

Приведение произвольной пространственной системы сил к центру (теорема Пуансо). Главный вектор и главный момент произвольной пространственной системы сил.
Основная теорема статики (Пуансо).
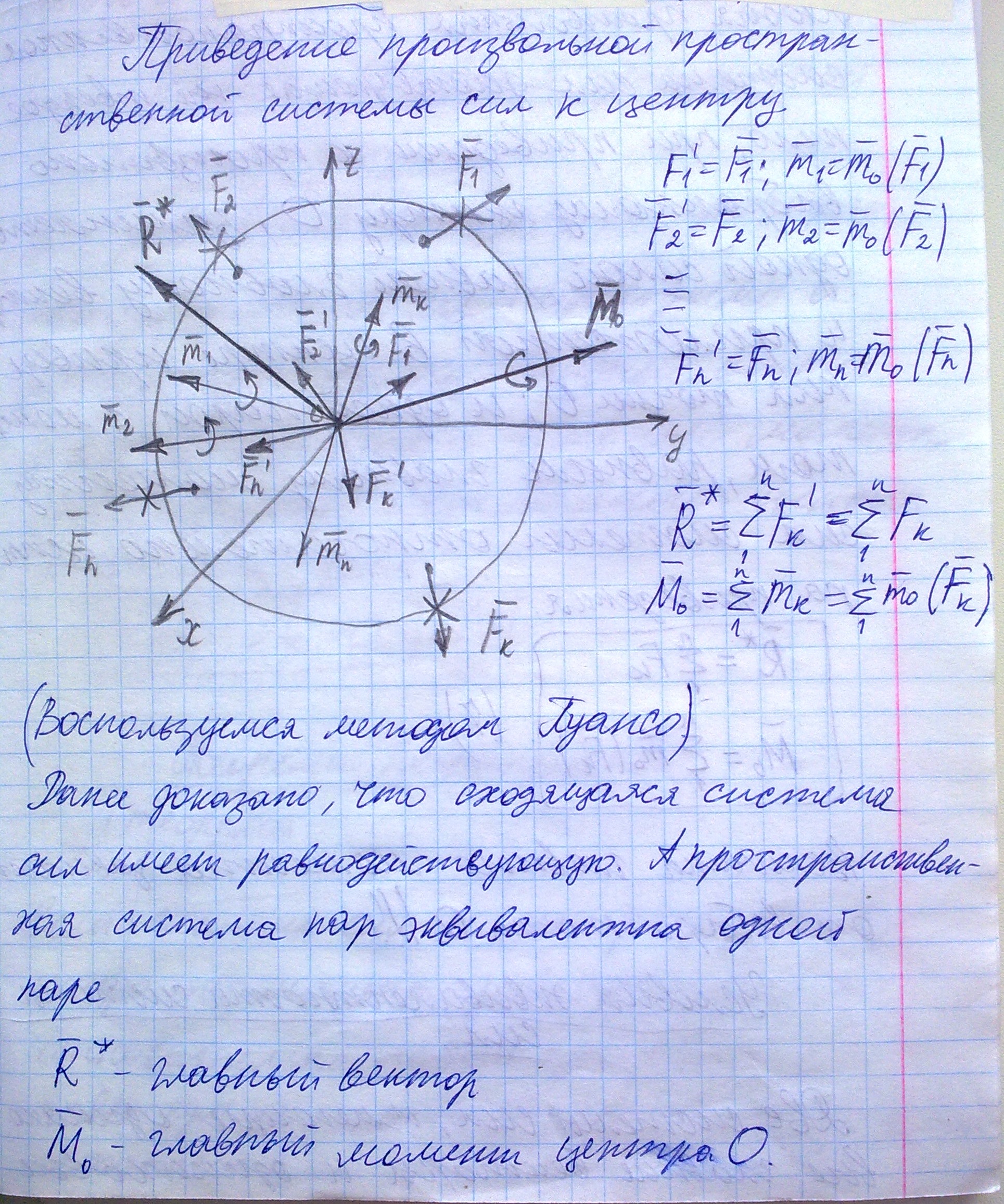
Любую произвольную систему сил, действующую на твердое тело, можно в общем случае привести к силе, равной главному вектору и паре сил с моментом. Равным главному моменту сил системы относительно центра приведения. Этот процесс замены системы сил одной силой и одной парой сил называется приведением системы сил к заданному центру.
Главным вектором системы сил называется вектор, равный векторной сумме этих сил.
![]()
Главным моментом системы сил относительно точки О тела, называется вектор, равный векторной сумме моментов всех сил системы относительно этой точки.
![]()
Инварианты произвольной пространственной системы сил.
При перемене центра приведения не изменяются главный вектор и скалярное произведение главного вектора на главный момент. Говорят, что эти величины инвариантны относительно выбора центра приведения.
Первым статическим инвариантом называется главный вектор Fo. В более узком смысле этого слова под первым инвариантом понимают квадрат модуля главного вектора
I1=Fo2=Fz2+Fy2+Fz2
Вторым статическим инвариантом называется скалярное произведение главного вектора на главный момент:
I2=Fo . Mo=FxMx + FyMy + FzMz.
