

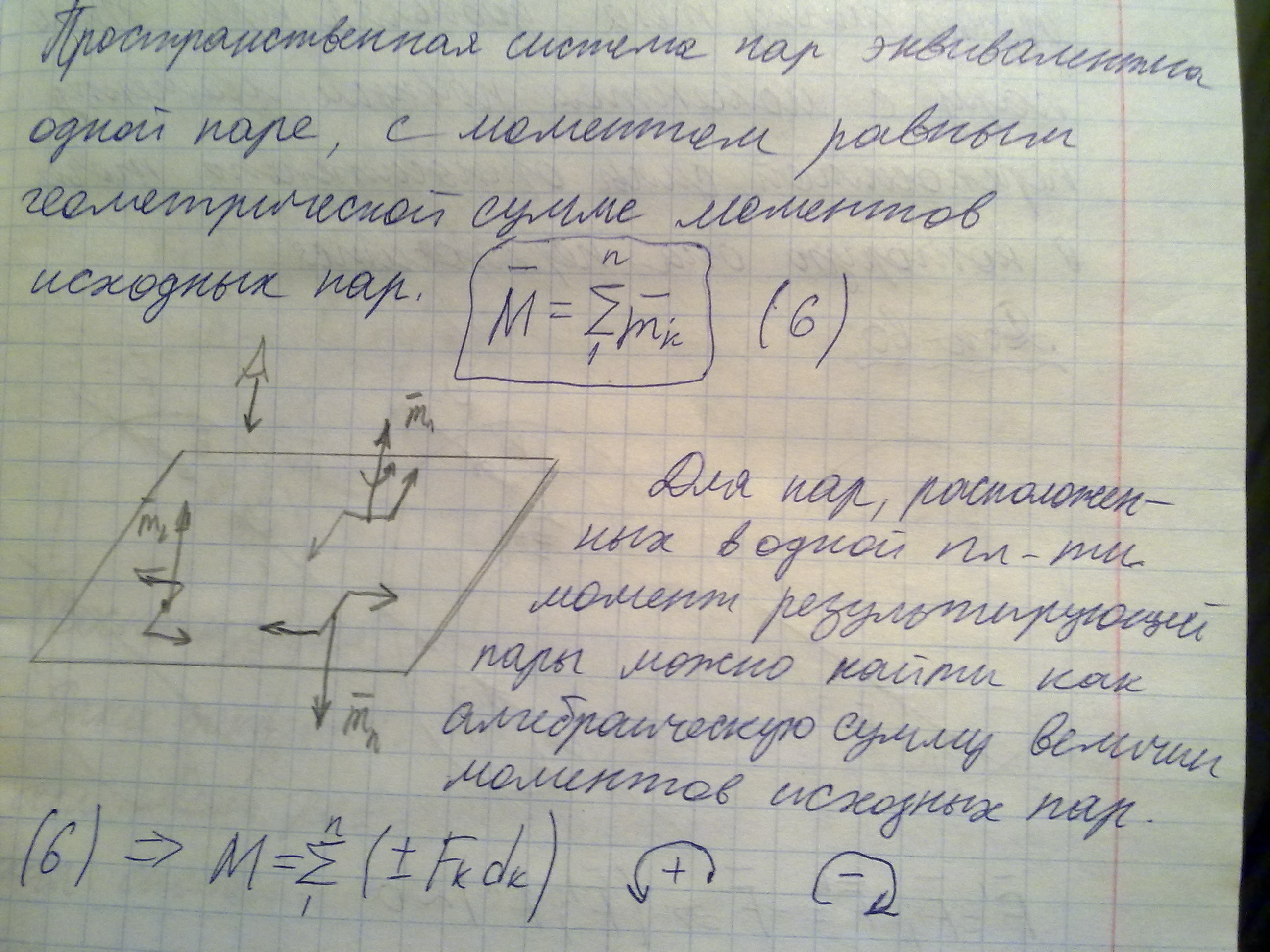
Теорема об эквивалентности пар в пространстве.
Пары сил в пространстве эквивалентны, если их моменты геометрически равны.
Теорема о сложении пар в пространстве.
