходит изменение сразу по четырем разрядам (0000–1111). Это не позволяет получить простые достоверные датчики положения.

 а
б
а
б
Рис. 10.31. Диаграмма Карнауга и кодовый датчик положения, работающий: а) в двоичном коде; б) в коде Грея
Кодовые датчики положения имеют от 12 до 16 разрядов, что позволяет получить высокую точность.
Перевод кода Грея в обычный двоичный код осуществляется по следующим правилам: первая единица со стороны старших разрядов остаётся без изменения, последующие цифры остаются без изменения, если число единиц им предшествовавших старших разрядов чётно, и инвертируется, если число единиц нечётно.
Кодовые датчики используется в позиционных системах станков и роботов, особенно в ранних версиях. Такой датчик использовался на колесах первого советского лунохода.
Для вентильных двигателей обязателен к применению датчик положения ротора, чтобы в зависимости от положения ротора менять с помощью бесконтактного коммутатора направление тока в секциях обмотки статора. Такой датчик проще всего реализуется фотоэлектрическим способом. Обычно при трехфазной обмотке число полюсов вентильного двигателя 2р = 6 или 2р = 8 (рис. 10.32).

Рис. 10.32. Принцип формирования сигналов управления вентильным двигателем: а – вид диска и чувствительных элементов датчика положения ротора; б – диаграмма сигналов управления
Чаще всего датчик положения ротора совмещен с импульсным или импульсно-фазным датчиком положения для следящего электропривода.