При перемене центра приведения проекция главного момента на направление главного вектора не изменяется. Заметим, что при Fo≠0 это следствие можно принять за определение второго инварианта.
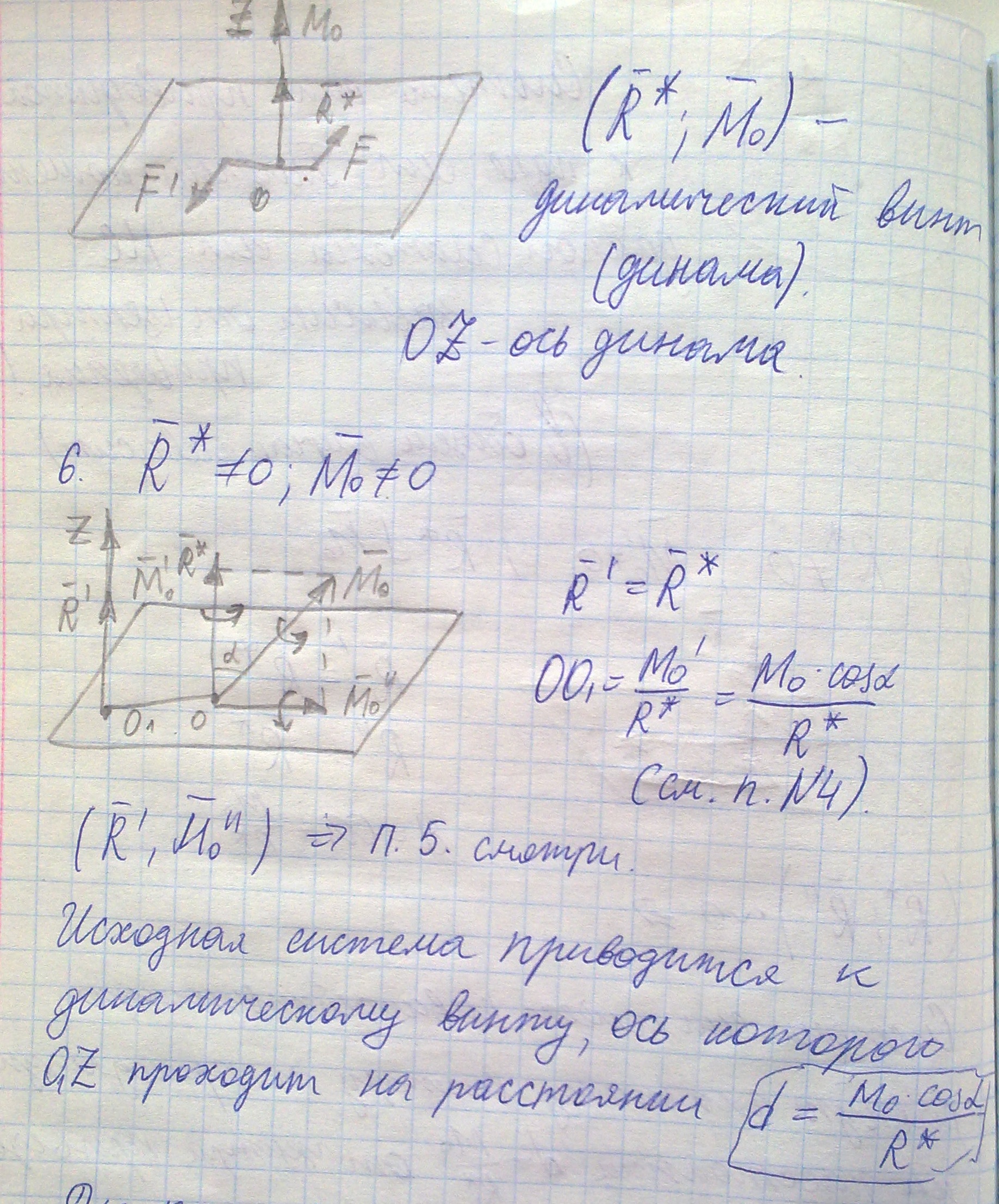
Совокупность силы и пары сил с моментом, коллинеарным силе, называется динамическим винтом или динамой. Так как плоскость действия пары перпендикулярна моменту пары, то динамический винт представляет собой совокупность силы и пары сил, действующей в плоскости, перпендикулярной силе.
Если второй статический инвариант не равен нулю, то систему сил можно привести к динаме.