Две пары сил, действующих на одно и то
же твердое тело, и лежащие в пересекающихся
плоскостях, можно заменить одной
эквивалентной парой сил, момент которой
равен сумме моментов заданных пар
сил. ![]()
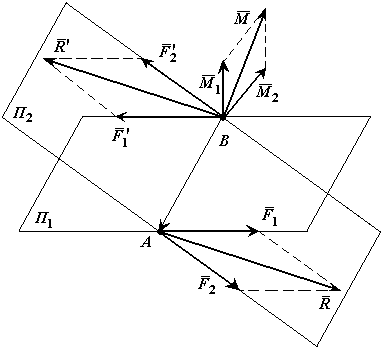
Доказательство: Пусть имеются две пары
сил, расположенные в пересекающихся
плоскостях. Пара сил
![]() в плоскости
в плоскости
![]() характеризуется моментом
характеризуется моментом
![]() ,
а пара сил
,
а пара сил
![]() в плоскости
в плоскости
![]() характеризуется моментом
характеризуется моментом
![]() .
.
Расположим пары сил так, чтобы плечо
пар было общим и располагалось на линии
пересечения плоскостей. Складываем
силы, приложенные в точке А и в точке
В,
![]()
![]() .
Получаем пару сил
.
Получаем пару сил
![]() .
.
![]()
Что и требовалось доказать.
Для системы пар, расположенной в пространстве, результирующую пару можно найти, последовательно применяя доказанную теорему.
Условия равновесия системы пар на плоскости и в пространстве.
Теорема. Для равновесия пар сил, приложенных к твердому телу, необходимо и достаточно, чтобы момент эквивалентной пары сил равнялся нулю.
![]()
Теорема. Для равновесия пар сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма проекций моментов пар сил на каждую из (двух) трех координатных осей была равна нулю.
![]()
![]() - на плоскости
- на плоскости
![]() - в пространстве
- в пространстве
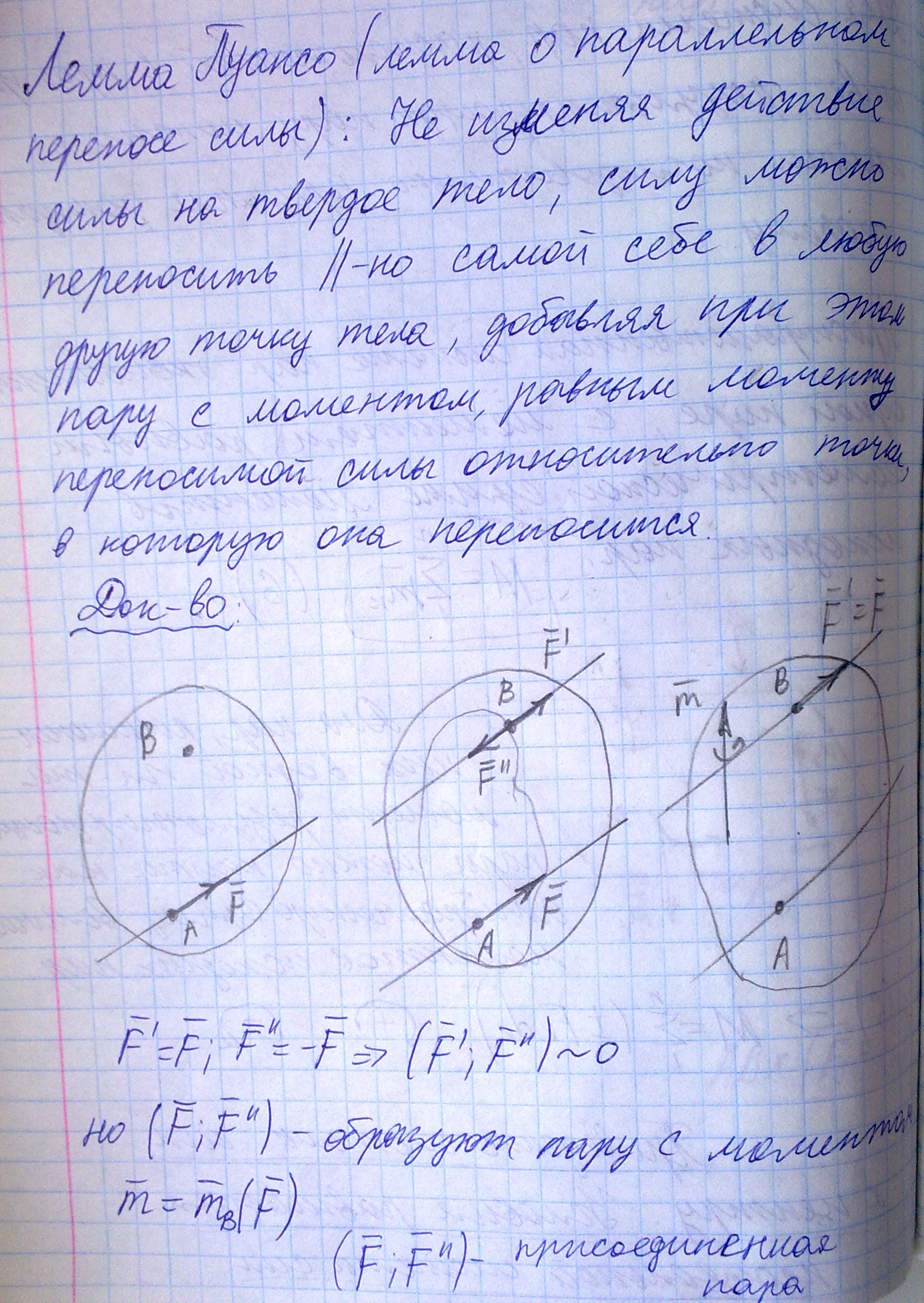
Лемма о параллельном переносе силы (лемма Пуансо).
П риведение произвольной плоской системы сил к центру. Главный вектор и главный момент произвольной плоской системы сил.
Пусть
к твердому телу приложена плоская
система сил
![]() .
Возьмем в теле произвольную точку О,
которую будем называть центром приведения,
и приложим к ней попарно уравновешенные
силы
.
Возьмем в теле произвольную точку О,
которую будем называть центром приведения,
и приложим к ней попарно уравновешенные
силы
![]() и
и
![]() . Заметим, что силы
. Заметим, что силы
![]() и
и
![]() образуют при этом пару сил, так что можно
считать силу
перенесенной параллельно самой себе
в точку О - замененной силой
образуют при этом пару сил, так что можно
считать силу
перенесенной параллельно самой себе
в точку О - замененной силой
