

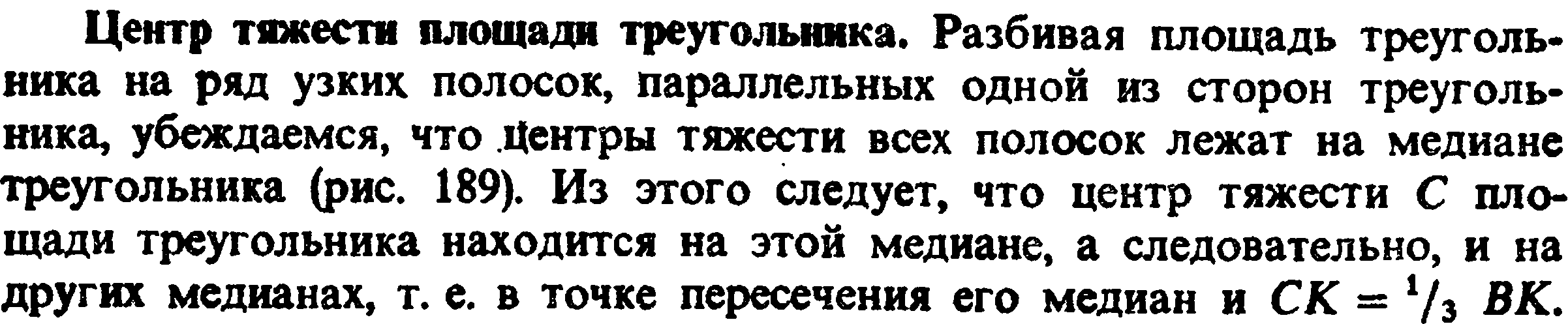
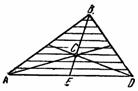
Центр тяжести однородных тел. Центр тяжести объема, поверхности, линии. Примеры (центр тяжести треугольника, дуги окружности, кругового сектора).
Тело называется однородным, если у (х, у, z) = y = const.
Для однородного твердого тела
![]() и формулы получают вид:
и формулы получают вид:


![]() - Объем всего
тела.
- Объем всего
тела.
Подставив последние выражения в (10) и (11), получаем формулы центра тяжести объема:

Из полученных формул видно, что положение центра тяжести однородного тела зависит только от его геометрической формы. По этой причине точку C и называют центром тяжести объема.
У тонких однородных поверхностей (пластины, листы, сферы и т.д.) и однородных линий (канаты, проволока) веса единицы площади или длины так же одинаковы во всех точках. Поэтому из формул (12) и (13) можно определить положения центров тяжести поверхности или линии.
Обозначая как si и S площадь части поверхности и всю ее площадь, найдем по формулам (13) координаты центра тяжести поверхности: (14)

Если вся поверхность лежит в одной плоскости, например в плоскости OXY, то в формулах (14) все zi = 0 и ZC = 0, а координаты XC и YC определяют положение центра тяжести площади.
Обозначая, как li и L длину части линии и всю ее длину, находим по формулам (13) координаты центра тяжести линии:



.


Предмет и содержание кинематики. Основные понятия и задачи кинематики.
Кинематика - раздел механики, в котором изучаются геометрические свойства движения тел без учета их инертности (массы) и действующих на них сил.
Система отсчета - жестко связанная какая-нибудь система координат, вместе с телом.
Отсчет времени ведется от некоторого начального момента (t=0), о выборе которого в каждом случае условливаются. Всякий данный момент времени t определяется числом секунд, прошедших от начального момента до данного; разность между какими-нибудь двумя последовательными моментами времени называется промежутком времени.
Непрерывная линия, которую описывает движущаяся точка относительно данной системы отсчета, называется траекторией точки.
Если траекторией является прямая линия, движение точки называется прямолинейным, а если кривая — криволинейным.
Кинематически задать движение или закон движения тела (точки) — значит задать положение этого тела (точки) относительно данной системы отсчета в любой момент времени.
Основная задача кинематики точки и твердого тела состоит в том, чтобы, зная закон движения точки (тела), установить методы определения всех кинематических величин, характеризующих данное движение.
36. Способы задания движения точки. Связь между координатным и естественным способами задания движения точки. Движение точки по отношению к избранной системе отсчета считается заданным, если известен способ, при помощи которого можно определить положение точки в любой момент времени.