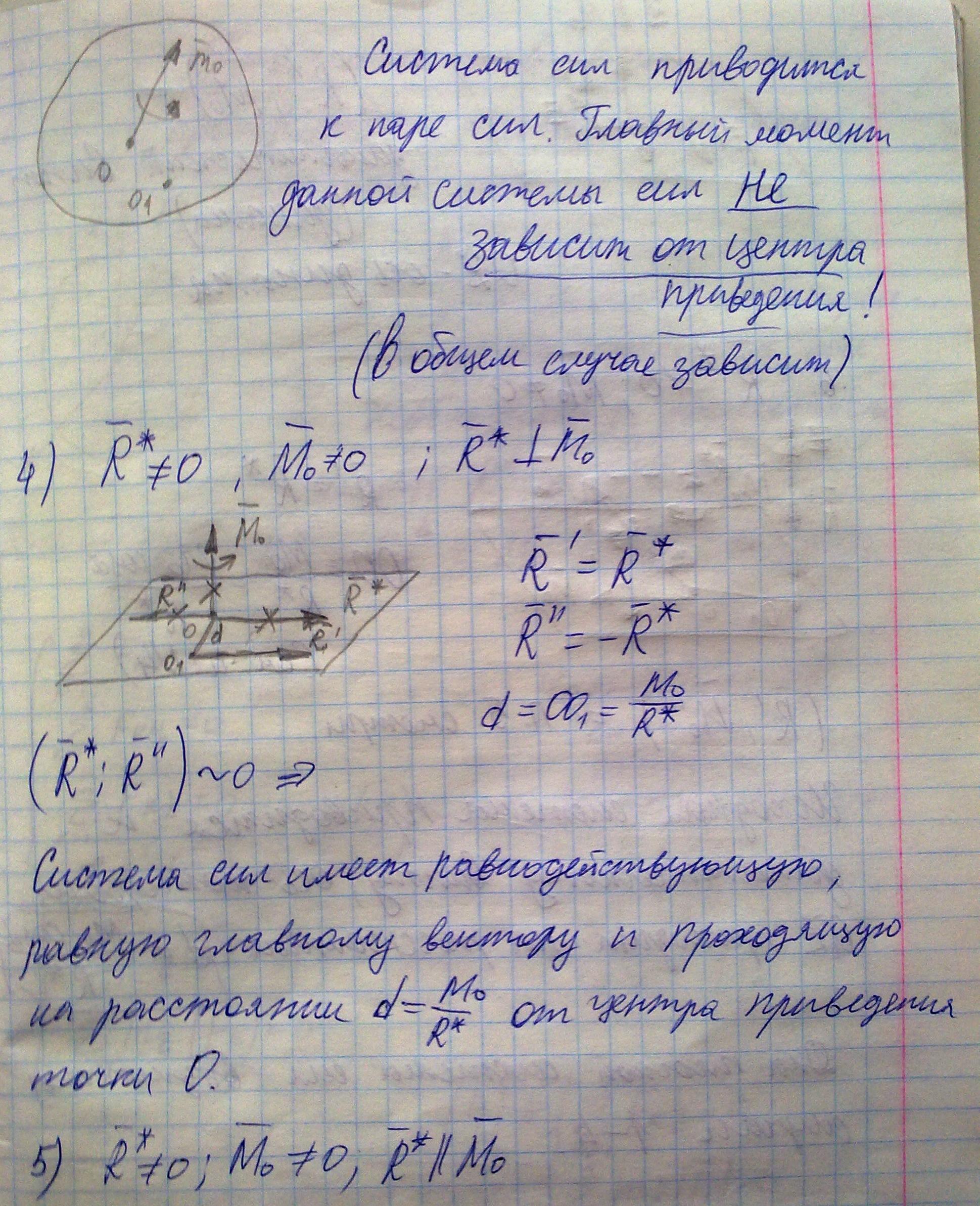
Если при приведении системы сил к динамическому винту главный момент динамы оказался равным нулю, а главный вектор отличен от нуля, то это означает, что система сил приведена к равнодействующей, причем центральная ось является линией действия этой равнодействующей.
Частные случаи приведения произвольной пространственной системы сил к центру.
Условия и уравнения равновесия произвольной пространственной системы сил. Частный случай пространственной системы параллельных сил.
Для равновесия
произвольной пространственной системы
сил необходимо и достаточно, чтобы
главный вектор
![]() и главный момент
и главный момент
![]() были равны нулю.
были равны нулю.

В частном случае линии действия сил, образующих пространственную систему, могут оказаться параллельными. Тогда одну из осей (например, ось z) выгодно расположить параллельно силам (рис. 160), а две другие оси расположатся в плоскости, перпендикулярной к линиям действия сил.
Легко понять, что для уравновешенной пространственной системы параллельных сил вместо шести уравнений можно составить лишь три: алгебраическую сумму проекций сил на ось, параллельную данным силам, и два уравнения моментов относительно двух других осей. Остальные уравнения превратятся в тождество вида 0=0.
Для равновесия пространственной системы параллельных сил, действующих на твердое тело, необходимо и достаточно, чтобы сумма проекций этих сил на ось, параллельную данным силам была равна нулю и суммы моментов этих сил относительно двух координатных осей, перпендикулярным силам, также были равны нулю.
![]()
![]()
- проекция силы на ось Oz.
Для пространственной системы параллельных сил можно составить лишь три уравнения равновесия, поэтому, чтобы задача была статически определимой, в ней должно содержаться не более трех неизвестных сил.