![]() с присоединением пары. Поступив так и
со всеми оставшимися силами, мы приведем
заданную систему сил к совокупности
пучка сил
с присоединением пары. Поступив так и
со всеми оставшимися силами, мы приведем
заданную систему сил к совокупности
пучка сил
![]() , приложенных в точке О, и совокупности
пар
, приложенных в точке О, и совокупности
пар
![]() .
Сходящиеся силы имеют равнодействующую
.
Сходящиеся силы имеют равнодействующую
![]() ,
приложенную в точке О и равную векторной
сумме всех сил системы. Эта сумма
называется главным вектором системы и
обозначается
,
приложенную в точке О и равную векторной
сумме всех сил системы. Эта сумма
называется главным вектором системы и
обозначается
![]() .
.
Пары
можно заменить одной результирующей
парой с моментом
![]() ,
равным алгебраической сумме их моментов.
Так как момент пары равен сумме моментов
входящих в нее сил относительно любой
точки плоскости пары, то для каждой из
складываемых пар
,
равным алгебраической сумме их моментов.
Так как момент пары равен сумме моментов
входящих в нее сил относительно любой
точки плоскости пары, то для каждой из
складываемых пар
![]()
Поэтому
сумма моментов пар равна сумме моментов
самих заданных сил относительно точки
О, которая называется главным
моментом
системы относительно этой точки и
обозначается
![]() .
Таким образом, систему сил, произвольно
расположенных на плоскости, можно
заменить совокупностью одной силы
,
равной их главному вектору
,
и приложенной в произвольно выбранном
центре приведения, и одной пары, момент
которой
равен главному моменту
заданных сил относительно центра
приведения. Это утверждение называется
теоремой Пуансо о приведении плоской
системы сил к данному центру.
.
Таким образом, систему сил, произвольно
расположенных на плоскости, можно
заменить совокупностью одной силы
,
равной их главному вектору
,
и приложенной в произвольно выбранном
центре приведения, и одной пары, момент
которой
равен главному моменту
заданных сил относительно центра
приведения. Это утверждение называется
теоремой Пуансо о приведении плоской
системы сил к данному центру.
Главным вектором системы сил называется вектор, равный векторной сумме этих сил.
Главный вектор и главный момент системы определяются по формулам:
![]()
![]()